偼偠傔偼儘儃僢僩撪憻俠俹倀傪廐寧偺俫俉乛俁侽俇俋儅僀僐儞儃乕僪侾偮偵廤栺偟丄俠俹倀娫捠怣偵娭偡傞晹暘傪 徣偒丄慡懱揑偵倂俇娙棯壔偟偨傛偆側宍偵偟傑偟偨丅搵嵹儅僀僐儞傪夁晄懌側偔巊偄愗傞偙偲傪栚巜偟傑偟偨丅
嶌偭偰偄傞偆偪偵侾偮偺儅僀僐儞偱偼懌傝側偔側偭偰偒偨偺偱丄寢嬊嫻晹僼儗乕儉傪戝偒傔偵嶌傝捈偟丄俼俠僒乕儃懠 偲偺俬乛俷傪扴摉偡傞僒僽俠俹倀傪俀屄壛偊丄倂俇偲摨偠條側傾乕僉僥僋僠儍偵栠傝傑偟偨丅
埲崀偺愢柧偱偼侾俠俹倀峔惉傪僶乕僕儑儞侾丗倴侾丄俁俠俹倀峔惉傪僶乕僕儑儞俀丗倴俀偲偟偰嬫暿偟傑偡丅
乮倴侾帪偺峔惉乯
幨恀
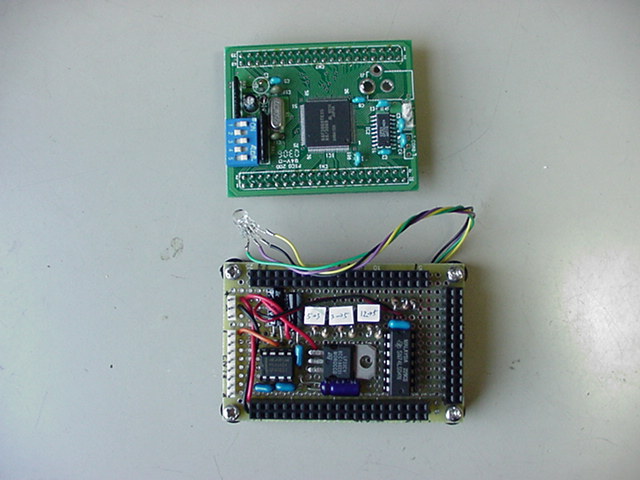  |
05.09.03丗俠俹倀儃乕僪(v1)
|
 |
儊僀儞俠俹倀梡俬乛俷儃乕僪怴媽斾妑
|
|
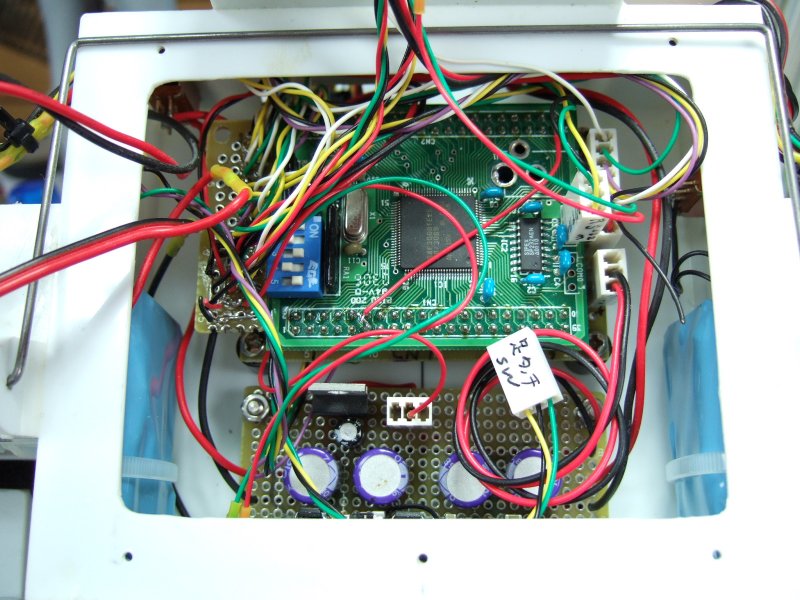
攝揹婎斅
|

|
僕儍僀儘
|
|
憖嶌斦
|
|
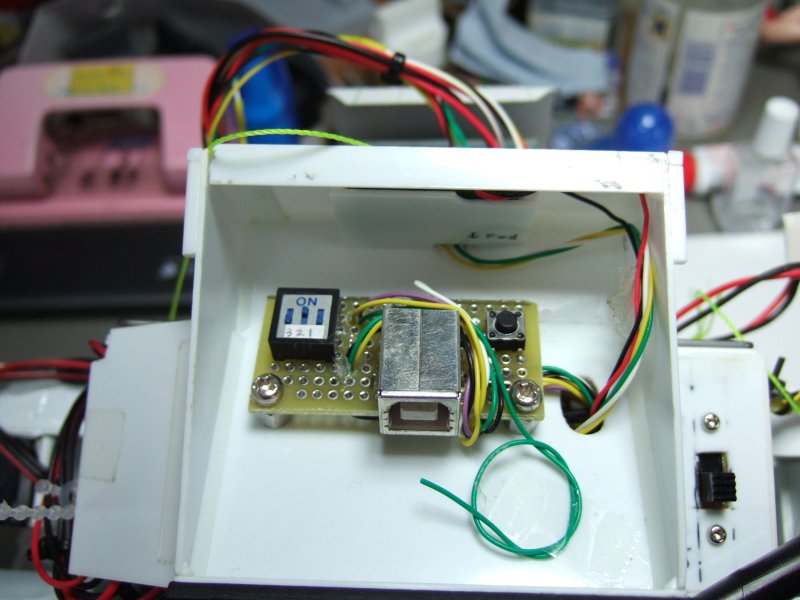
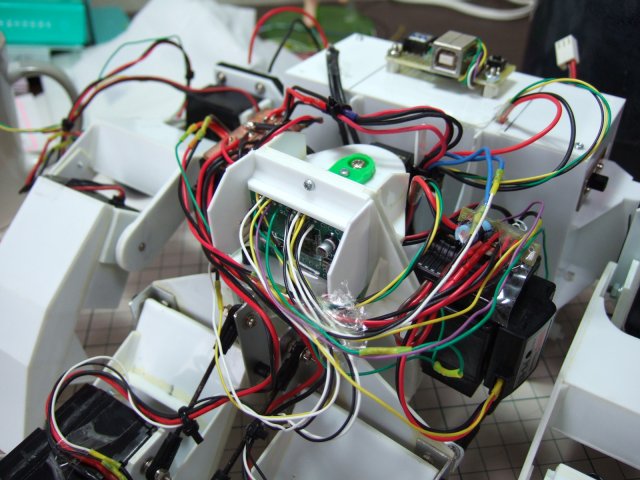
俠俹倀儃乕僪乮憰旛忬懺 v1乯
|
 |
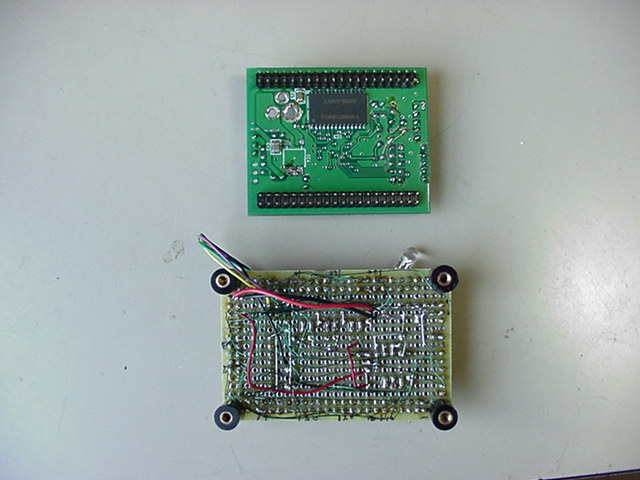
俠俹倀儃乕僪乮憰旛忬懺 v2乯
|
 |
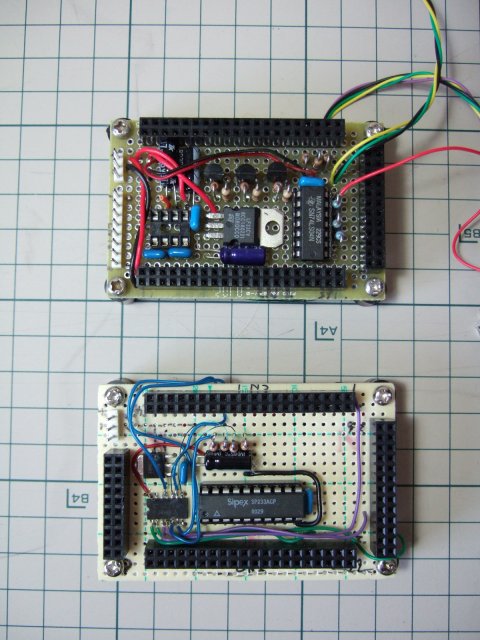
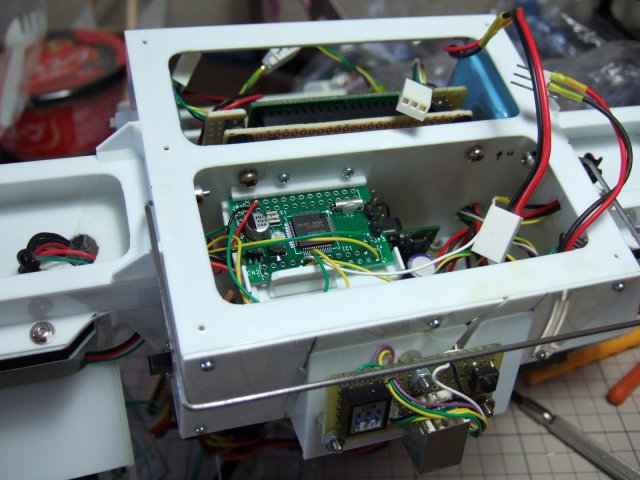
俶倧丏侾僒僽俠俹倀乮憰旛忬懺 v2乯
|
|
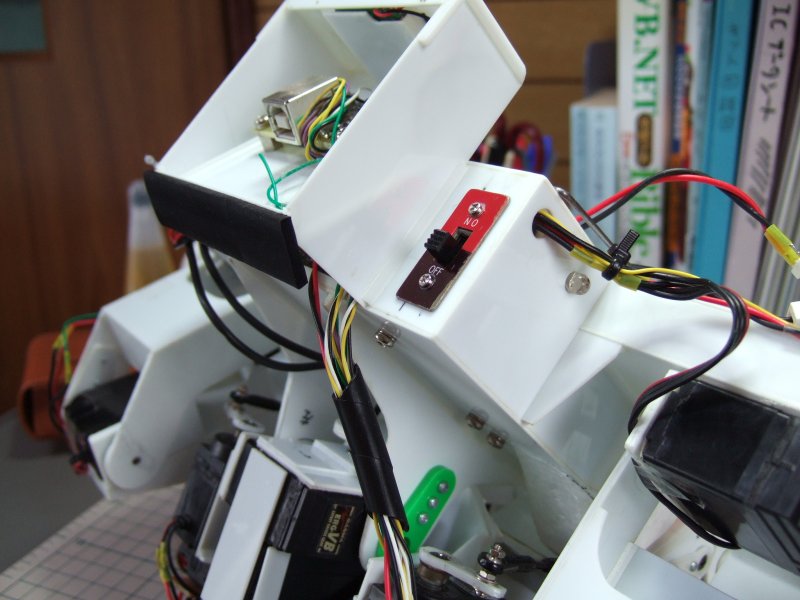
儊僀儞僗僀僢僠
|
|
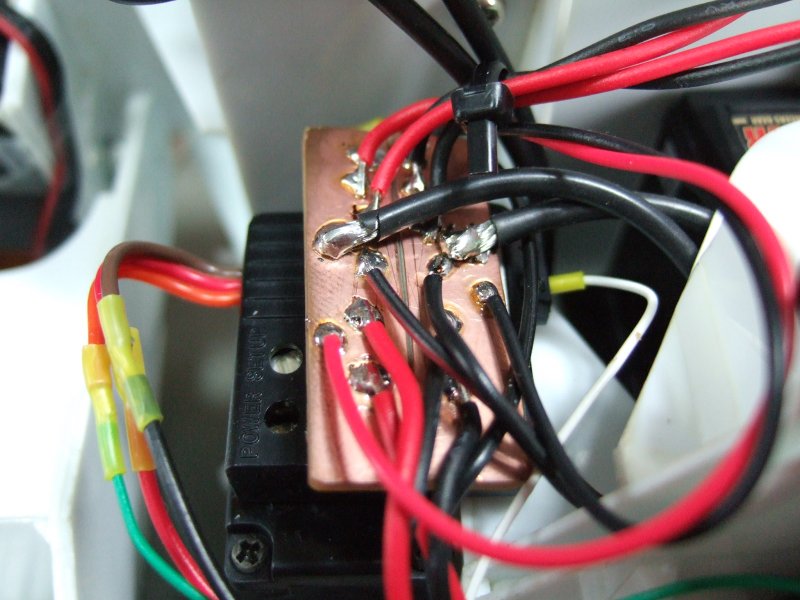
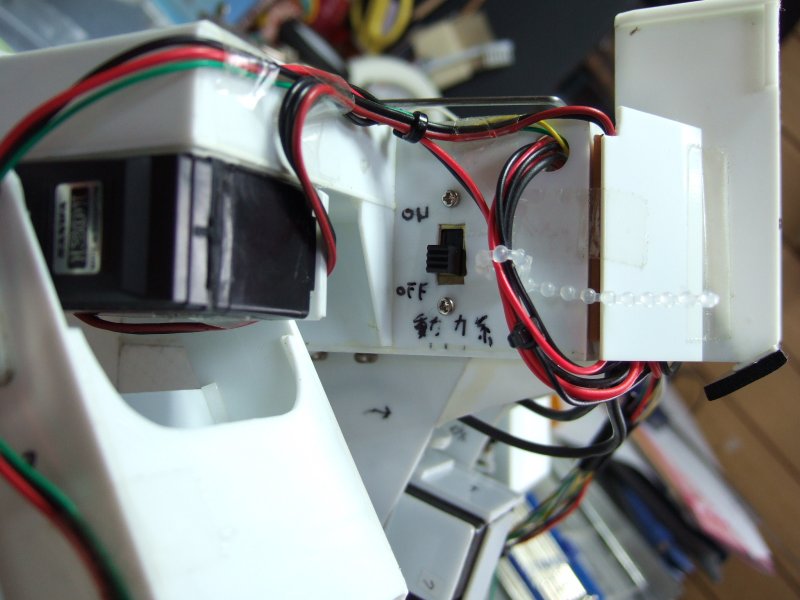
摦椡宯偺僗僀僢僠
|
|
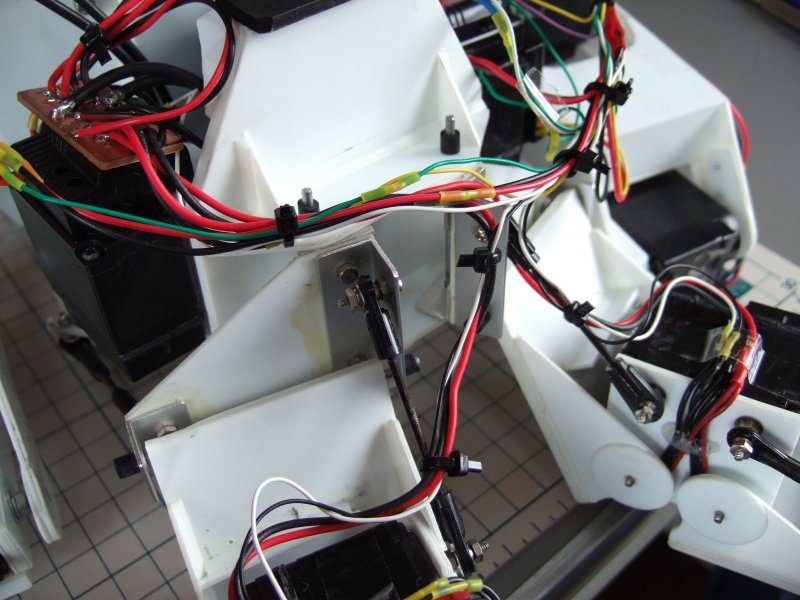
俼俠僒乕儃偺攝慄
|
{kind=link}
{kind=link}
{kind=link}