|
2005/05/14:ヒザのRCサーボ
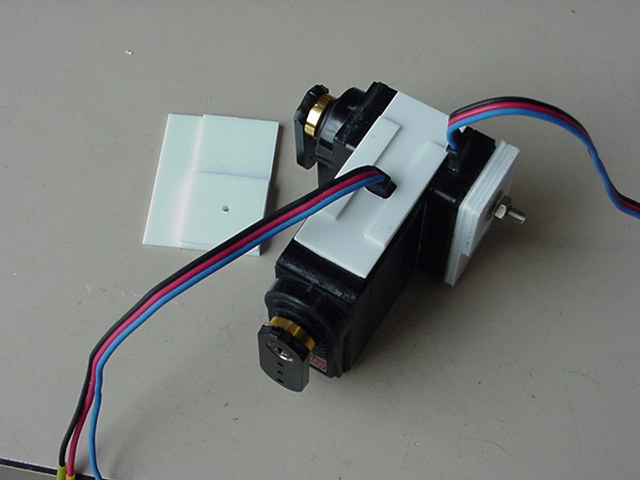
W6v3で調子が良かったので、uniでも両面テープによる固定を採用しました。
そして、少しでも関節の間隔を短くしてロボットを小さくするため、RCサーボのフランジ?部分
(ネジで固定する部分)は切り取りました。
|

|
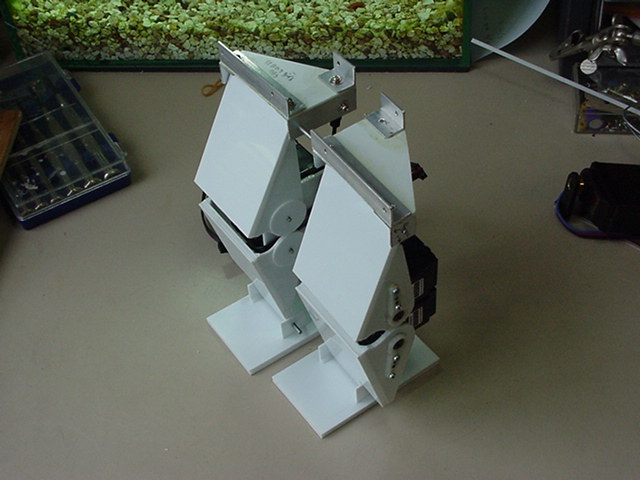
2005/04/24:右脚
仮組状態の右脚です。ヒザを挟んで上としたが平行リンクになっていますので、
足は常に地面と平行になります。
|

|
2005/05/14:右脚と部品状態の左脚
|


|
2005/05/22:反対軸
|

|
2005/05/22:両脚
|

|
2005/05/22:脚パーツの断面
脚パーツの断面です。「すね」の部分等は2mmの角棒を1mmの板で挟んだ
中空の構造になっています。
|

|
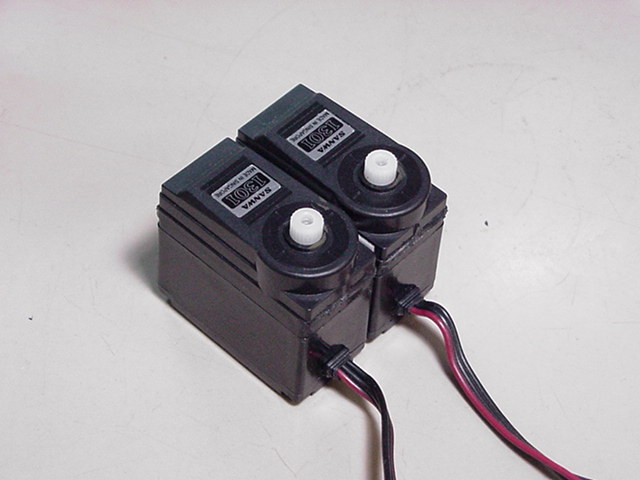
2005/05/29:腰関節
両面テープでとめてあります。使っているRCサーボ
(サンワERG-WRとERG-VB)
のトルクから考えると強度不足のような気がしますが、ロボットの全備重量が
小さいので、まあ動いています。
ROBO-ONE参加ロボットの足首に良く見かける組み合わせ方です。
|

|
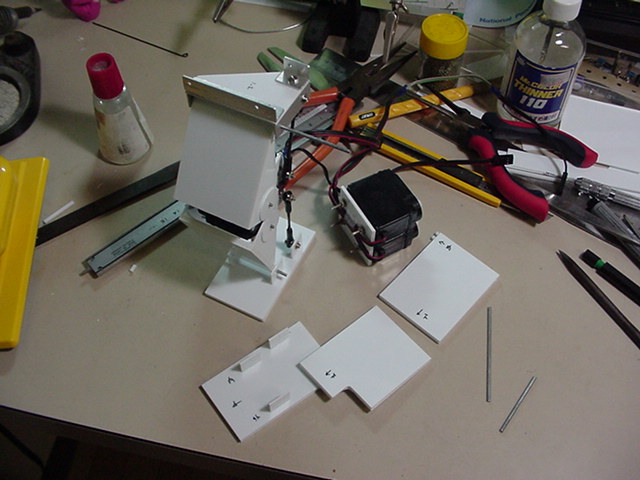
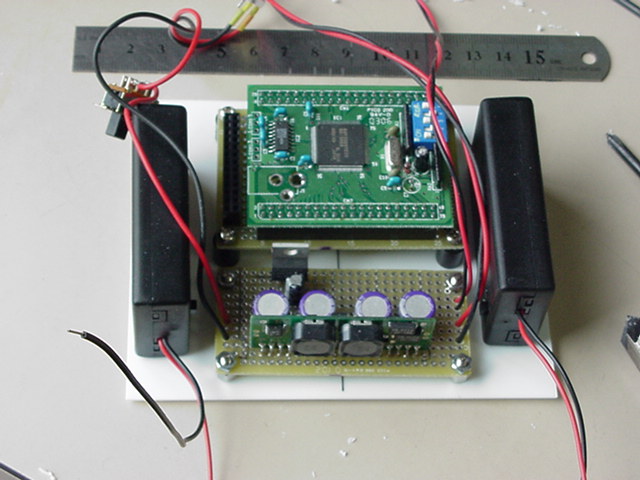
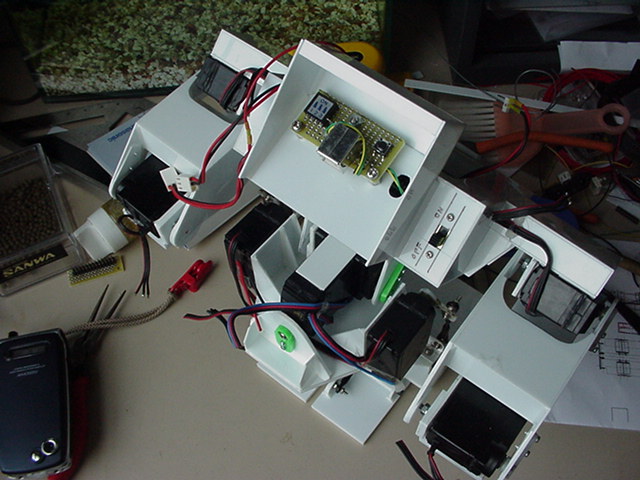
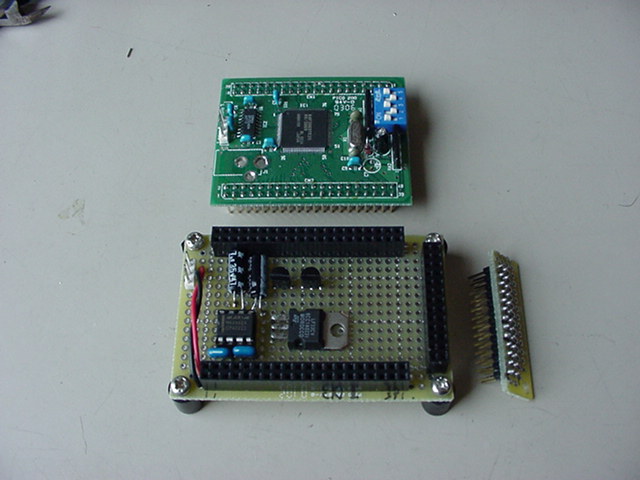
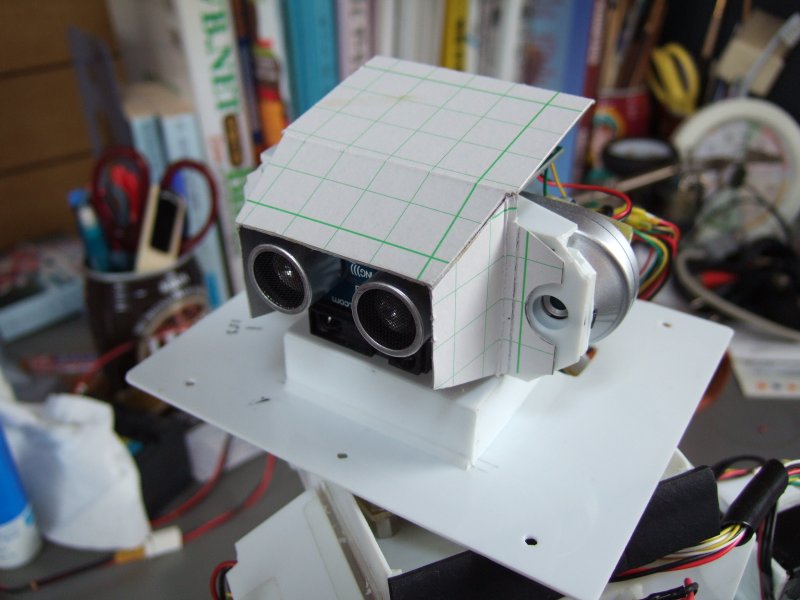
2005/06/04:胸部の寸法の確認
中に納める予定の物が入りきるか、底板を切り出した時点で、並べて確認しました。
両サイドの黒いのがバッテリーボックス、奥の基板がマイコン、手前が電源です。
|

|
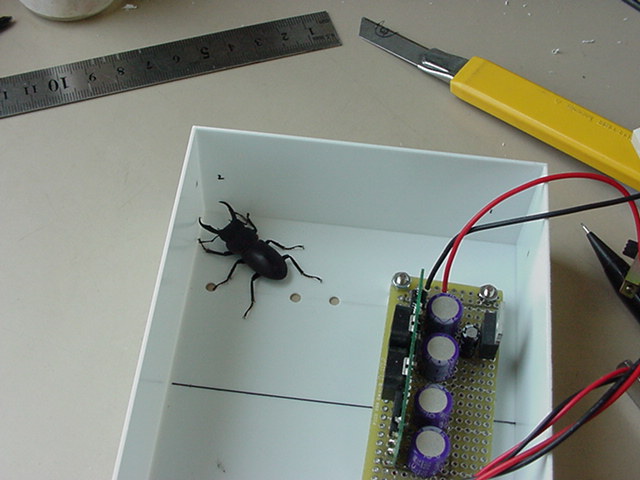
2005/06/04:側壁の接着
底板に側壁を接着したところです。関係ないですが、今年初めて飛んできたクワガタ
もついでに写真に収めました。
|

|
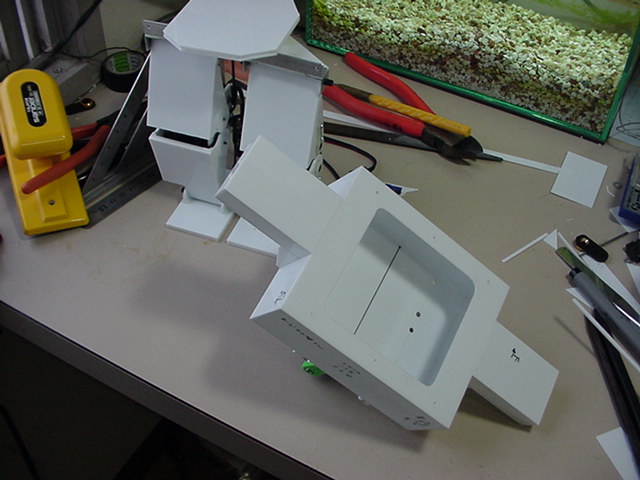
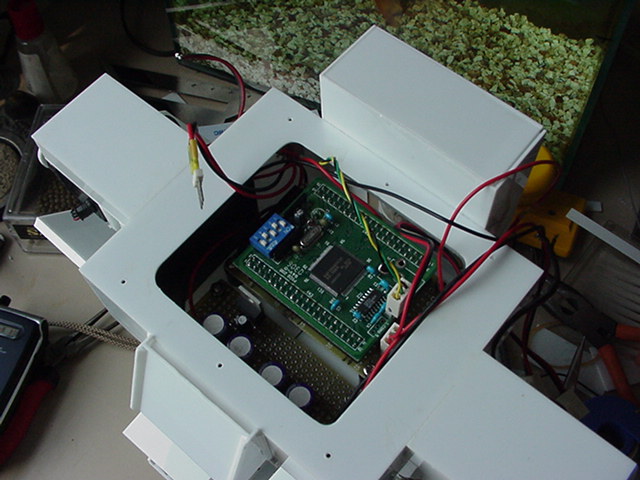
2005/06/04:上板の接着
上板を接着したところです。この穴がメンテナンスハッチになります。フタは
2×5のタッピングスクリュー6本で留めます。ケガキ線を入れやすいこの状態で、
スイッチやコネクタ用の穴あけ加工を行います。
|

|
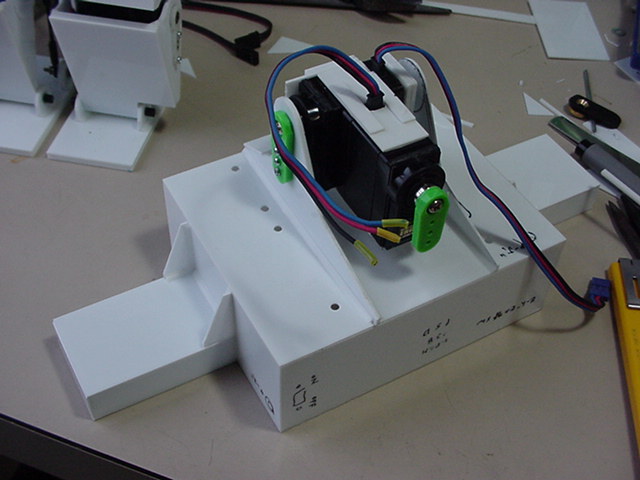
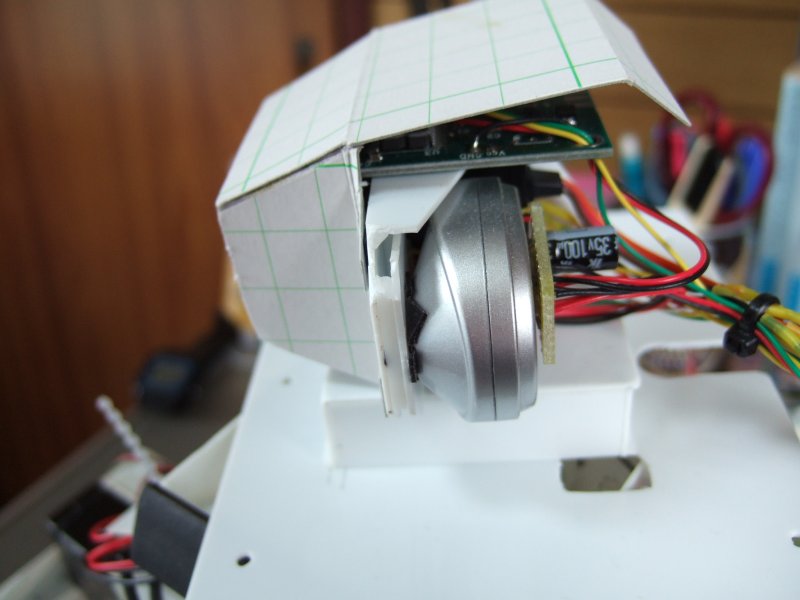
2005/06/11:腰関節
腰関節を胸の箱構造の下に取り付けました。箱から両側に張り出している部分が肩です。
グリーンのサーボホーンはKO製です。サーボホーンに開いている穴の位置が良かったので
このRCサーボに元々付いていたものと交換しました。
|

|
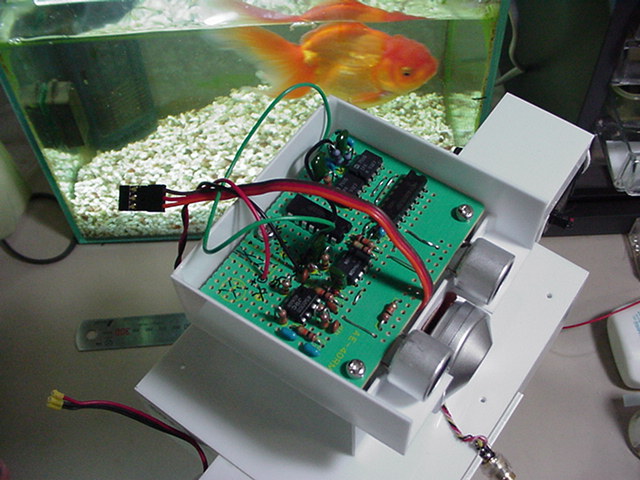
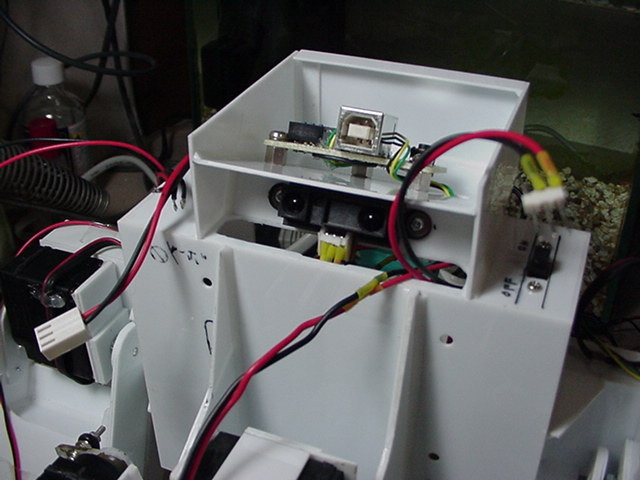
2005/06/11:胸部分
|

|
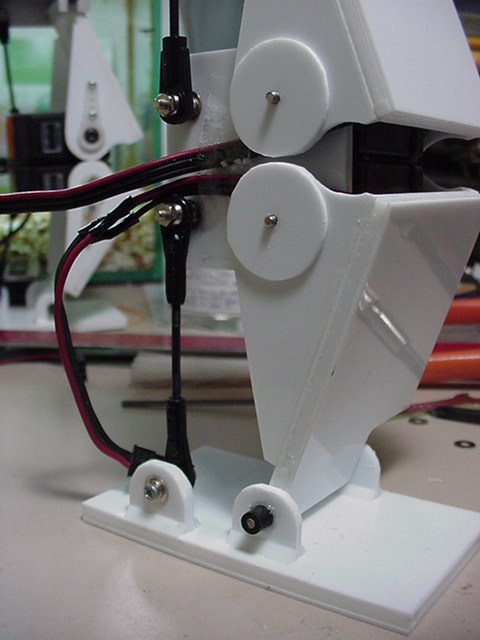
2005/06/17:平行リンクの調整
ボールジョイントのアジャスター(黒い棒上の部分)で、
脚の平行リンクが平行になるように調整しました。
(これをしないと真っ直ぐ立ちません)
ちなみに、これらの部品はRCヘリのローターマスト用の物を流用しています。
2L1用にいろんな長さのを買ってストックしてあった物の余りです。
|

|
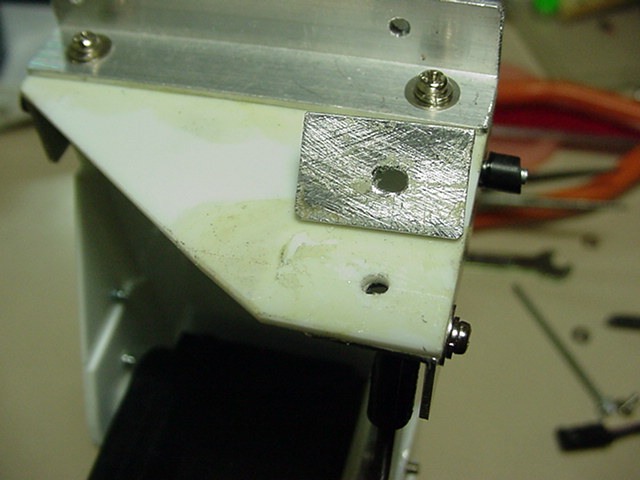
2005/06/17:足の平行調整
股関節の金具の穴を広げて、両足のつま先から踵までの平行を調整しました。
|

|
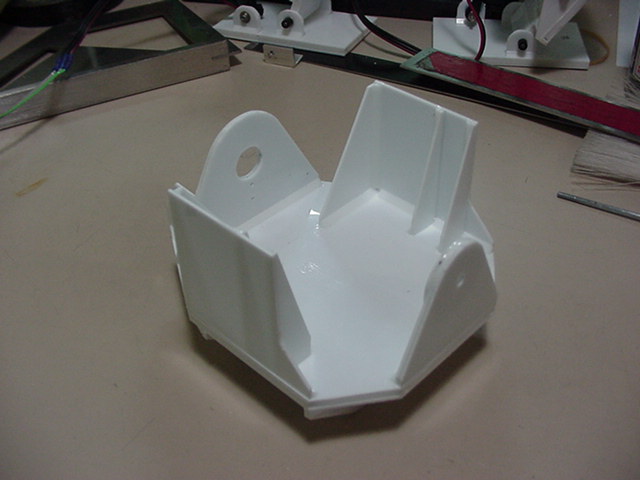
2005/06/17:骨盤(前より)
奥の直径10mmの穴がRCサーボの出力軸用、手前の3mmの穴が
その反対軸用です。
|
|
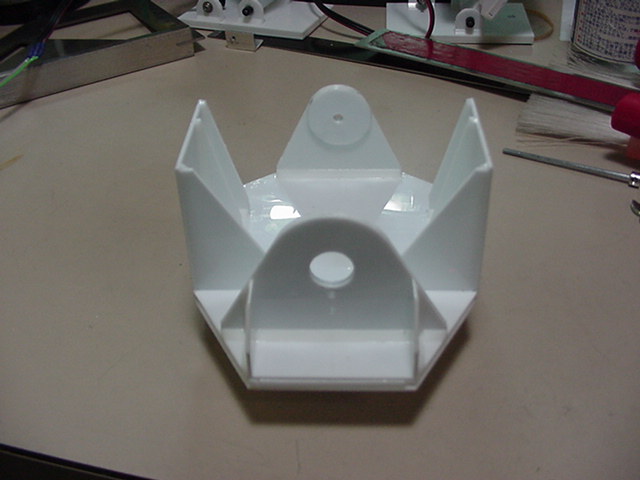
2005/06/17:骨盤(後ろより)
|

|
2005/06/17:骨盤(裏より)
|

|
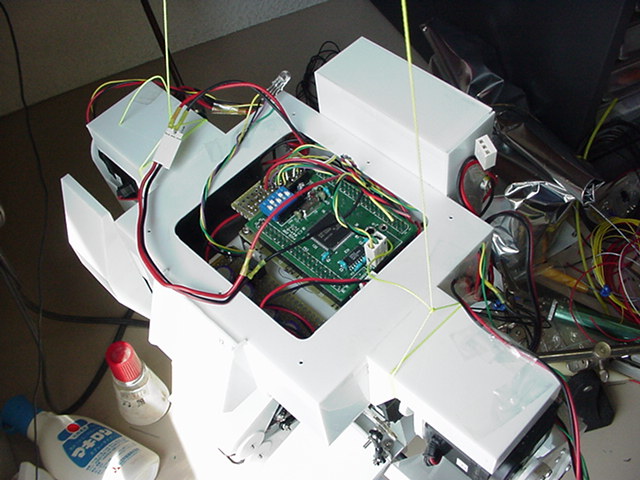
2005/06/25:前より
|

|
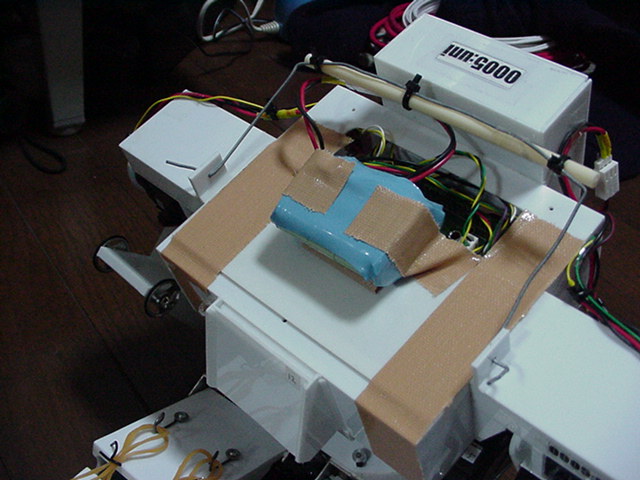
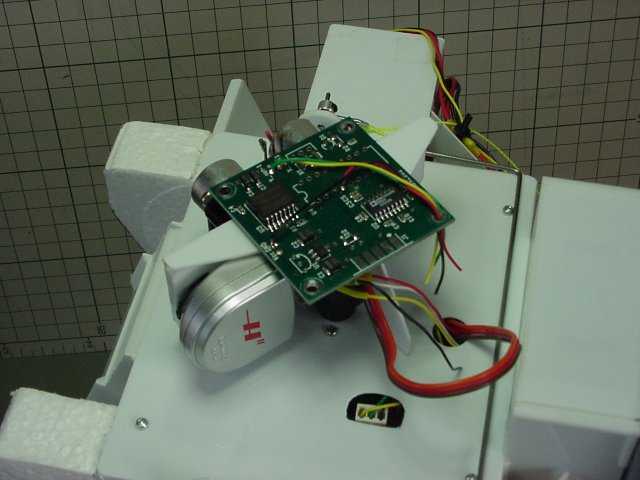
2005/06/25:後ろより
後ろから見たところです。「腰に回転運動が発生しない」を歩行時における安定化の
条件とするため、腰にピッチ軸方向とロール軸方向の角速度を検出するための
RCジャイロ(PG03)が付けています。
|

|
2005/07/02:腕
形はW6の腕をベースにしています。各部の板厚、サーボホーンの固定方法、グリッパー
部分がないこと、構造部材を全てプラ板にしたこと等が異なります。
|

|
2005/07/04:腕
肩からヒジまでの間をつなぐ部品です。こうして見ると「機械の部品」といった
感じがします。
|