以下は構想の続きです。
書きこみ順は、古い物から新しい物の順です。
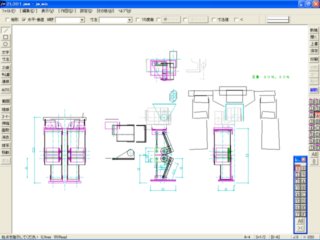
W6もキリのいいところまで出来たので、1つ新しく2足ロボを作ろうと図面を引き始めました。 以下に、現時点での構想をリストします。
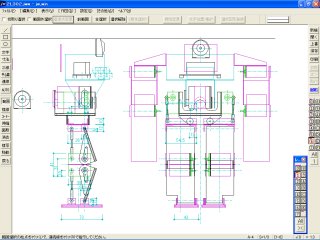
以下は構想の続きです。
仰向けからは起きられないような感じですが、いい事にしました。例によってプラ板 で作っていますが、転倒を気にしなくていいようにと考えると、プラ板や出始めの頃の RCカーに使われていたABSではなくて、 今のRCカーのシャーシに使われている様なプラスチック (あれ、正確にはなんていうんでしょう?) が、比重が小さくて、衝撃にも強くて良いのかなーなどと思いました。(量産にも向くし・・・)
各関節のシャフトは、自重が2L1/2L2の半分程度ということで、軽量化のため 3mmから2mmに落としました。前からシャフト自体のせん断とか、曲げとかの 強度的には2mmでもOKだったと思っていますが、軸受けの面圧が高くなると、軸受けの 穴が広がりやすくなってしまうのが、ちょっと気になるところです。
図面には今のところTREVAが描いてありますが、カメラをTREVAにするか、 ゲームボーイポケットカメラにするか迷っています。
こうして考えると、ステレオにしなければ、Trevaが良さそうな気がしてきました。

6L1用に買った単4のNI-MHバッテリーは東芝のTH-4Aで550mAhの容量でした。 で、今売っているやつはTH-4Kで(min.)840mAhでした。前のバッテリーもだいぶ 古くなり性能が落ちてきている気がしていたので、新しく12本買いました。
充電器は、2L2で用意した「ACアダプタと家電用のタイマ」の組み合わせの充電器で 充電時間を増やせば対応できそうなので、TH-4K用のものは購入しませんでした。 6本セットの状態で、この充電器での充電電流を計測し、充電時間を決めたいと思います。
|
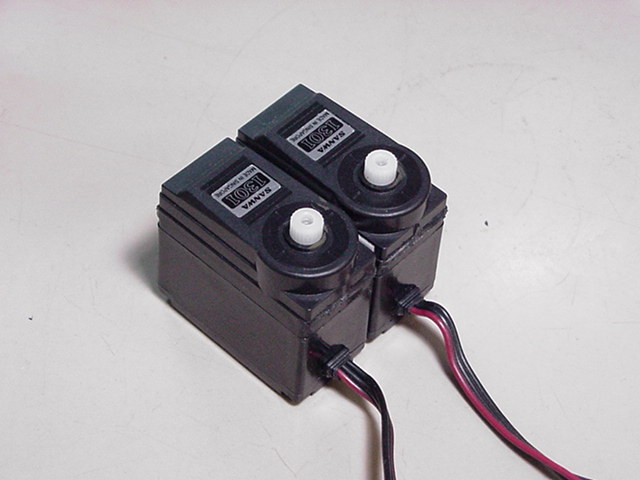
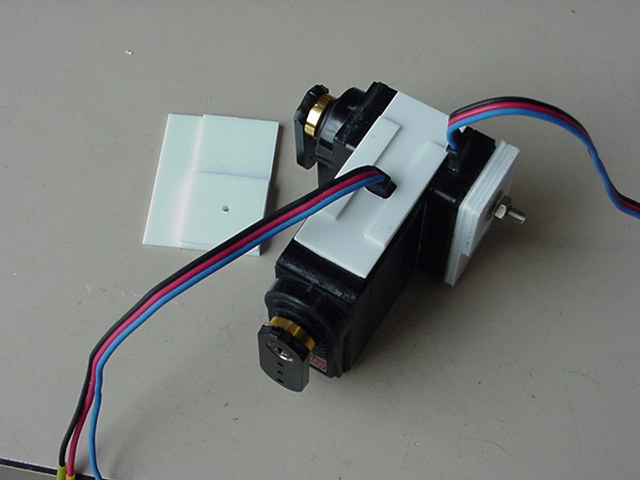
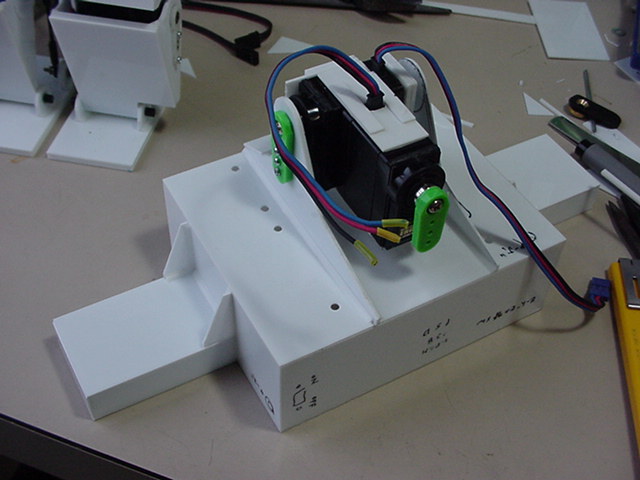
ヒザのRCサーボ
|

|
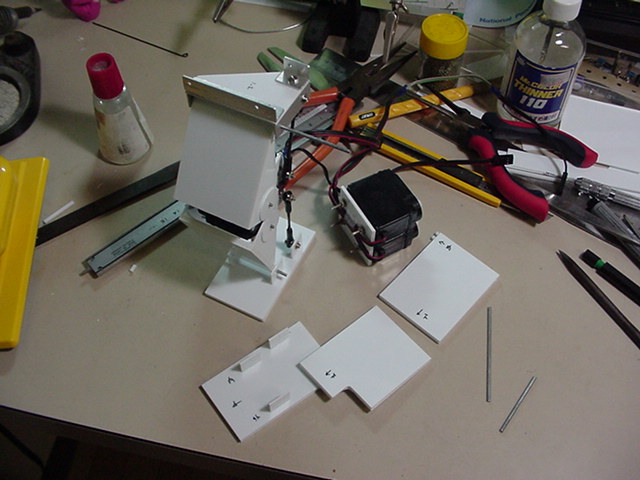
両面テープ
|
|
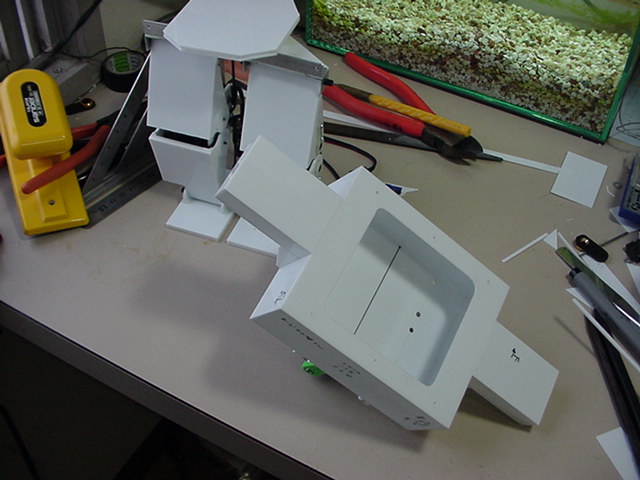
右脚と部品状態の左脚
|
雑学:そういえばmonoも同じ意味だよなー、とネットでuniと何が違うのか調べてみたら uniがラテン語系、monoがギリシャ語系の接頭語らしいです。
|
両脚
|

|
脚パーツの断面
|

|
ネジ止め剤
|

|
合成ゴム系接着剤
|
 
|
反対軸
ココは反対軸が元々付いている、ロボット用のRCサーボが適した場所ですね。 |
 |
腰関節
|
話はそれますが、いろんな工業製品のデザインがどうも平面的になってしまうのは、たとえ
CADが3Dでも、レンダリングが出来てグリグリ回転できても、結局、データ入力と確認
を平面的なディスプレイでするせいではないかという気がします。
バキュームフォームの型やフィギュアを粘土から作る時の感じと、3D CADを開発して
いて得られた知見とを比較すると、そう思います。
あと、フラットな定盤等、汎用の冶具で簡単に精度が出せて効率が良いのも、四角いモノが 多い理由だろうとも思います。(自由曲面は、データを作るのも、モノを作るのも、 強度の解析とかも、全て手間がかかりますね)
RCサーボの機種選定の理由
ロール軸は歩行時にジャイロからのフィードバックを行い、歩行の安定の要になるので ある程度パワーがあってレスポンスが良いデジタルサーボのERG-WRにしました。
その他の部分は、材料費を抑えるため、SRM-1301にしました。 (あるものを使うので、あんまり関係ないですが)
 |
寸法の確認
|
 |
側壁の接着
|
 |
上板の接着
|
 |
腰関節
|
 |
胸部分
|
4月17日の日誌に「2ヶ月くらいで歩けるくらいまで」とか書いてありますが・・・ぜんぜん 出来てないですね。
ちなみに、ハイトルクサーボ用のサーボホーンはホーン部分が厚くて剛性が高く、また、軸部分の 穴が広がりにくいように、軸部分の外周に金属(真鍮?)の輪がかかっています。
ヒザ用は、SRM-1301やSX-101Zに標準で付いてくるサーボホーンを使いました。
腕用は、転倒時にRCサーボのギア等が壊れるのを防ぐため、スプリング入りのサーボホーン (ラジコンカーのスペアパーツとしては「サーボセイバー」という名前で売っている)を 使うか検討しています。ボディーの構造がプラスチック製で弾性が高いことと、RCサーボを 両面テープで留めていることの2点を考慮すると、サーボセイバーを付けなくても、ある程度の 衝撃は逃がせるのではないかという気もします。
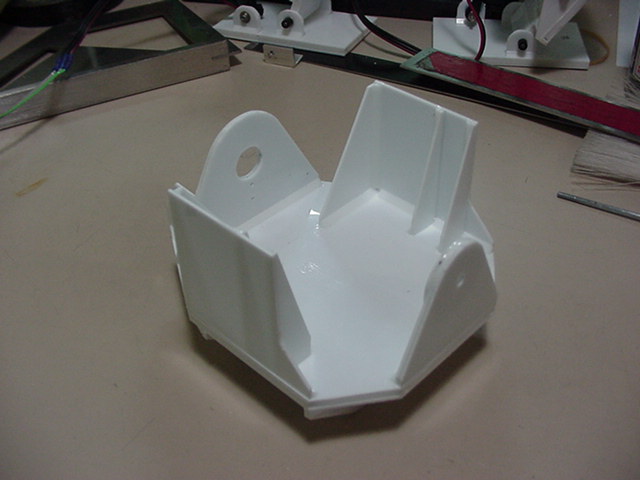 |
骨盤(前より)
|
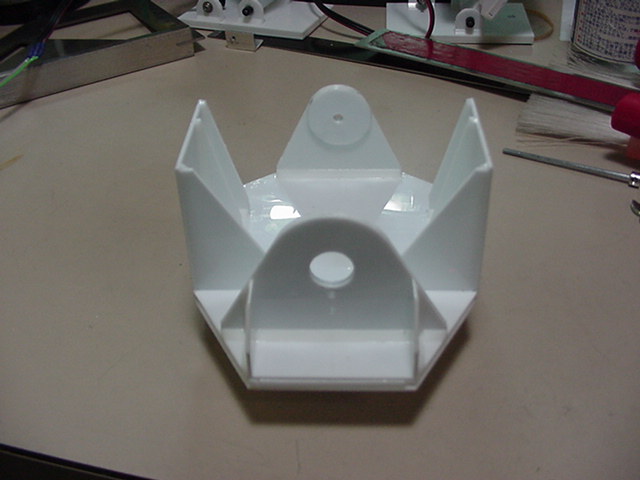 |
骨盤(後ろより)
|
 |
骨盤(裏より)
|
 |
足の水平調整
|
 |
足の平行調整
|
 |
棒やすり
|
 |
前より
|
 |
後ろより
|
 |
腕
|
 |
腕
|
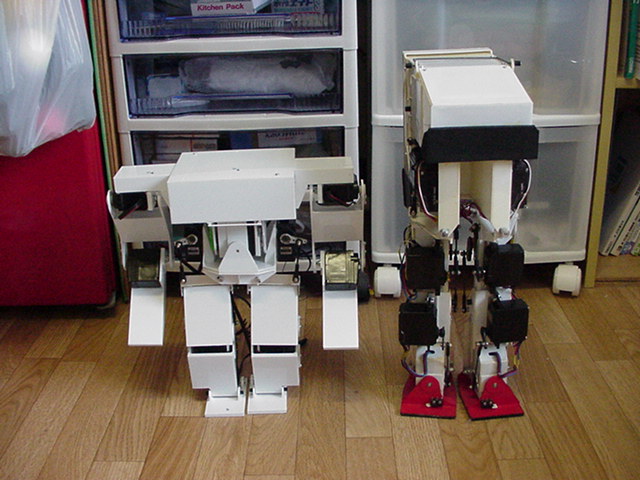 |
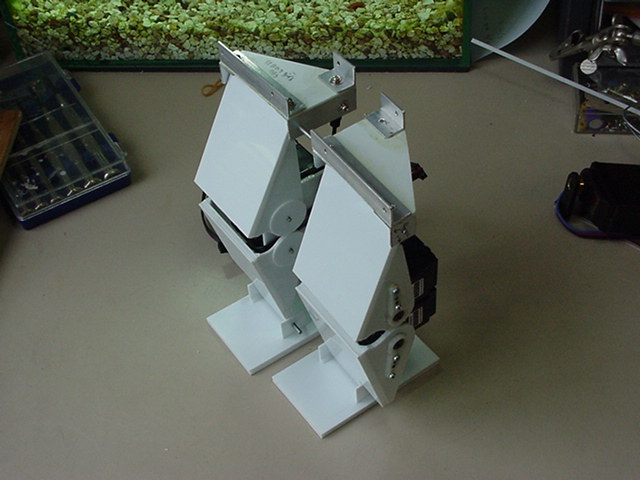
背くらべ
|
 |
全身
|
 |
超音波距離センサユニット
|
ちなみに計算は3.3*2/5.5=1.2となります。ここで*2は、両脚を合計する ための2です。
脚のRCサーボを強力なもの(例えばERG-VBとか)に替えるか、軽量化(例えば 頭をやめるとか)の対策が必要の様です。サーボの交換は、脚の作り直しになり、一度も 動かす前から作り直しは寂しいので、しばらく歩かせて様子を観察してから改造しよう と思いました。
  |
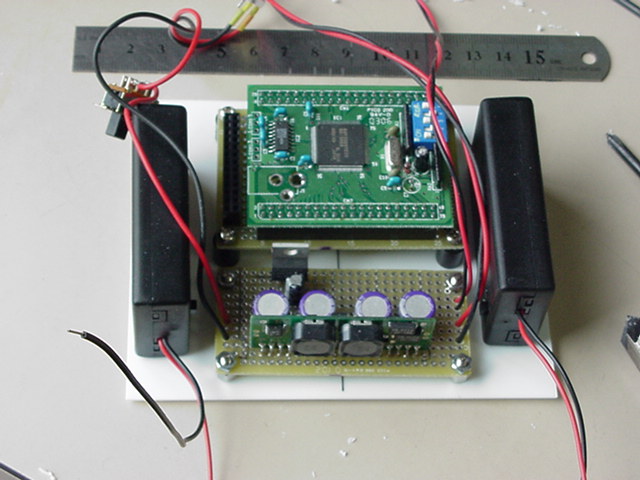
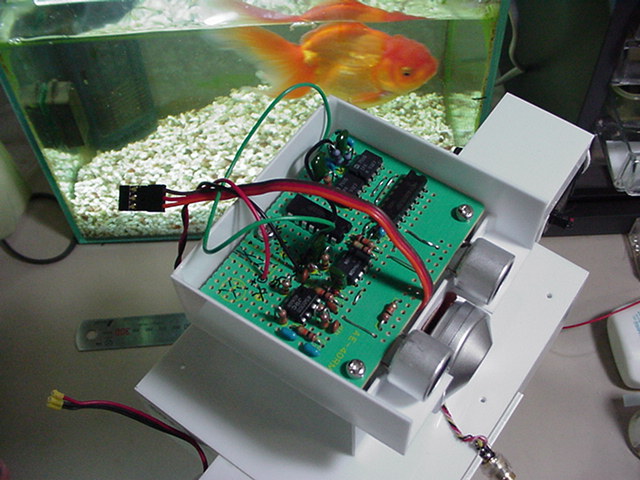
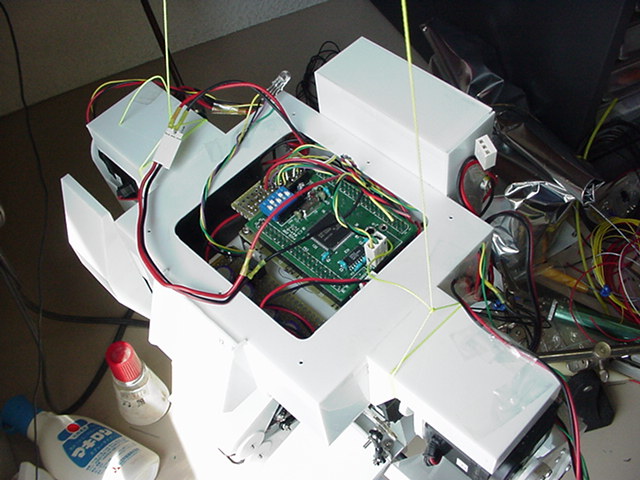
通信コネクタ
その両サイドのディップスイッチとタクトスイッチは、自律動作時のモード切替等に 使用するためのスイッチです。 右肩の後ろにあるスイッチは、電源スイッチです。定格が2Aのスイッチを最大5A 流れる回路につなぐわけですが、連続歩行状態で0.5A未満で、2Aを越える時間は 長くないと見積もっているのでOKのはずです。 |
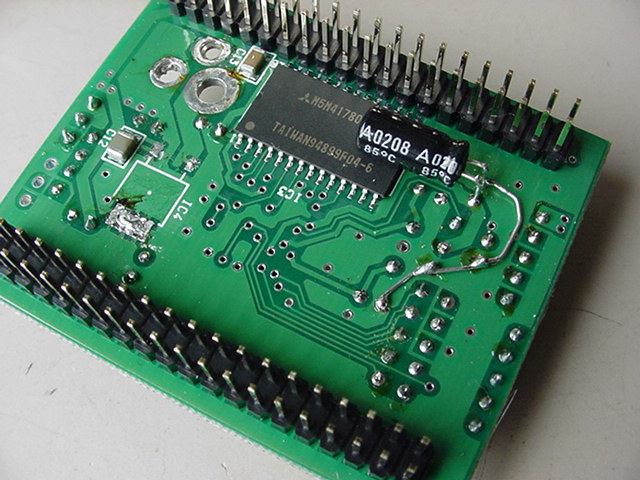 |
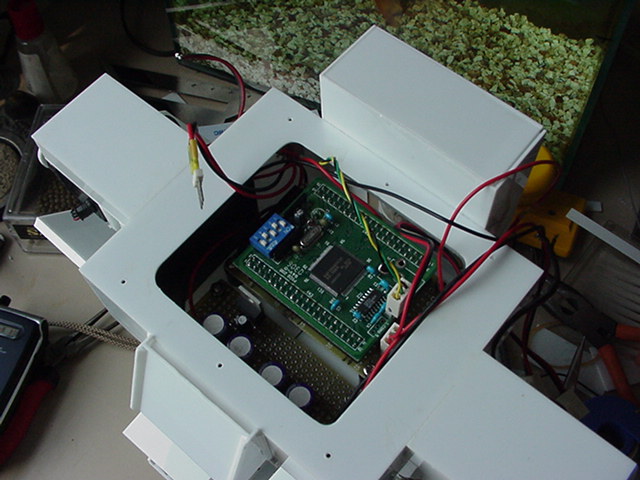
マイコンボード裏面
同じ時にもう1つ買ったキットもそうでしたが、 このキットも一部スルホールが通っていないと思われる部分があり、ジャンパ線で つないであります。(電解コンデンサのグランド側から出ているジャンパです) |
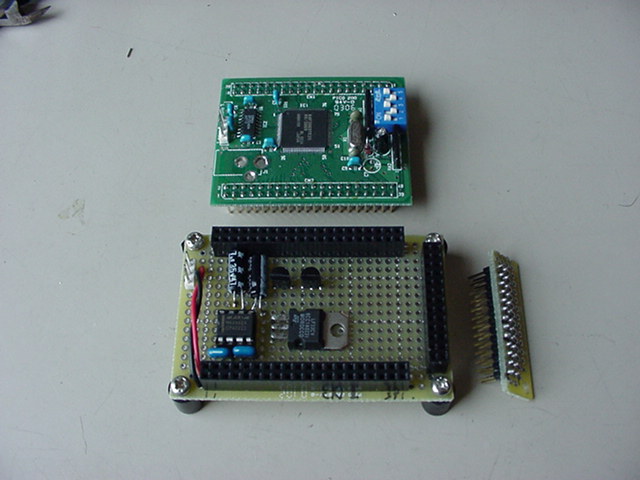 |
マイコンボード
|
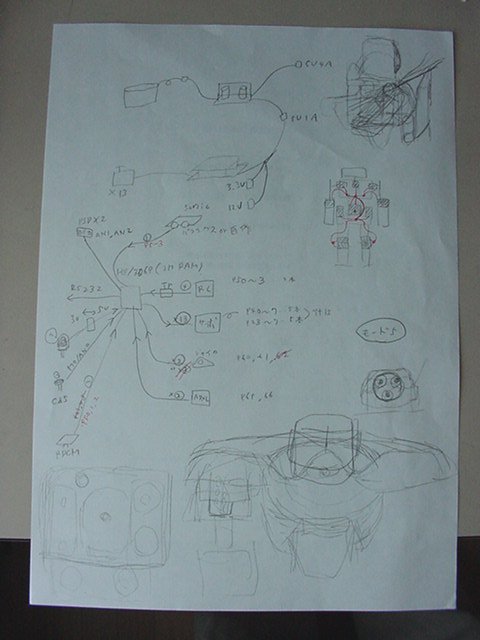 |
構想メモ(システムブロック図みたいなもの)
|
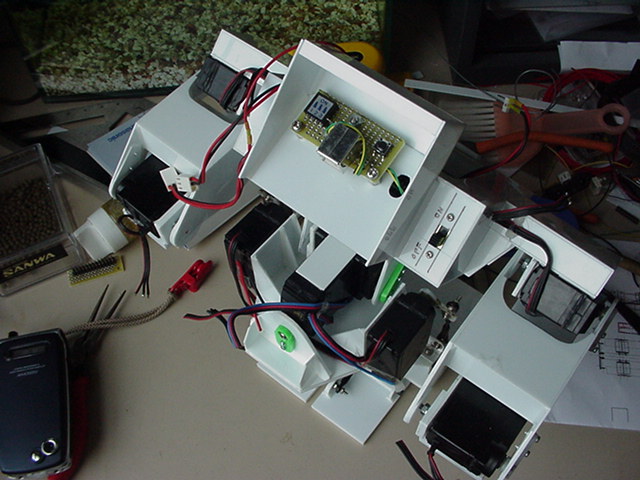
動力系統の配線
 |
配電基板
|
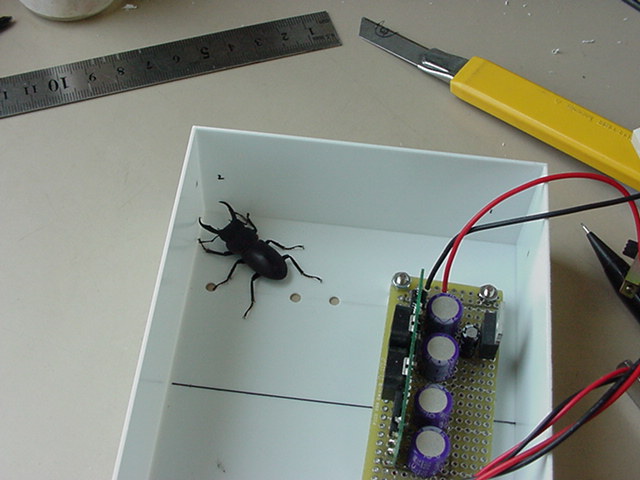
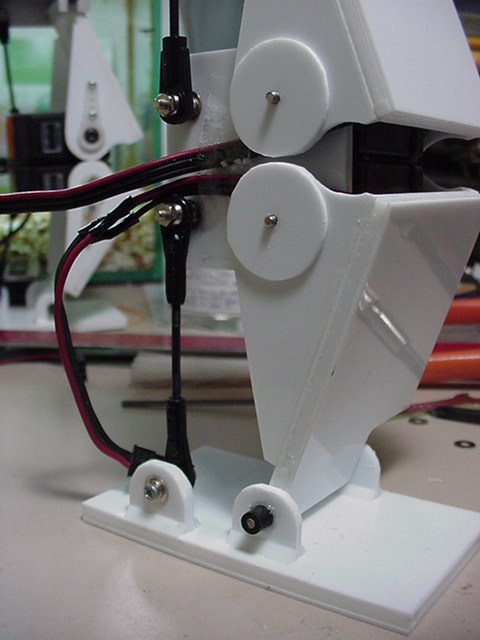
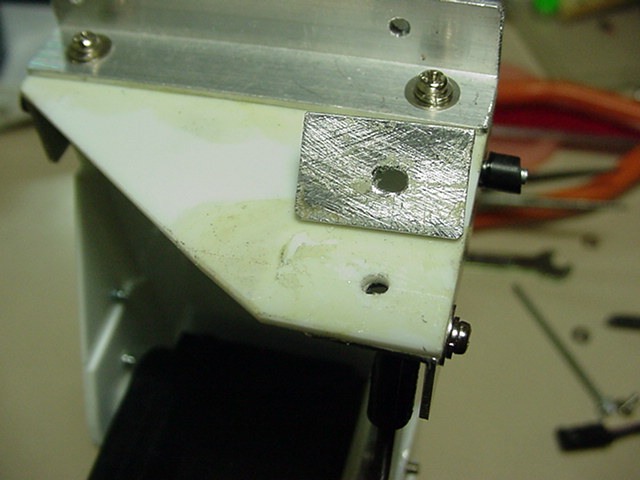
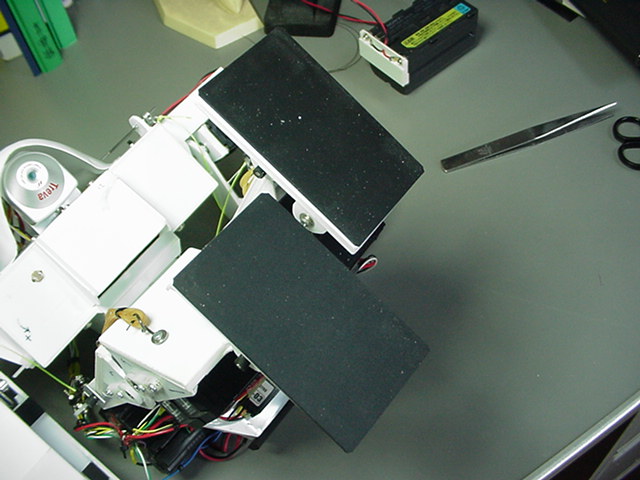
転落防止センサーの取り付け
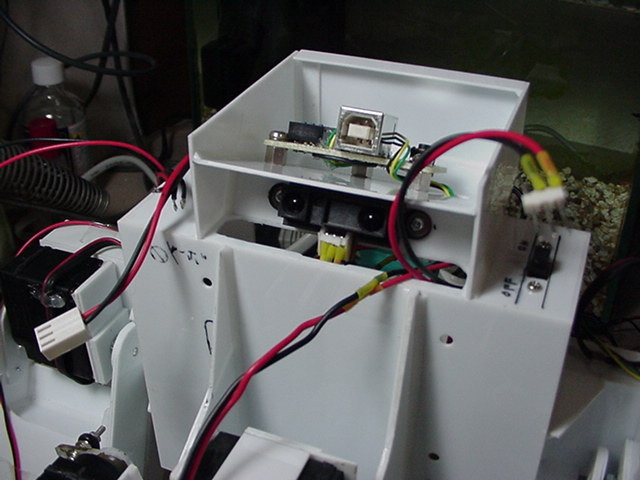 |
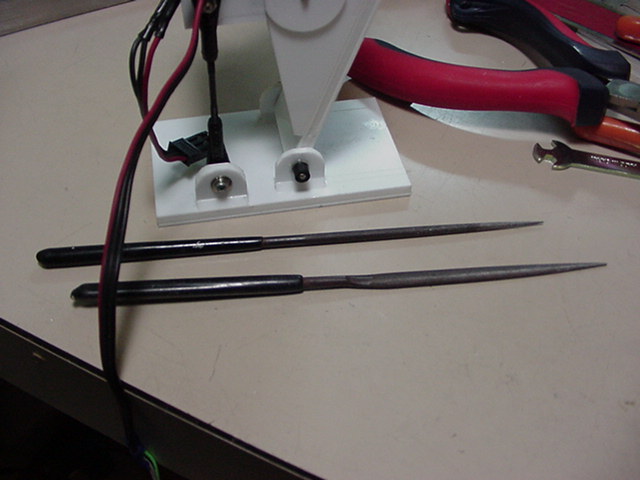
転落防止センサー
|
 |
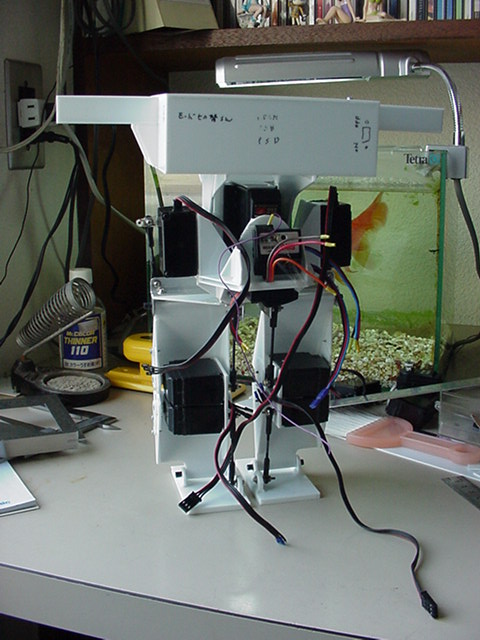
調整中のスナップ
|
 |
配線中のスナップ
|

SX-101(SRM-1301)は40個持っているので、使っていないモノからギアを
移植し修理しました。「RCサーボの機種選びを間違えた」様な気持ちが強くなってきました。
歩行のモーションは、ソフトの準備には手間がかかるものの、一度出来てしまえば 歩行のスピード調整などが簡単に出来るので、これまたいつものとおり、足先の 軌道を決めてから逆運動学計算をして、歩行モーションのデータを吐き出すソフト を作りますが、起き上がり他のモーション用には、いわゆる「モーションエディタ」 と呼ばれている、最近の2足歩行ロボットキットについて来るタイプのソフトを 準備しようと考えています。
ロボットとの通信フォーマットは、ソフトがW6v3の流用なので、W6v3と 同じです。(ハードが違うところは違います)
ファイルと構造体を作った後は、構造体にファイルの内容をセットするための ファイルI/Oルーチンを移植しました。
ちょうど良いバネがストックにあればいいのですが、多分無さそうです。また、必要な 張力が正確に分かるのは詳細な設計が済んだ後で、今は分かりません。よって、東京で買って帰る 訳にもゆかないので、特性が安定しないものの、入手しやすく、本数の増減で簡単に張力の 調整が利いて便利なので、輪ゴムを使う方向としました。
「カーソルキーを1回押すと、足先が2mm動く」といったテストプログラムで様子を見ました。 上記の関節パラメータファイル用の測定が甘いので 位置決め精度がイマイチな気がしますが、関数はOKの様でした。
測定方法がいい加減なのはおいておいても、かなりのバラつきがありそうだと 思いました。
以前、サーマルソアリング用のRCグライダーや、フリーフライトの ゴム動力模型飛行機を作っていた頃、ゴムひもはそもそも、伸縮 させるたびに変わってくると読んだ覚えもあるので、まあ、こんなところでしょう。
これからROBO-ONEの資格審査に通るために、 横歩き、旋回、起き上がりのモーション生成プログラム、 シーケンス再生プログラム等を作らなければなりません。残りの日数と自分の 作業スピードを考えると、資格審査にパスするところまで当日までに出来るかどうか 微妙なところだと思いました。
ROBO-ONEといえば、まだ審査結果が事務局より返信されていません。8/24 にその旨を申し出るメールを出したのですがまだ返信がないので、ちょっと不安に なってきました。(HPにUNIの写真が出てるので、申し込みは受理されているようですが・・・)
ところで、審査結果の返信の件ですが、迷惑メールの着信拒否にかかって消えていたことが 分かりました。「info@」で始まるアドレスから月に600通くらいのペースで迷惑メール が来るため、「info@」を着信しない様にメールボックスにフィルタをかけていました。 そこで、フィルタを一時止めた後、審査結果他の連絡メールを 再送していただきました。事務局殿にはお手数をおかけして、申し訳なかったです。
特に問題なく起き上がりができました。振り返ると、大会の準備期間に、両タイプを手に とって、ロボットに付けやすかったバッテリーボックスの方をとりあえず載せたのが運のつき だったなーと思いました。
 |
バッテリーボックス これが大会の当日に積んでいたバッテリーボックスとバッテリーです。 |
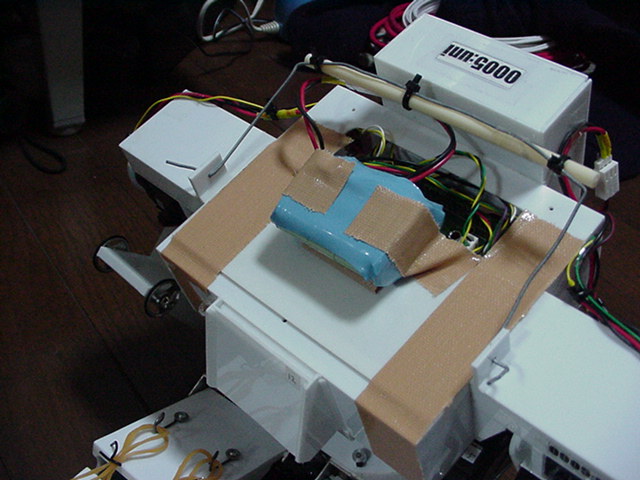 |
バッテリーパック これが2L2から流用したバッテリーパックです。 |
バッテリーが軽くなり、上半身の腰のロール軸周りの慣性モーメントが小さくなったので、 歩行の周期を早めました。上半身の動きを大きくする方向の変更もありえますが、腰関節の 可動範囲に余裕が少なく、脚腰のサーボのスピードに余裕があるので、今回は スピードアップを選択しました。 歩かせながらの調整ですが、結果的に10%ほど早めた所で 転ばなくなりました。
あとは、メーカーのHPから、面白そうなアプリケーションノートをダウンロードして 読んでいます。
 |
キットと本 |
ここまで書いて、「でも、2L2bはもっと乱暴に1歩で加速しても少し進路がそれる 程度だったっけ」と思い出し、その理由として腰関節から上のピッチ軸まわりの 慣性モーメントが2L2bほど大きくないことに思い至りました。そこで、腰のピッチ軸 サーボだけでなく、肩のサーボにもジャイロのフィードバックをしたところ、だいぶ 歩き出しが安定しました。でもこれは本筋ではないので、上記案1,2も実施の 方向で検討しています。
モーションデータを作っている途中で、腕を半分伸ばした状態で前に倒れてしまい、 右ひじのRCサーボのギアが欠けてしまいました。スペアのギアは1枚だけで売って いないので、全部新品に換えました。部品代は420円でした。
すると、地面から離れている方の足(遊脚相の足)が実際は、遊脚相として割り当てている
時間の半分ほど地面と当たってスリップしているのが見えました。原因を考えてみると
支持脚の関節の保持力不足に起因する偏差が大きく効いている様に思えました。
また、遊脚がスリップしながら接地している時と、接地していない時で大きさが
変わる支持脚側の偏差
が歩行を不安定にさせている様にも見えました。
そこで足にかかる荷重の変化が緩やかになる様、ほとんど遊脚の足が地面を離れない モーションを試してみました。それが今回のモーションです。ちょっとした床の起伏で 進路がそれたりと、あまりいいモーションではないですが、一応安定して進むので、 これはこれでOKかと思いました。歩いている様がクロスカントリースキーの人の 様に見えたので「クロカン歩き」と呼ぶことにしました。
「05.11.06」の所で触れた「案1:歩き出すときは上半身を前傾させる」も入れてみました。 歩き出しの安定がよくなりました。ついでに腕も振るようにしました。
 足裏の写真
足裏の写真
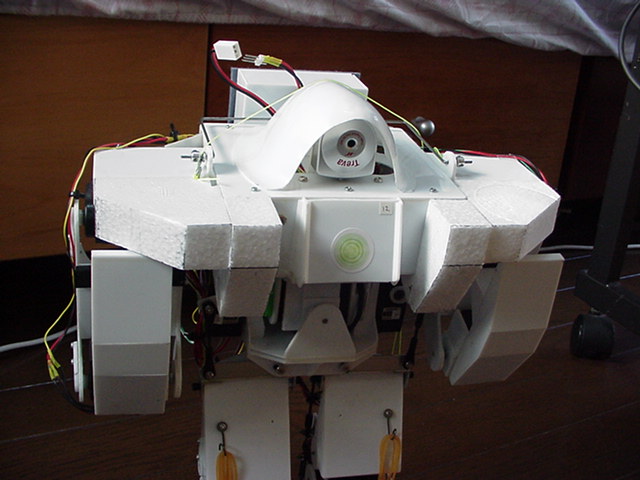
肩の上にもゲームやアニメのロボットのように板を立てたかったところですが、首を付けたとき に、カメラの視界の妨げになるので、肩より上はフラットにしました。
|
バンパー 形を全体の雰囲気に合うように考えました。 |
|
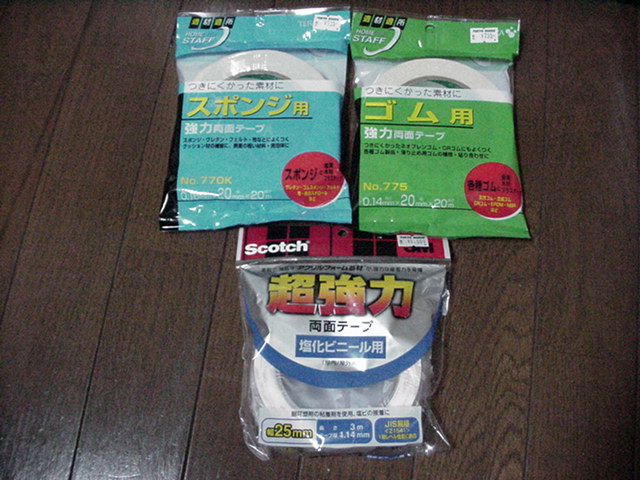
両面テープ 発泡スチロールの貼り付けには「スポンジ用」と書いてある両面テープを使いました。 (パッケージには「発泡スチロールもOK」と書いていあります) |

|
カッター 発泡スチロールの切断には、電熱線のカッターを使いました。接着面の平面がよく出るように 発泡スチロールの板を金属製の定規で挟んで、定規をガイドとして使いました。 |
PC側でデータを受け取るプログラムは、csv形式のデータを ディスクに落とすように作り、結果を表計算ソフトのグラフ機能で様子を見てみました。 下の測定例は足のスリップを抑えた歩行モーション のものです。サンプリング周波数はRCサーボのPWMパルスの周波数と同じ50Hzです。 (約6秒強の時間サンプリングしてプロットしてあることになります。)
メモリーはひとまず128kbyteのエリアをモーションログ用として割り当てました。 加速度、角速度それぞれ1データ辺り2バイト(16bit)でエンコードしていますので、 約5分27秒の間データサンプリングが継続可能となります。
ところで、この機会にソースコード等を見ながらメモリマップを清書しましたが、なかなか 手間でした。いいメモリ管理の仕組みがあればなー等と思いました。
加速度測定サンプル
角速度測定サンプル
転倒時のログ
ピッチ軸方向の角速度が「 PG03 ch1(pitch)」、前後方向の加速度が「ADXL ch0(X)」そして ピッチ軸方向の角速度の積分値(角度)が「sum(pitch)」です。以下のように読みました。
転倒判定については、「状態の継続」の判定を確実にするのはプログラムが面倒なので、加速度 センサの出力値を ローパスフィルタの式に通して、その結果についてある瞬間の値が一定以上である ことを以って「転倒」としました。ちなみに関連する辺りのソースはこんな感じです。 フィルタについては一時学生の頃凝っていた様なおぼろげな記憶が有るのですが、ほとんど、 容易に思い出せそうも無いほど忘れているのがちょっと悲しかったです。
adxl_gain = (float)0.2;
/*ADXL202の読み取り*/
if(switches.adxl_on == 1 && fall_over == 0)
{
read_adxl(&sio);
/*ローパスフィルタ処理*/
for(i = 0; i < 2; i++)
{
adxl_data_f[i] = adxl_data_f[i] +
((float)sio.adxl_data_s[i] - adxl_data_f[i]) * adxl_gain;
/*転倒判定*/
if(adxl_data_f[i] < - 300.0 || adxl_data_f[i] > 300.0)
{
fall_over = 1;
}
}
if(fall_over == 1)
{
action.sequ_count = 0;
action.count = 0;
}
}
ロボットの挙動から総合的に判断すると、スタックの内容が壊れたりが起きているような感じ がします。コンパイルでエラーは出ませんが、ポインタの操作とか型キャストあたりで、何か まずいことを気が付かないうちにしているみたいです。
チェックライトを色々な場所に入れて、どこで変数の内容が壊れるのか見ていくと、ある関数に
制御が移った時点で、引数として渡す構造体の、その関数では触らないメンバが書き換わるのが
分かりました。色々試した結果、そのメンバを別の構造体に分けたら壊れなくなりました。
ここまでの範囲から判断すると、構造体が大きすぎたせいの様な気もしますが、ホントのところは
良く分かりません。でもまあ動くようになったので、このまま進めます。
W6を動かした今までの感触で、ROBO-ONEのロボットのように、金属光沢のある 板で出来ている物は、PSDセンサーでうまく検出できないのが分かっているため、 ROBO-ONE用にはあまり向かないとは思いますが、自律モードプログラムを書くために なにかしら距離センサーの類が必要なので、ひとまずPSDでプログラムを書いて、センサー はセンサーで後で検討します。
uniを見ながら「自律格闘モード」を実現するにはどうしたらいいか 考えました。自律型の相撲ロボを参考にしながら考えましたが、ROBO-ONEの方が ルール、発生しうる状態の判断、ロボット自体の制御などがみな複雑で、すぐ実現できる気が しないので、実機を使って課題のリストアップから始めようと思いました。
今日のところは以下のようなことを考えました。
|
外周の線の意図
Tマークの意図 |