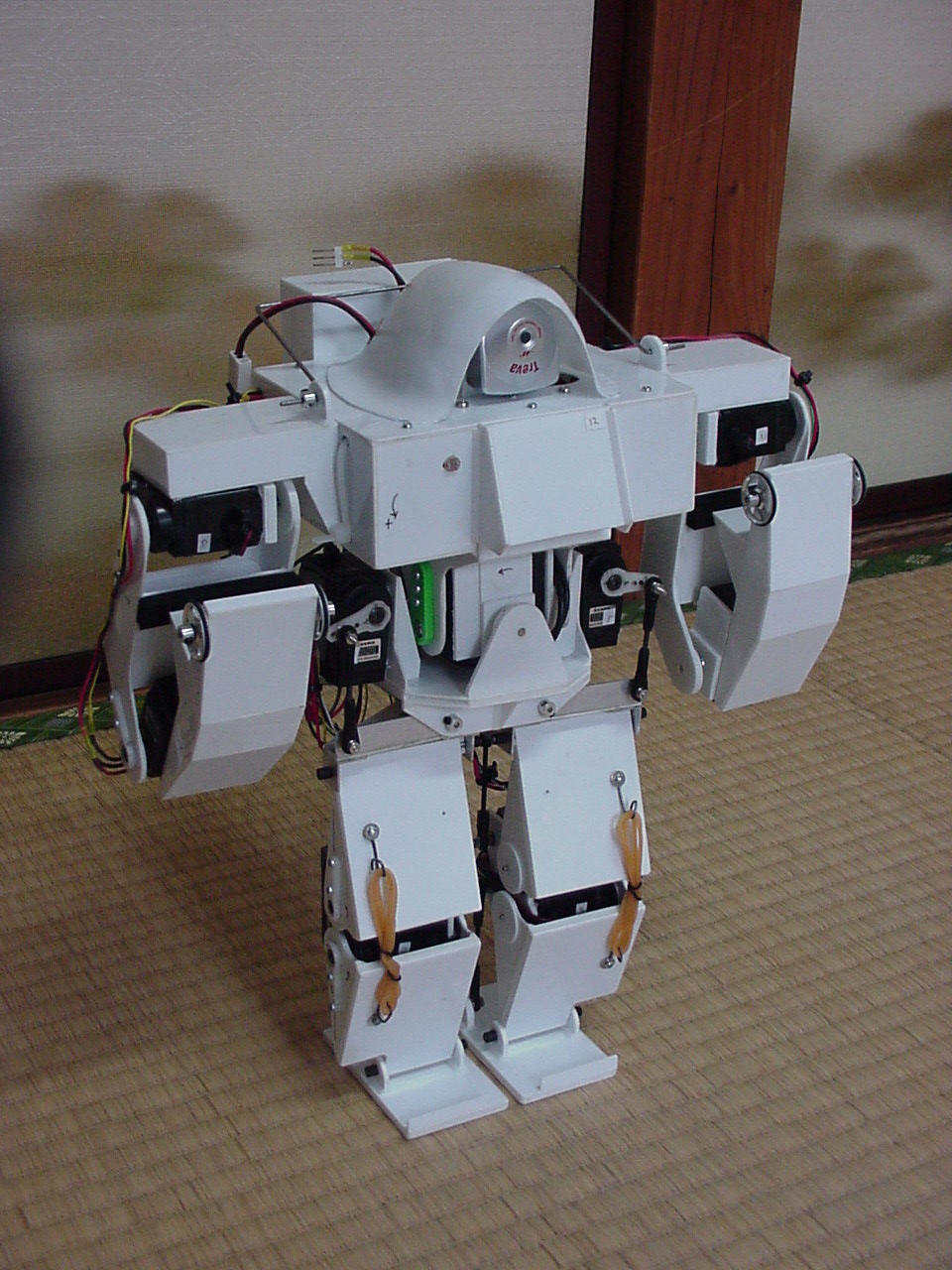
| 全高 | 312mm |
| 全長 | 160mm |
| 全幅 | 260mm |
| 本体の重量 | 約1200g+α |
| 合計自由度 | 13(脚:6、腕:4、腰:2、首:1) |
| モーター |
RC用サーボモーター |
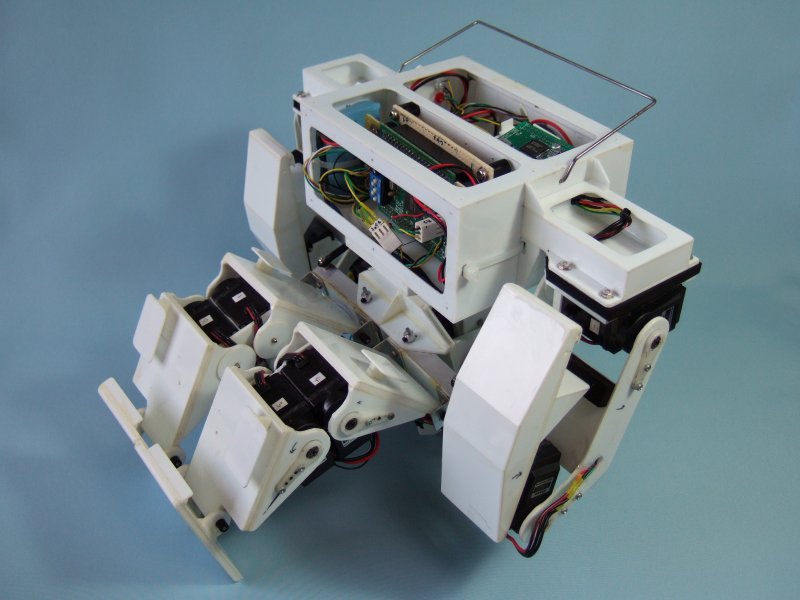
| 電源 |
ニッケル水素電池 (7.2V 700mAh) |
| 構造材料 |
田宮模型製 プラ板(プラモデルと同じスチロール樹脂) |
| センサー |
|
| CPU |
H8/3069F(25MHz, 2M byte RAM) AKI-H8/3664F(16MHz / 2 kbyteRAM)×2個(※) |
2006.02.17:自律モード
|
|
2005.11.15:クロカン歩き
|
|
2005.11.25:スリップの少ない歩行
|
|
2005.10.19:資格審査モーション
|
|
2006.02.26:仰向けからの起き上がり
|
|
2005.11.18:方向転換
|
|
メカニクス |
エレクトロニクス |
ソフトウェア |
| 機構や構造等主にプラ板やアルミで出来ている部分や 形に関する情報です。 | マイコンやセンサーのハード等、主に電子回路に関する 情報です。 | ロボットを動かすためのソフトウェアに関する情報です。 |
|
関連技術 |
その他 |
写真 |
| 本サイトの他のロボットと共通する技術に関する情報です。 |