-
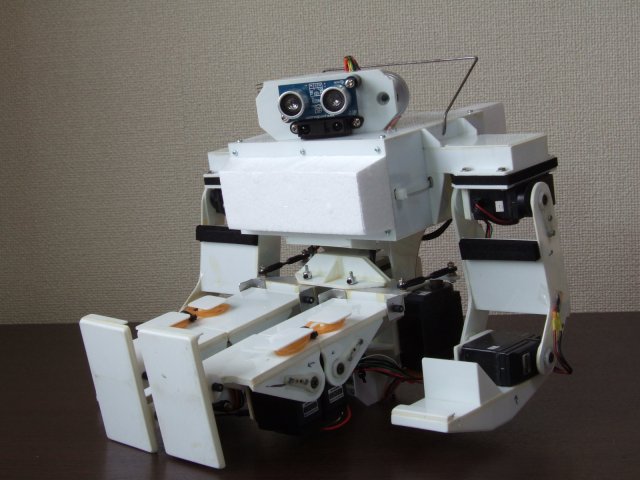
慜偐傜尒偨偲偙傠偱偡丅
媟偑暯峴儕儞僋偵側偭偰偄傞偺偱丄揹尮傪愗偭偰傕棫偨偣偰偍偗傞條偵側偭偰偄傑偡丅
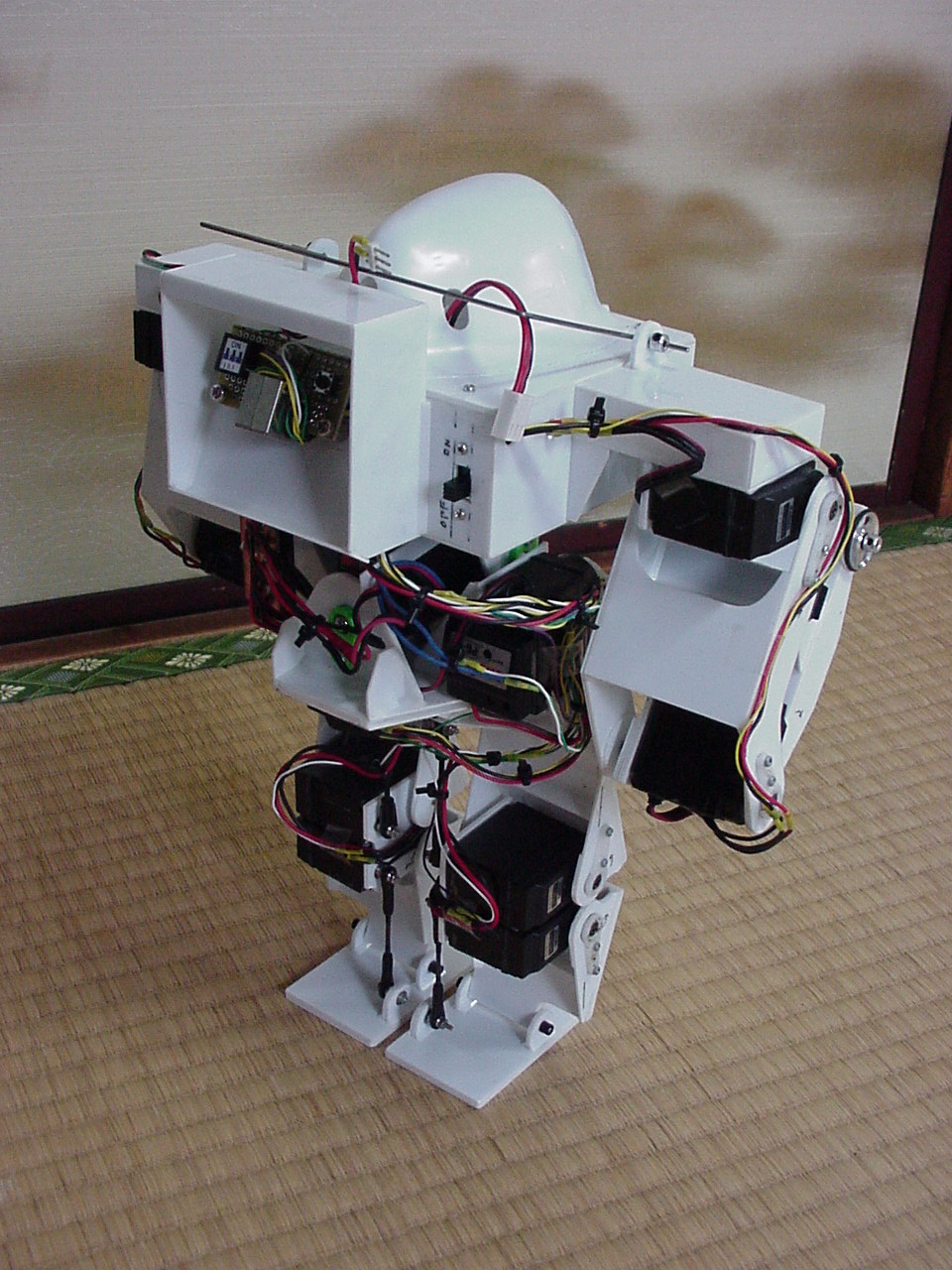
摢偺嬋柺晹暘偼丄僶僉儏乕儉僼僅乕儉偱憿傝傑偟偨丅
嫻拞墰偺弌偭挘傝偼丄懌尦岦偗偺嫍棧僙儞僒乕傪擖傟傞偨傔偺応強偱丄壓偑奐偄偰偄傑偡丅
-
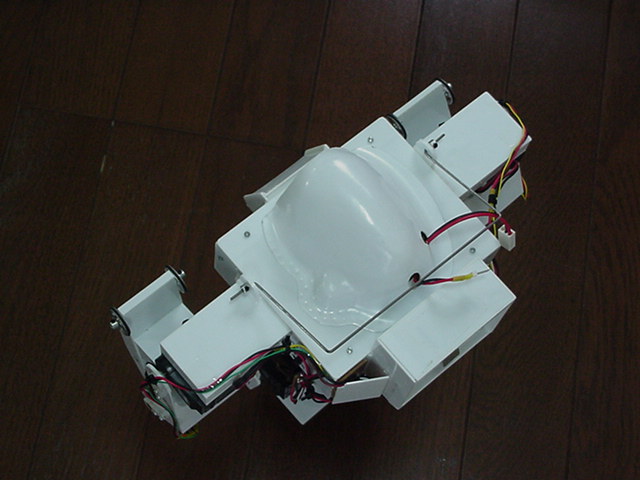
幬傔屻傠忋曽偐傜尒偨偲偙傠偱偡丅
-
屻傠偐傜尒偨偲偙傠偱偡丅乽儔儞僪僙儖乿拞墰偺倀俽俛僐僱僋僞偑僾儘僌儔儉偺
儘乕僪摍捠怣梡偺僐僱僋僞偱偡丅乮怣崋偼俼俽俀俁俀偺僔儕傾儖乯丅僨傿僢僾僗僀僢僠
偼儌乕僪愗懼梡丄僞僋僩僗僀僢僠偼摦嶌僗僞乕僩梡乮僄儞僞乕僉乕傒偨偄側傕偺偱偡乯
儔儞僪僙儖榚偺僗僀僢僠偼庡揹尮僗僀僢僠偱偡丅庡揹尮僗僀僢僠嬤偔偱丄幨恀偱偼 働乕僽儖偺塭偵摦嶌儌僯僞乕梡偺僼儖僇儔乕俴俤俢偑晅偄偰偄傑偡丅
-
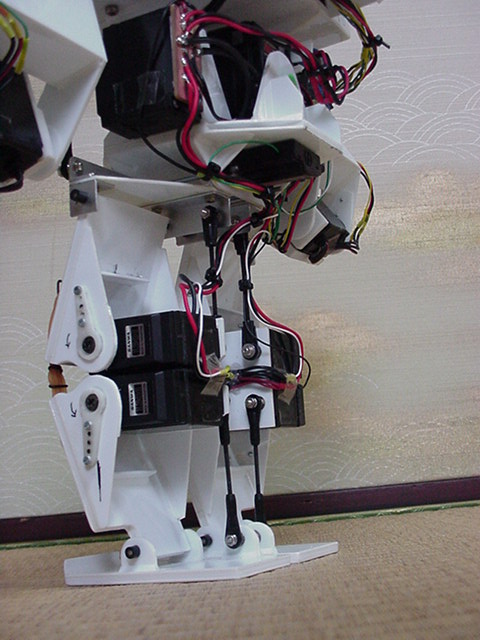
媟偼暯峴儕儞僋偵側偭偰偄傑偡丅傛偭偰偄偮傕懌偼抧柺偲暯峴偵側傝傑偡丅
屢娭愡偺屻傠偵儘乕儖幉僕儍僀儘偑揬傝晅偗偰偁傝傑偡丅
-
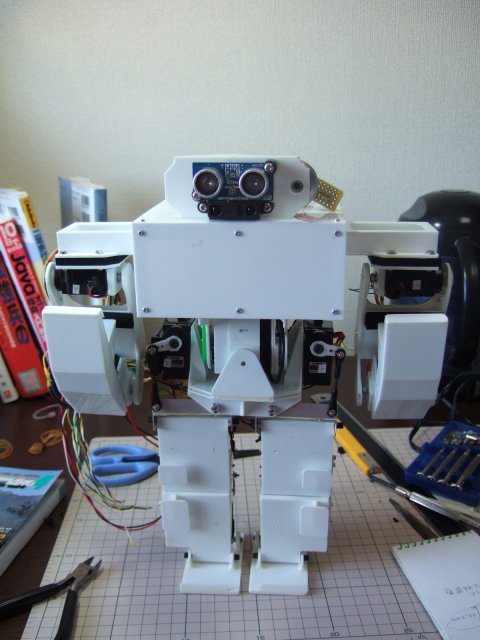
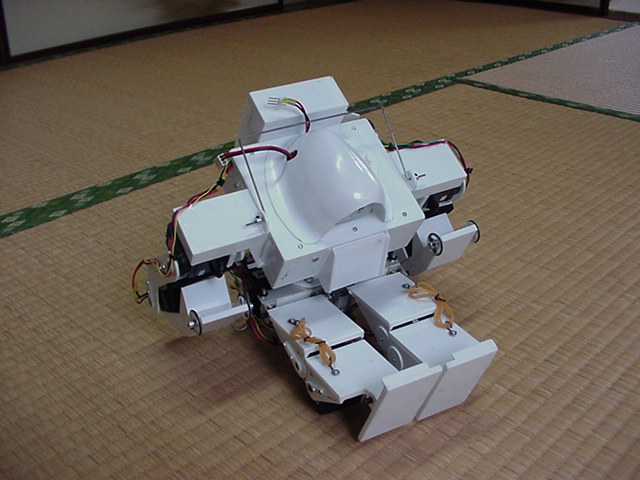
儊儞僥偺億乕僘傪慜偐傜尒偨偲偙傠偱偡丅捿傞偟偰偄側偄帪偼丄偙偺億乕僘偱
抲偄偰偁傝傑偡丅儅僀僐儞傪庢傝弌偡偲偒側偳傕偙偺億乕僘偱偡丅
-
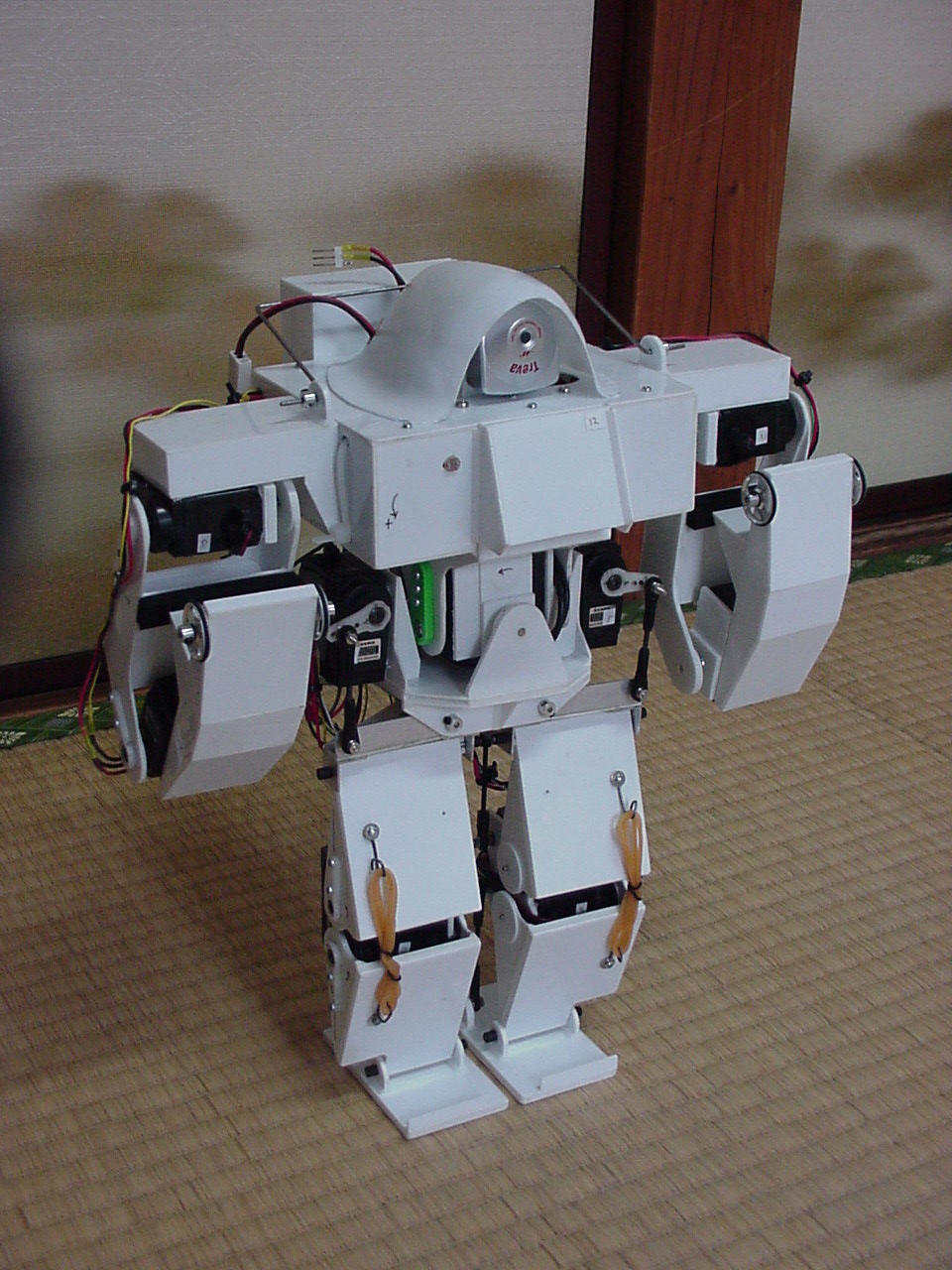
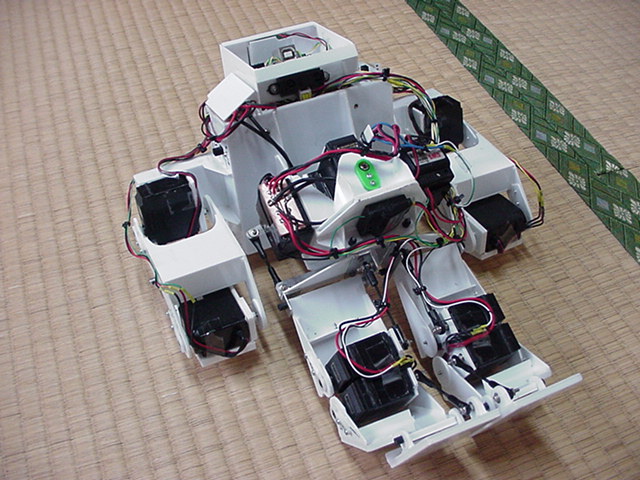
攚拞偱偡丅儔儞僪僙儖偺棤偵偼丄僶僢僋偡傞帪偵懌尦傪妋擣偡傞偨傔偺嫍棧僙儞僒乕
偑擖偭偰偄傑偡丅崢傪曕峴帪偺埨掕壔偺梫乮曕峴帪偵夞揮塣摦偑敪惗偟側偄傛偆偵
惂屼偡傞乯偵偟偰偄傞偨傔丄崢偵僕儍僀儘偑俀屄晅偄偰偄傑偡丅