書きこみ順は、古い物から新しい物の順です。
06.01.01
状態表示LED関連プログラミング
マイコンのプログラムの整理のついでに、ロボットの起動以降のフルカラーLEDの
表示状態の遷移についても整理しました。以下はマイコン起動からロボットが歩き出すまで
の流れに沿って書いたものです。
- 起動直後:赤点滅
- <<タクトスイッチONでジャイロキャリブレーションスタート>>
- ジャイロ キャリブレーション中:紫
- キャリブレーション後:緑点滅(シリアル通信 コマンド応答可能)
- モーションデータロード中:モーションIDの下3ビットの数字の色で点灯
- <<タクトスイッチONでRCサーボ制御信号スタート>>
- 以降バッテリー電圧により変化:
- 7.0V以上:青点灯
- 7.0V ~ 6.5V:緑点灯
- 6.5V ~ 6.0V:紫点灯
- 6.0V ~ 5.5V:赤点灯
- 5.5V以下:赤点滅
この状態でここしばらく動かしています。バッテリーの電圧で色が変わるのは、なかなか便利
です。動けなくなるのは「いきなり」な感じなので、元気に動いていても、もうすぐ無くなりそう
だと分かるのが良いです。また、起き上がりなど、負荷の大きなモーションの実行中に
電圧が下がり、その後、電圧が戻るのに何秒かかかっているのが見えるのが面白いです。ちなみに
、バッテリーの電圧チェックは1秒間に2回の頻度で行っています。
06.01.15
gccの練習
先日H8のCコンパイラではまったので、今後自律モードのプログラムを大きくしてゆくに
あたって、このまま行けるかどうか考えています。
その過程で1年ぶりにgccのことを思い出しました。そこで、H8/3069F LAN付きキットに
付いて来たgccが使えないものかと、試しに、uniのLEDを点灯させるプログラムを書いて
みました。なんだか状況が良く分からないのは、今まで使っているコンパイラと同じです
が、一応動きました。今uniには日立のモニタが入っていますが、このモニタとも
一緒に使えそうです。
- コンパイルするシェルスクリプト
h8300-hms-gcc -mh -T ram3069.x -o test.coff -nostartfiles ramcrt0.S test.c test_sub.c
h8300-hms-objcopy -O srec test.coff test.mot
- test.c
#include "reg3067.h"
void switch_LED(unsigned char data);
main(void)
{
unsigned char i;
PADDR = 0xff;
while(1 == 1)
{
switch_LED(6);
}
}
- test_sub.c
#include "reg3067.h"
void switch_LED(unsigned char data)
{
PADR = data;
return;
}
- ram3069.x
OUTPUT_FORMAT("coff-h8300")
OUTPUT_ARCH(h8300h)
ENTRY("_start")
MEMORY
{
ram(rwx) : o = 0x400400, l = 0x1800
}
06.01.22
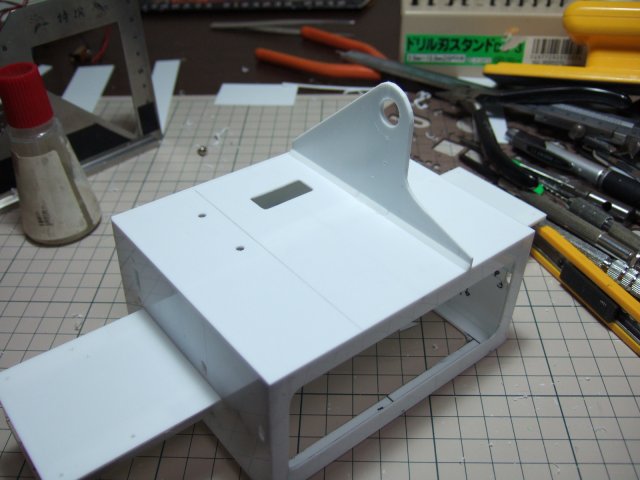
腰部のカバー
腰の後ろに付いている、動力系電源の中継基板が「むきだし」なのが気になってきたので
カバーを作ってみました。工作用紙で作りました。あとで塗装をするか、0.5mm厚の
プラ板で作り直すか等しようと考えています。


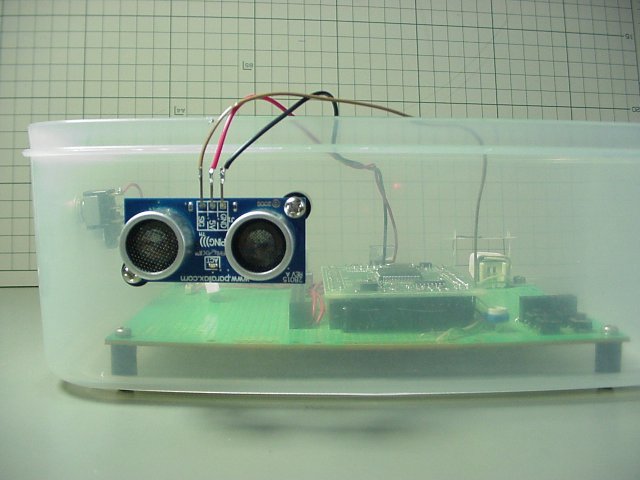
超音波距離センサ(PING)の動作確認
ロボットに積んでから不良などで使えないことに気が付くと「切ない気持ち」になってしまうので、
単体でH8/3048用マザーボードキット(4L1に積んでいたもの)につないで
動作確認しました。ちゃんと使えました。(今つけているマイコンボードはH8/3052Fのものですが)
テストに使ったプログラムのソースコード


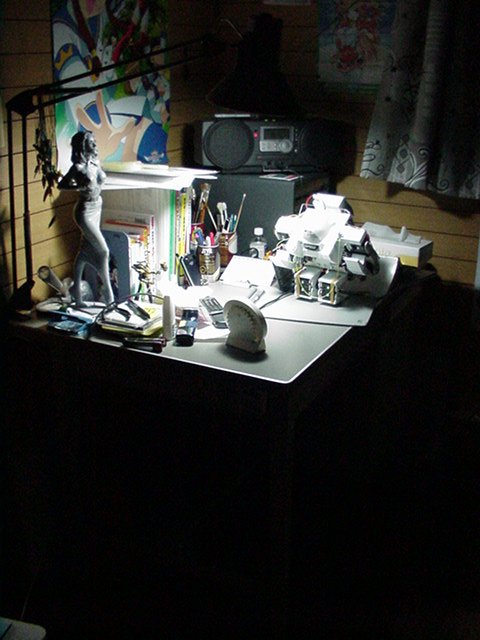
Trevaのテスト
ROBO-ONEのリングなど、周囲が薄暗く、立っている場所はスポットライトで照明
されているような場所でどう写るのか確認するため、部屋を暗くして、机の上のZライト
だけで照明して撮影してみました。
06.01.29
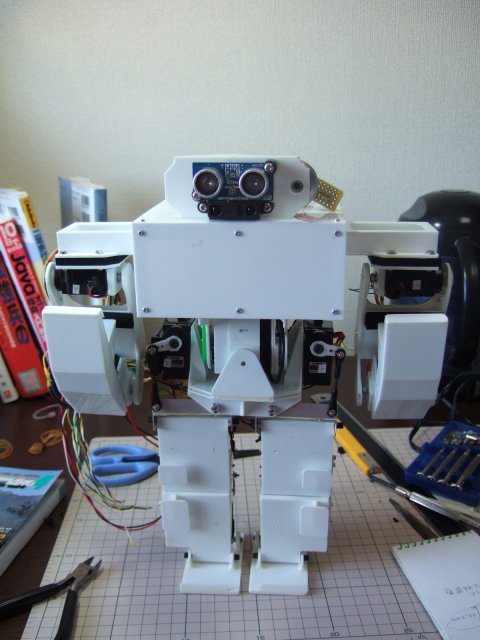
頭の製作(機械工作)
06.02.05
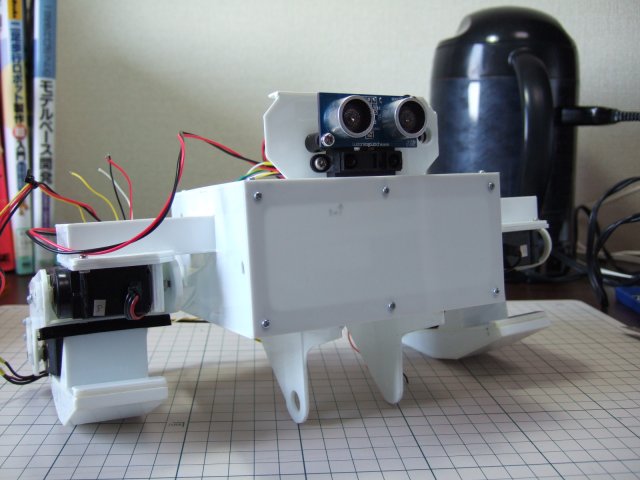
頭の製作(電子工作)
カメラ、加速度センサ、超音波距離センサ、赤外線距離センサ、首振り用RCサーボの
配線を行い、動作確認をしました。
ジャイロの追加
直進中に足のスリップで向きが変わってしまった場合の角度と、旋回時の角度を検出するため
、ヨー軸にジャイロを追加し、インターフェイスソフトも直しました。
06.02.12
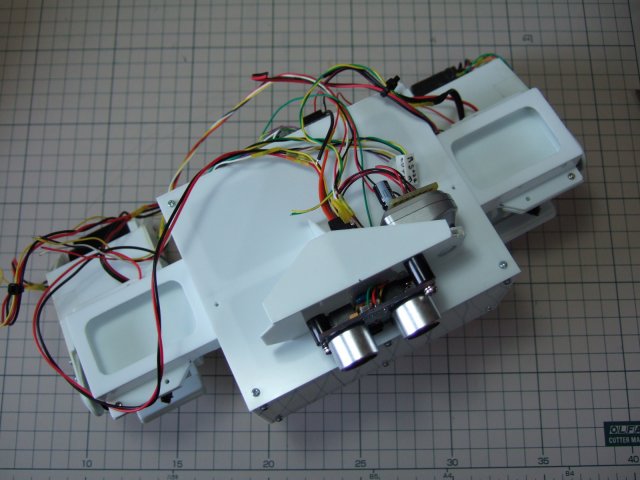
180度サーチ
頭を10刻みで180度動かし、超音波距離センサと赤外線距離センサのデータで、
レーダーチャートを作れるようにしました。先週の更新の後で、首を横に向けると
取っ手用のアイプレートにセンサーのレンジが遮られることに気づき、頭の位置を
15mm上に上げました。赤外線のほうは180度のレンジが確保できましたが、
超音波のほうは、「肩の先」が検出されてしまい、レンジは実質120度程度と
なってしまいました。頭の位置がまだ低いようです。
自律移動プログラム
上記サーチの情報から、見つけた対象の方を向き、一定距離まで近づくプログラムを
作りました。攻撃コマンドが「格闘」しかないところが物足りませんが、「カルネージハート」
のプログラムみたいで楽しいです。
06.02.19
自律移動プログラム
ごく簡単なパターンですが、動くようになりました。あらかじめセットした30秒とか120秒
とかの間、180度サーチ → 方向転換 → 移動 → 攻撃 のサイクルを繰り返します。
RCサーボのPWMパルスを作りながら、自律移動の関数を少しずつ進めるプログラミング
に苦労しました。
環境はROBO-ONEリングを想定していますので、uniの背の高さ程度のものは
リングのポールと相手ロボットしかないものとして、レーダーチャートに反応が出たものの
一番近い物に近づいてゆきます。できれば、ポールとロボットの区別はつけたいと考えています。
 試験用のターゲット
試験用のターゲット
超音波は来た方向にきれいに反射し、近赤外線は乱反射するように材質、形状、寸法を考えて
製作しました。
06.02.26
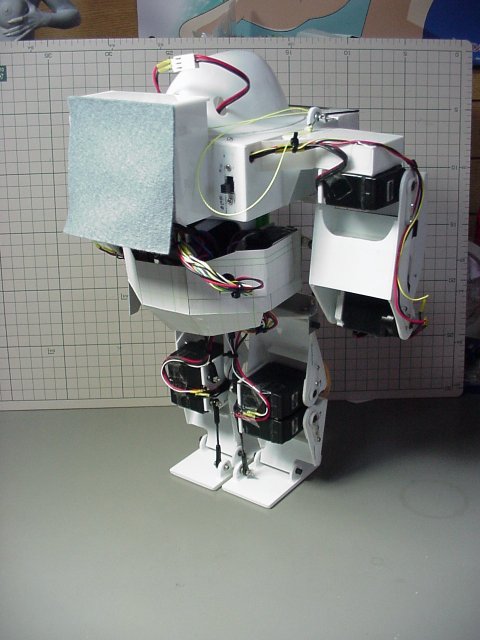
ヒザ関節をロックするモーション
自律モードで
180度サーチを行うとき、時々、床面の状況などにより、足がきれいにそろっていない状態で
RCサーボ脱力に移行し、転倒するケースがしばし発生したので、脚が立った状態でロックされる
様な姿勢に移行するモーションを作り、180度サーチは、この姿勢に移行してから行う様に
変更しました。
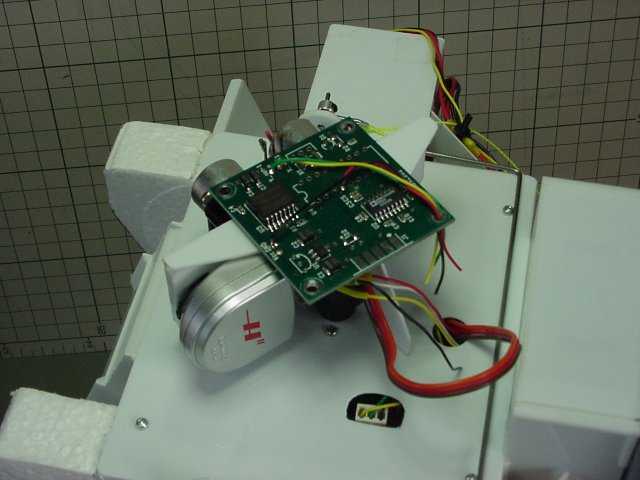
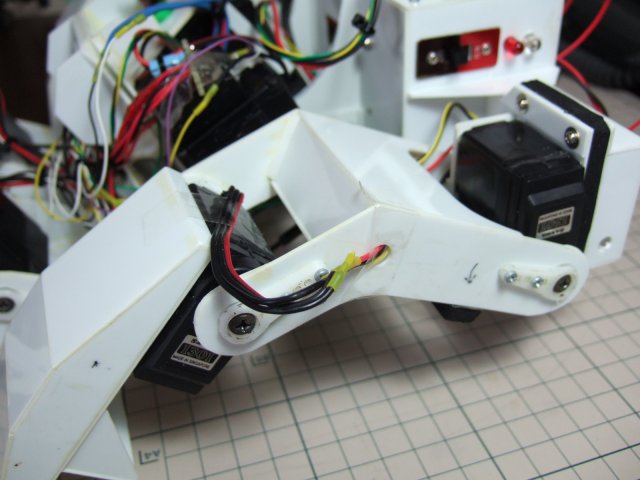
 写真1:平行リンクが垂直になる姿勢で、RCサーボのギアの抵抗で倒れないようにしています。
写真1:平行リンクが垂直になる姿勢で、RCサーボのギアの抵抗で倒れないようにしています。
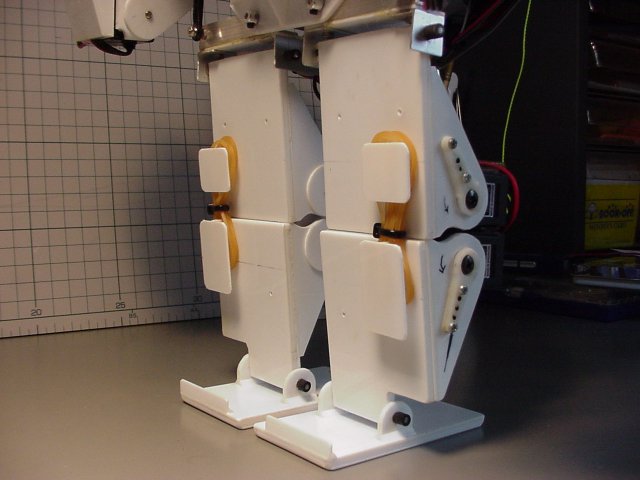
 写真2:関節の稼動範囲の端で、リンク同士を干渉させて、機構的にロックします。
写真2:関節の稼動範囲の端で、リンク同士を干渉させて、機構的にロックします。
仰向けからの起き上がり
自律モードで転倒したときの復帰に使おうと、仰向けからの起き上がりモーションを作りました。
パワーアシスト輪ゴム取り付け部の工作
張力の調整が容易なように、フックはピアノ線を曲げて作ったものを使っていました。
当面調整の必要も無いので、デザインの整合性をとるため、プラスチック製のフックを
接着固定しました。

06.03.05
距離センサの調整
自律モードでターゲットを探すときに、超音波距離センサと赤外線距離センサの使い分け
をする部分のコーディングを行いました。300mmを境に、それより近ければ赤外線、
遠ければ超音波の距離センサを使うこととしました。
家の中の色々な場所で試してみると、ターゲットを見逃す場合が多いことが分かりました。
そこで、調べてみるとサーチのときに赤外線を使い、ターゲットを探しながら、動いている
時は超音波を使うなど、
整合が取れていない部分があったので、修正しました。
スペア・パソコンの準備
ROBO-ONE会場への持込用に、スペアとして時々使っているMMXペンティアム233
でWin98の旧いノートPCに、uniの開発環境をセッティングしました。
06.03.12
自律モードのテスト
引き続き、試験用ターゲットを探して倒す動作の成功率アップのため、ロボットとターゲットの
位置関係や、環境を色々変えて動かしてみました。
はじめに180度サーチを行ってから、
見つけた方向に方向転換をはじめ、距離センサから見つけたターゲット
までの距離と近い数値が来たら旋回終了というアルゴリズムで動かしていました。
しかし、180度サーチの時と、旋回動作の時とでは、距離センサの測定条件
(サンプリングの密度と、ターゲットとの角度)が異なり、ターゲットの方向を行過ぎる場合が
多い事が分かりました。旋回終了条件に無理があるようです。
旋回終了条件の変更
上記不具合の改善策として、先日搭載したヨー軸のジャイロの積分値で、目標の方向まで
旋回を完了したか判断するように変えました。これはなかなかうまく働きました。
ヨー軸ジャイロの積分値グラフ(旋回動作中)
このグラフのような形で、旋回運動が検出されました。このグラフで縦軸の18000は、約90度
に相当するので、プログラムで、例えば90度旋回したいときは「積分値が18000を超えたら
旋回モーション停止」等とします。
このグラフでは約3歩で90度左旋回しています。少し下に下がっている部分は、脚を踏み出
すときにスリップして、右に進路がぶれています。
画像管理機能の追加
自律モードで画像認識を行うための下準備の一つとして、33フレームの画像を、マイコンボード
搭載のメモリーに記録できるようにしました。また、記録した画像を、PCに一括してダウンロード
する機能や、PCで画像のIDを指定して画面に呼び出す機能などを作りました。
テストとして、自律モードの時に、180度サーチでターゲットと判断した物を撮影する様に、
マイコンのプログラムに手を加えました。
 ->
->
 ->
->

ターゲットに近づいてゆく様子
ちなみに33フレームの内訳は、フレーム0(ID0)は記録に残さないワーク画像です。
フレーム1から32(ID1から32)は、フレーム間の関係を見るために記録に残す画像です。
06.03.25
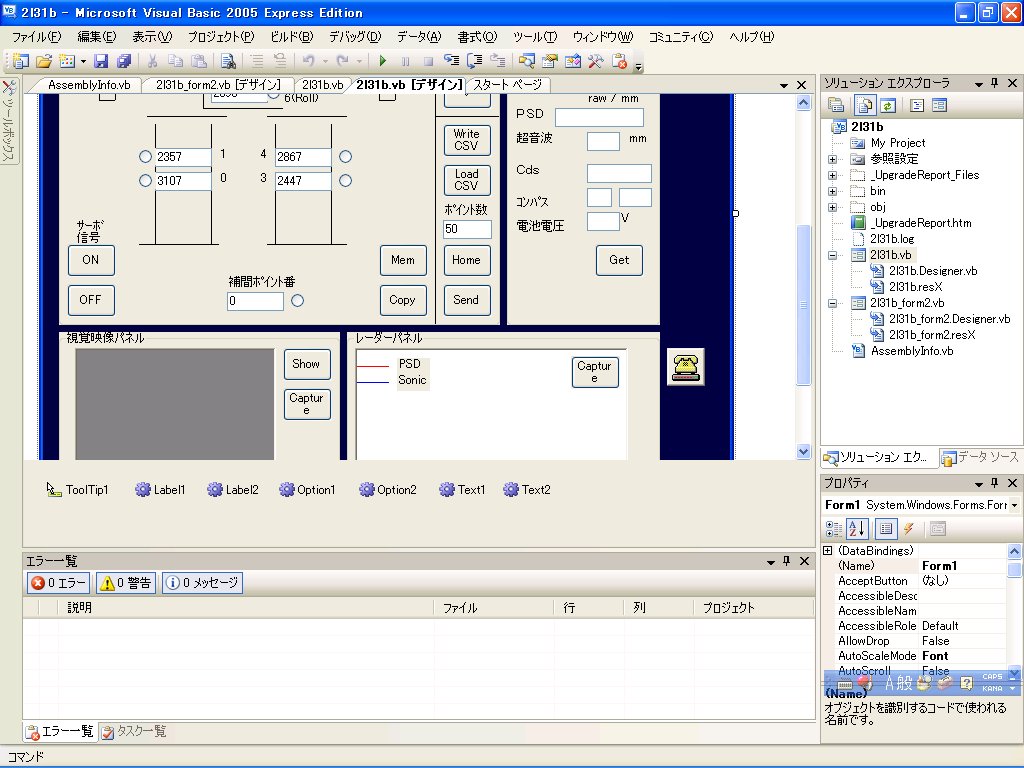
VB.NET(VB2005)への移行
いろいろと本を読む限りでは、それほど自分のロボットにメリットがあるようにも思えなかった
のでVB6を使い続けていましたが、最新版はフリーになったので「日経ソフトウェア 2006年
3月号」に付いてきたVB2005とC#2005(両方ともExpress Editionです)
をインストールし、uniのVB6の
プログラムをVB2005に移植しました。
自動的な変換は完全には出来ないと読んでいましたが、そのとおりでした。
uniのプログラムの場合は、変数の宣言(宣言しないといけなくなった)と画面に線を引くとき
のやり方を変える程度で移植は完了しました。「なんだかC++に近づいたなー」という印象
を持ちました。
一番ハマルのではないかと懸念していた、ロボットとのシリアル通信関係は、基本的に
自動変換で済み、良かったです。実質半日ほどで移植が完了しました。
プログラムの起動/実行速度は落ちますが(Windows3.1で買ったマシンにWindows98を入れた
ときくらい?)、プログラミング環境が進化しているので、今後はVB2005を使おうかと思いました。
オンラインマニュアルを読んでも線の引き方が分からなかったので
「VB.NET基礎学習Bible」という本を買って参考にしました。
06.04.09
歩行モーションのデータ構造統一
プログラムの高速化
20msecのループの中にセンサの処理等のコードを足してゆくにつれ、ループが20msecでまわりきらない
ケースが出てきたので、プログラムの高速化を考えました。モーションデータ切り替えを行う関数
が冗長なコーディングだったので、速さ重視のコーディングに変えました。
上記のデータ構造変更との相乗効果で、だいぶスッキリしました。(関数名はaction_decodeです)
変更前のソースコード
変更後のソースコード
動作の効率化
歩行モーションの切り替え時に、必ず一度ヒザを伸ばしてから、あらためて少しヒザを曲げて歩き出す
様になっていて、時間的に無駄だったので、不必要にヒザを曲げ伸ばししないように、プログラムを
変えました。(元々は、自律モードのプログラムを簡単にするために、毎回初期姿勢に戻していました。)
06.04.16
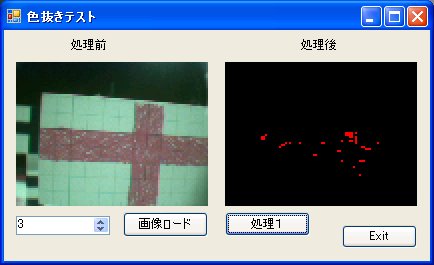
画像処理(赤い部分の抜き出し)
歩行サイクルの調整
新しいデジカメ(FUJI FILM FinePix F11)
を買い、640*480 30フレーム/秒で撮影できるようになったので、歩いている
様子を撮影してコマ送りで観察してみました。すると、歩行中に立脚相の足の外側の辺が
地面から浮いているのに気がつきました。この上半身の振り範囲では、サイクルの時間が
長すぎる様です。そこで、モーションのポイント数を半サイクルあたり18ポイントから15
ポイントに短縮しました。すると歩行がより安定して見えました。(ちなみに1ポイントの
再生時間は1/50秒です)
その他、歩き始めに進路が逸れると感じていましたが、よく見ると「はじめの一歩」では無く、
「定常歩行」に移る時に足が滑っていました。「はじめの一歩」の加速の仕方に問題が
あるようです。
他に旋回モーションを新しく作るときも、コマ送りでチェックしながらデバグを行いました。
カメラの画面でコマ送り確認が出来るので、モーションデータがうまく繋がっていない時など、
どのタイミングで狂うのかを見つけるのにとても便利でした。(ある瞬間にすべての関節が
どっちに向かって動いていたかをじっくり確認できます。)欲を言うならば、1秒間に
200フレームくらい撮影できると、もっと便利なのにと思いました。
制御システムのグレードアップと上半身の新作
「タッチセンサーを沢山付けたい」と思ったのですが、もう空きポートがほとんど無い
ので、サブCPUを付けて拡張することにしました。配線が完全にやり直しになるので、
新しい構成できれいに収まる上半身の構造を作り始めました。
|
2006.04.16:分解
|

|
2006.04.16:新しい胸の箱構造
|
転職先の初出勤の日までに時間が開きそうだと思ったので、本格的に改造をはじめました。
しかし昨日、実はすぐに引っ越さなければならない
スケジュールだと分かりました。そんなわけで、この先しばらくは、バラバラのまま
作業中断になりそうです。
06.05.07
メインCPU I/Oボードの検討
歩行に関連するI/OをサブCPUにまとめる方向です。歩行の高速化の観点から言うと、
関節位置の更新サイクルが1秒間に50回では足りない気が最近していますが、今回は変えない
予定です。RCサーボの位置情報は、今までどおり50回/秒のペースでシリアル通信によって
メインCPUからサブCPUに送ります。通信速度は、W6で試して問題ないことが確認できている
38400bpsから始めます。
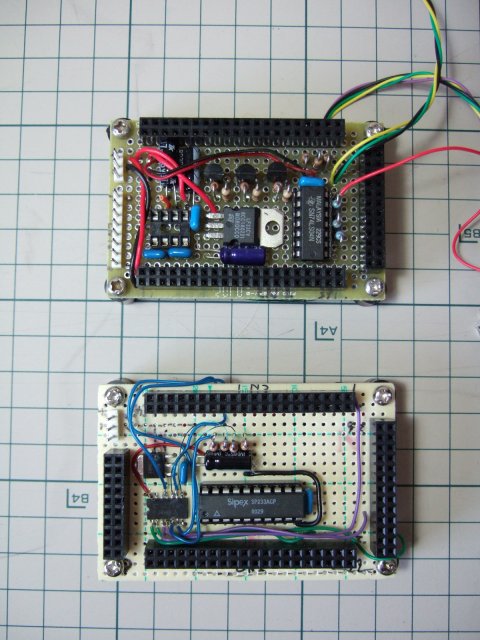
メインCPU I/Oボード(2006/05/07版の表示)
No.1サブCPU I/O結線図(2006/05/07版の表示)
回路図を描いていてふと、メインCPUのピンが空くな~と思い、有効活用について考えました。
メインCPUは相変わらず50回/秒のサイクルのループを使うので、処理能力が不足気味です。
簡単なスピードアップ策として、H8マイコンボードの外部RAMのデータバス幅を8bitから
16bitで使うように変えようと、
秋月で、メインCPUのマイコンボードに元から付いている16MbitのDRAMと同じ機種のDRAMを
買いました。1つ300円でした。久しぶりにメモリチップを単品で買いましたが
「ずいぶん安くなったなー」と思いました。
外部RAMを8bit幅のデータバスで接続しているSH2よりも、体感速度がむしろ速くなるのでは?
と期待しているのですが、さて、どんなものでしょう?
06.05.14
胸の構造の製作
転居先で工具類の荷解きまで完了したので、06.04.16の続きをはじめました。
肩の部分と、腰のピッチ方向のRCサーボの軸受け部分を作りました。

|
乾燥中
腰ピッチ軸の軸受けの板を接着しているところです。板を支えている「三角形の部品」は
板が直角に立つように仮付けしてあります。
(あとで簡単に外れるように端だけ接着してあります)
|

|
穴あけ加工完了
RCサーボの出力軸を通す穴と、サーボホーンを固定する穴の加工が終わった
ところです。上の写真で仮付けしてあった「三角形の部品」は撤去済みです。
|
06.05.21
胸の構造の製作
06.05.28
メモリ増設の下調べ
06.06.04
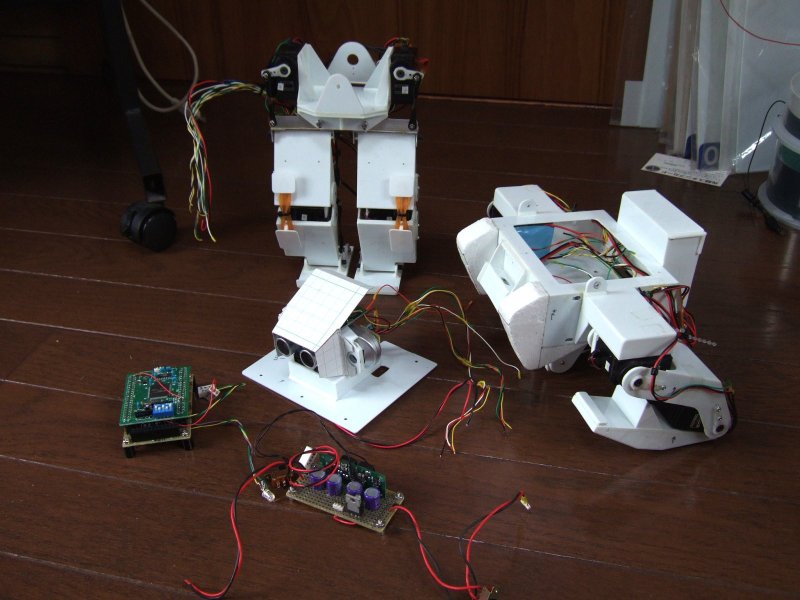
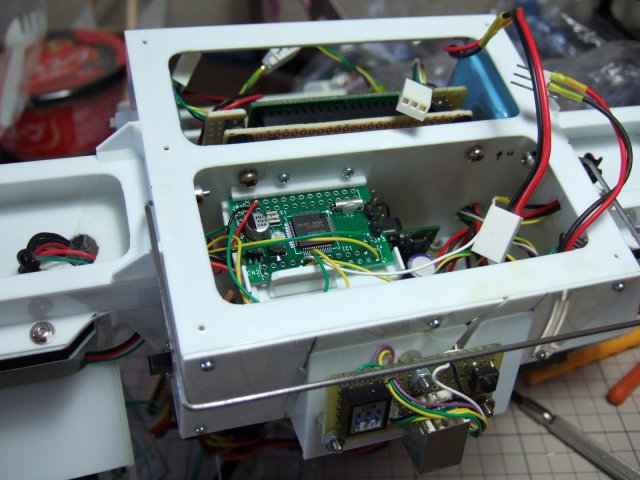
No.1サブCPUの取り付け
06.06.11
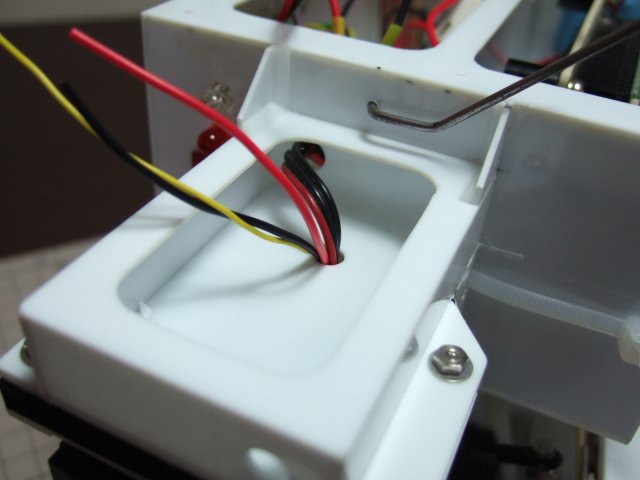
No.1サブCPUの配線
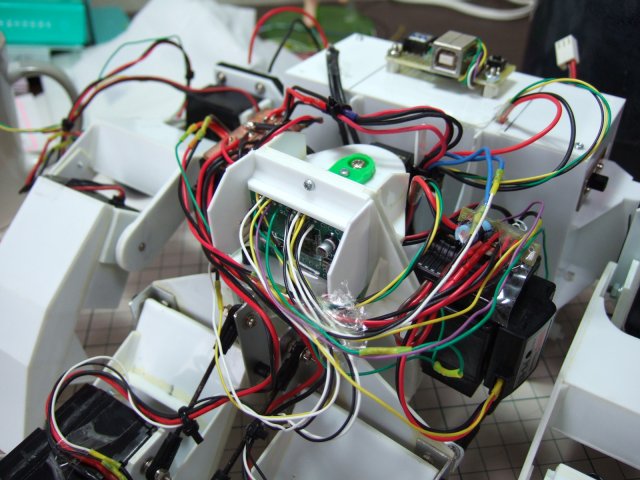
下半身のRCサーボと、ジャイロの配線作業を行いました。当初の意図のとおり、
腰関節をまたぐ配線の本数は少なくなったのですが、やはり腰の周囲の配線が
「ぐちゃぐちゃ」な感じなので、何とかしたいなーと思いました。

|
No.1サブCPUの配線
|
06.06.18
No.1サブCPUのプログラミング
簡単に言うと以下の機能を持ったプログラムを作りました。(メインCPUのふりをして
No.1サブCPUと通信する、PCで動くテスト用プログラムもVCで作りました。)
- RCサーボの信号を作る
- ジャイロの信号を読む
- タッチセンサの状態を読む
- メインCPUと通信する
機能を絞ったので、通信のコマンドはRCサーボ、ジャイロの信号そして
タッチセンサの情報をやり取りする
ためのものと、RCサーボのPWMパルスのON/OFFをするものの2つだけです。
(ちなみにW6のサブCPUには20個ほどのコマンドがあります。)
後日、各RCサーボの現在の角度を、ケース内のポテンショメータから電線を引き出して、
A/D変換してメインCPUに返せるようにするかは検討中です。
はじめはRCサーボをP80~P87に接続していました。プログラムが一応形になって、
ロボットに通電してみるとRCサーボが振り切りました。2時間ほどいろいろ
テストしたところ、P86をHighにすると、他のピンにも信号が出ていることが
分かりました。現象は分かりましたが、原因が分からなかったので、この件は
ひとまず放っておいて、8個のうちの4個のRCサーボの接続先をP50~P53に
振り替えました。
06.06.25
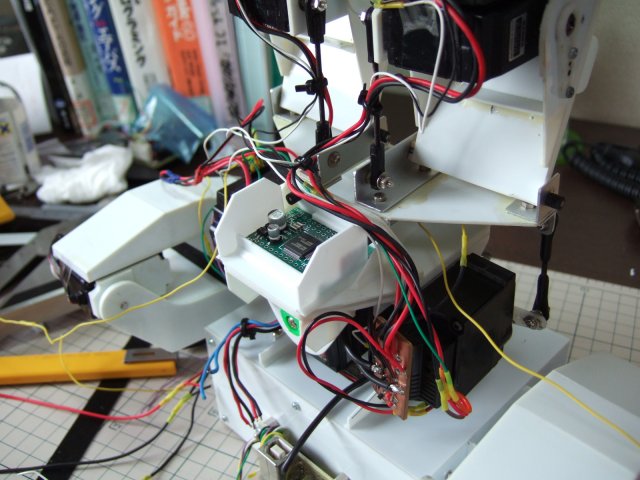
メインCPU I/Oボードの配線
いつもの調子で配線作業を進めました。先日のプレステコントローラのテストでうまくいったので、
3.3V/5V信号変換に74VHCを使いました。(旧基板ではトランジスタのレベル変換回路
を使っています。)フラットパッケージしか手に入らなかった
ので、ヘンテコな付け方になっています。

|
I/Oボード新旧比較
|

|
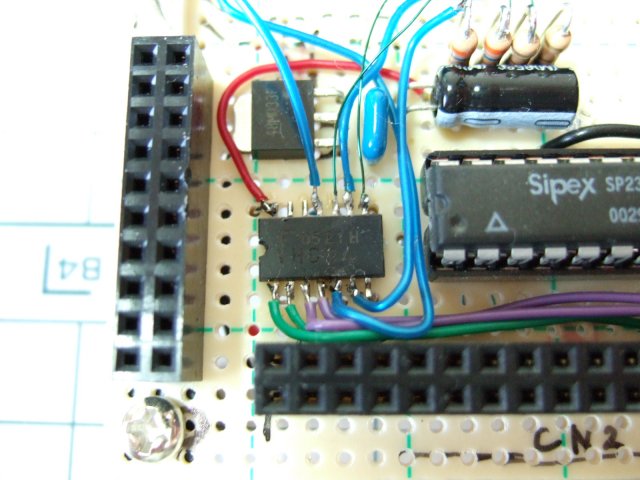
74VHC04周辺
ハーフピッチの変換基板を使うとかえってDIPパッケージのICを使ったときの面積より
広くなり、なんか納得がいかなかったので、直に半田付けしてしまいました。
|
ロボコンマガジンNo.46のROBO-ONEテクニカルレポート
「ひざのダブルサーボ化」説明を読むまで、スピードアップに効果大であることに
気がつきませんでした。(関節の可動範囲を広げるには良いかな?と思っていました。)
uniは、RCサーボの数を減らすために平行リンクを脚に
使い、結果的にひざをダブルサーボ化したのと同じ様になっています。「2L1と
同じRCサーボなのに、足先の追従性がえらく良いなー」と感じていましたが、
納得しました。
06.07.02
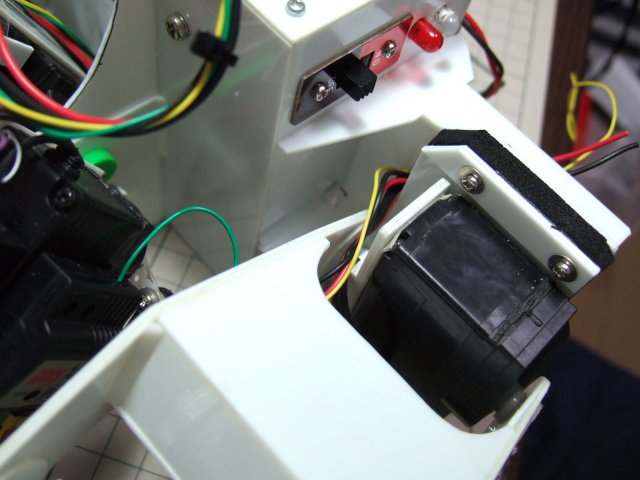
スイッチ・コネクタ基板の取り付け角度変更
通信ケーブルを挿したまま歩くときに、通信ケーブルが腰の辺りと干渉するので、基板の
取り付け角度を変えました。元の設計は、後ろ向きに転倒したときに、ケーブルがささった
状態のコネクタから地面にぶつからないようにと意図していました。
旧胸構造の状態に戻したことになり、ちょっとがっかりでした。なかなか、うまくいかないものです。
コンパイラのバージョンアップ検討
先日VC++2005とVB2005(両方ともExpress Edition)をインストールし、すこしづつ
触ってみていましたが、コンパイラ自体は自分のPCでも問題なく動いている様なので、uniの
システム構成が変わり、プログラムも比較的大きく直すので、移行の方向で調べ始めました。
先日はVBのプログラムを、自動変換をメインとして移植しましたが、今度は初めから書いてみました。
コントロールの配列が無くなっていることに気がつき、MS推奨の代替手段についてオンラインマニュアル
を読み始めたのですが、良く分かりませんでした。
いじっているうちに分かってくると思うので、気長にやっていこうと思いました。
06.07.09
配線
フルカラーLED、赤LED、ディップスイッチ等とI/Oボードの間の配線をしました。
Microsoft Platform SDKのインストール
VC++2005ではシリアル通信関係のコンパイルが通りませんでした。erslibという
フリーライブラリのお世話になっていて、VC++6の時は、「動くからまあ良いか」と、
しくみについて気にしていませんでしたが、Win32 APIが、VC++2005Express
Editionをデフォルトでインストールした状態では使えない?のが理由らしい
と分かり、下記URLからMicrosoft Platform SDKをインストールしました。
Visual C++ 2005 Express Edition と Microsoft Platform SDK を一緒に使う
http://www.microsoft.com/japan/msdn/vstudio/express/visualc/usingpsdk/
以前はwindows.hのインクルードでいきなりエラーでしたが、特定の関数の引数の与え方が
良くない・・・とか、あるライブラリがリンクできないとか・・・言う類のエラーに変わり、
意味は考えずに対症療法的にソースをいじっているうちに、とりあえずポートをオープンし、
マイコンからテキストを受け取れました。(このまま使えるのだろうか?)
とりあえずは、従来のソースが通るようにしておきますが、せっかくなので.NET Framework
の方のシリアルポートの機能?を利用するように変えていこうと思いました。
06.07.16
フレーム内配線
06.07.30
No.2サブCPUの取り付け
06.08.06
No.2サブCPUのソフト
No.1サブCPUと共通のソフトとしました。
(起動直後に出すPWMパルス幅の初期値が違うだけです)
マイコンクロック変更に関連するソフトの変更
RCサーボのPWMパルスを作るCPUがメインCPU(クロック25MHz)からサブCPU(16MHz)に
変わったので、それに関連する変更をソフトに加えました。
- 軌道計算モーション関連
足先軌道から逆運動学計算でモーションデータを作る仕組みの方は、関節パラメータ
ファイル内の、各関節の実際の角度と、その時にPWMパルスを作る関数に渡す数値の
対応部分を修正しました。(例:0番サーボが0度の時の数値が元は3107だったので
16/25をかけて1989など)
- 補間モーション関連
モーションデータファイル内の数値がPWMパルスの長さに対応する数値になっているので、
モーションデータファイル内の数値を16/25しました。
メインCPUのソフト変更
PWMパルスを作っていた関数について、自分でパルスを作らずに、サブCPUに命令を出す
様に変更しました。
テスト
メインCPUとNo.1サブCPUの間の通信テスト
のあと、PCのテンキーで、指定した座標に足先を動かすテストをしました。
06.08.13
歩行試験
No.2サブCPUとの通信テストを済ませた後、ジャイロもサブCPUに付いているので、メインCPU用
ソフトの読み取りに関する部分を書き換えて、試してみました・・・すると全身のモーションを
コントロールする部分は触っていないのにぜんぜん動きませんでした。
仕方が無いので、詳細にプログラムを調べてゆくと、2箇所、初期化していない変数を評価している
場所を見つけました。丸一日かかりました。いわゆるハマッタという状態です。
そして、それを直したら歩くようになりました。以前がらプログラムを書き足していると動かなく
なることがありましたが、もっと書き足すと動くようになったり・・・という状態でした。
今回は、わりと徹底的に見直したので、根本的に直ったと思います。
06.08.20
センサ類の接続
いつまでも動けない状態で置いておくのが気になるので、夏休みを使い、制御システムと
上半身の構造新作以前の状態に近い状態まで戻しました。
具合的には以下の作業を済ませました。
- 首RCサーボの配線
- PSD距離センサの配線
- 超音波距離センサの配線
- CMOSカメラ(Treva)の配線
- 加速度センサ(ADXL202)の配線
- 配線したセンサ類のインターフェイスソフトの修正(接続ポートを変えたので)
この中で、Trevaの接続だけ、以前描いた回路図に入出力の電線の色が逆に書いてあったので、
作業で引っかかりましたが、一応完了しました。
「同じようにハマッタ人がいたら申し訳ないなー」と思い、公開中のuniのI/Oボードの回路図を
確認したところ、電線の色は書いてなかったので、大丈夫でした。
その他、地磁気センサと明るさセンサは、使う予定が無いので積まないままにして
おきました。
ここまでの作業で、I/Oポートの増設と、肩関節の改良が完了したので、たくさんタッチセンサを
付けて、いろいろな場所の接触状態をモーションに反映させる試みに取り掛かろうと思います。
06.08.27
バンパーの取り付け
転倒した時のショック緩和のため、胸と背中に発泡スチロール製のバンパーを付けました。
材料は、ゴミ置き場から拾ってきた、テレビか何かの梱包材を加工して使いました。


06.11.05
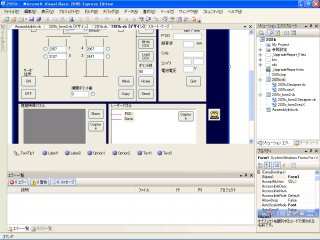
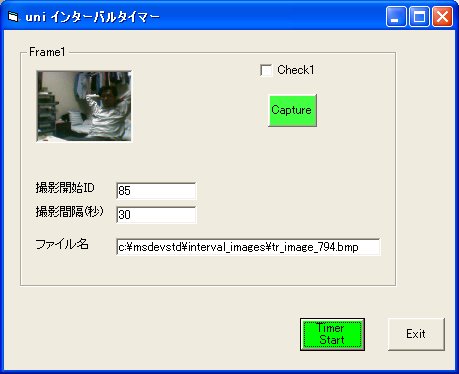
監視カメラプログラム
一定時間間隔で撮影した画像をbmp形式でハードディスクに記録してゆく、uniとPCを
シリアルケーブルで接続した状態で使うプログラムを、VB6で作ってみました。
撮影間隔を30秒にして、朝から晩まで机の端にuniを置いて撮影してみました。
自分の部屋の様子を言うのもなんですが、動物園の監視カメラみたいでおかしかったです。

スクリーンイメージ
メモ
- 表示する時の画像の大きさを大きくすると、画像ファイルサイズが大きくなるので、
カメラの1ピクセルと画像の1ピクセルを同じにして、小さな画像でファイルしました。
- 33フレーム毎に写っていない画像が混じっていました。スクリーンセイバーが動き出す時
に取りこぼしが起きているようです。
- Webサーバーに同じファイル名でftpアップロードを自動的に続ければWebカメラの出来上がり?
ケータイで画像が見られる。
- 「メールにコマンドをのせて操縦」も出来るけれど、カメラの画像だけで目の届かない場所に
あるロボットを動かすのは、状況が良く分からないので怖い。カメラの向きを変えるくらいならば
大丈夫。(特によく転ぶ2足の場合)
06.11.26
監視カメラプログラムのテスト
自分が不在の時にエアコンのメンテナンスで部屋に人が入る日があったので、試しに監視カメラ
として使ってみました。
ノートPCの省電力設定は画面をOFFにするのみとし、uniは
いつもソフトの開発中などに使っているリチウムイオン電池(7.2V 19.4Wh)で動かしました。
RCサーボのPWMパルスはOFF、動力系統のDC-DCコンバータは、制御用の端子を
使ってRCサーボに給電しないように設定しました。CPUは3個とも通常運転しました。
以上のような条件で30秒に1枚ずつ撮影したところ、約12時間撮影することが出来ました。
12時間もてば今回のような用途には使えると思いましたが、uniは簡単に外部給電に切り替えられる
様になっているので、次回はACアダプターをつないで動かそうかと思いました。
戻る
ホームへ戻る





 試験用のターゲット
試験用のターゲット
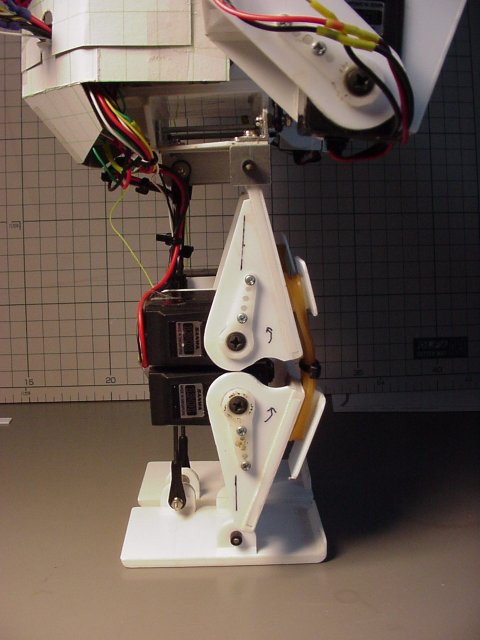 写真1:平行リンクが垂直になる姿勢で、RCサーボのギアの抵抗で倒れないようにしています。
写真1:平行リンクが垂直になる姿勢で、RCサーボのギアの抵抗で倒れないようにしています。
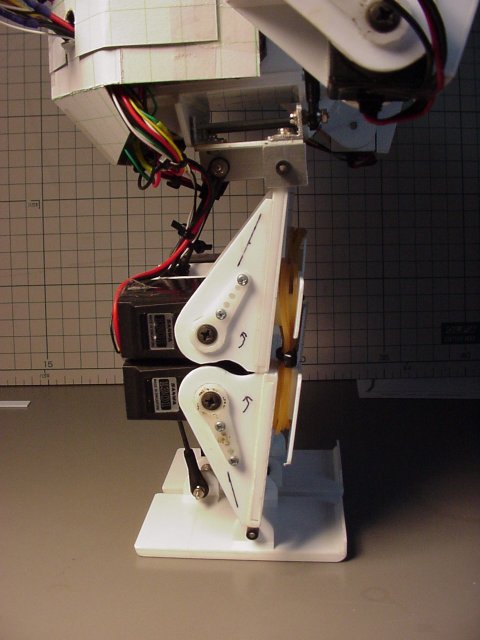 写真2:関節の稼動範囲の端で、リンク同士を干渉させて、機構的にロックします。
写真2:関節の稼動範囲の端で、リンク同士を干渉させて、機構的にロックします。






{kind=link}
{kind=link}