1.全体的な設計の方針
全ての部分を、なるべく軽量かつ十分な強度を持つよう留意しました。
(ラジコンの飛行機を作る気持ちに近い感じです。)
製作時間の短縮のため、直線で構成された中空のボックス構造を組み合わせた
形になっています。
最大トルクが3.3kg・cmのRCサーボ主体で第8回ROBO-ONEの規定を満たす
ロボットにするため、小型軽量化
を志向し、ロボットの質量の大きな部分を占めるRCサーボの個数をなるべく少なく
する方針としました。
関節可動範囲の考え方
ROBO−ONEの規定に「起き上がれること」というのが有るので、寝ている
状態から起き上がれるように各関節の最大可動範囲を決定しました。
股のロール軸は、歩行時も起き上がり動作時も、可動範囲はあまり必要ないので
、関節駆動トルクを優先してリンクで駆動しています。
サーボから関節に接続するリンクはRCヘリコプター用の物を使用しています
関節の駆動方式
股のロール軸で4節リンクを使っている他は、RCサーボの出力軸でダイレクトに
関節を動かしています。ヒザは、いっぱいまで腰を落として屈伸する時にRCサーボの
出力が不足するので、ソレを補うため輪ゴムでパワーアシストしています。
大きさと重心
持ち運びのことを考えて、標準サイズのRCサーボを使いつつ、なるべく小さくなる
様に考えました。腰から上を揺らして重心を移動しながら歩行しますが、上半身を
傾けた状態で片脚に重心をを移しきれることは考慮せず、上半身の慣性モーメント
を大きくして、動的に重心を移動しながら歩くように考えました。
重量配分
製作の容易さを重視して、全身に均等に重量が配分される様に考えています。
腰の辺りに重心を持って行きたいところでしたが、配置の都合で腹の辺り
(腰のロール軸周辺)に全身の重心があります。
2.RCサーボの機種選定
バランスの制御や起き上がりで要となる腰に強力で、制御が良く効くRCサーボを
使った他は、材料費削減、軽量化、低消費電力化を志向しSX-101Zを
採用しました。
RCサーボの機種・使用場所一覧表
| 機種 |
トルク(kg・cm) |
速度(s/60度) |
重量(g) |
使用場所 |
説明 |
| SX-101Z |
3.3 |
0.18 |
45 |
腕、脚 |
車用、安価 |
| ERG-VB |
13.0 |
0.10 |
60 |
腰(ピッチ) |
車用 |
| ERG-WR |
8.2 |
0.07 |
60 |
腰(ロール) |
車用、デジタルサーボ |
3.構造材料
主に1mm厚の田宮模型のプラ板(スチロール樹脂の板)
を使っています。股関節周囲の金具がアルミです。
4.関節の構造とサーボのマウント方法
軸受けの構造
体の構造は主に1mm厚のプラ板ですが、プラ板製の軸受け周りは
板を2〜3枚重ねて強度を増し、シャフトをバカ穴に通しています。
サーボのマウント方法
すべて両面テープで貼り付けてあります。メンテナンス性、取り付け位置の精度等が
良くないですが、軽量、簡単、衝撃を吸収できる(ある程度は・・・)等の利点が
あります。両面テープは強力に貼れるけれども、剥がす時はきれいに剥がれることを
選択のポイントとしました。厚さ約0.6mm程度で、アクリルやブチルゴムの多孔質?
の材料などから出来ている両面テープをいろいろ試しています。
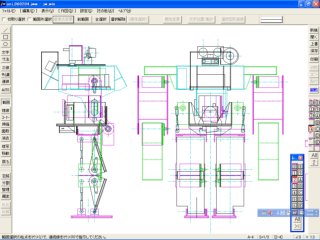
5.図面のダウンロード
ヒューマノイド型ロボットuniのトップページへ戻る
ホームへ戻る