
-
12個のラジコン用サーボモーターで4本の脚を駆動して歩くロボットです。
脚は6足歩行ロボット6L1から流用し、その他の部分は新しく作りました。
脚の配置はワニやカメなど胴体から大きく張り出した爬虫類的なものとなっており、
爬虫類のような歩き方をいろいろと試しました。また、胴体下面の動力を持たない
車輪を使い、比較的高速に、滑るように移動する方法(ここでは「滑走歩行」と呼んでいます)
も試しました。
| 全長 | 440 mm |
| 全幅 | 330 mm |
| 全高 | 220 mm |
| 重量 | 約1700g(RC状態) |
| 動力 | ラジコン用サーボモーター×13個 (三和 SRM-1301*12) (UNION UM9G*1) |
| 電源 | ニッケル水素電池 |
| CPU | H8/3048F PIC16F84(RC インターフェイス用) Win 95 PC(開発用) |
| 連続動作時間 | 約30分(負荷により変動) |
| 移動速度 | 20m/分(滑走歩行時) 4m/分(通常歩行時) |
| 登坂能力 | 約30度 |
| 踏破可能障害物高さ | 65mm |
|
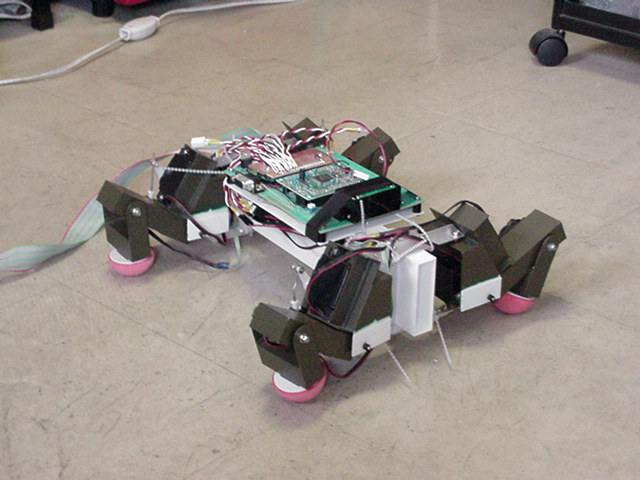
2000.05.07 ひとまず組上がった時に撮影した写真です。マイコン用の電池、RCレシーバー、スキッドが 付いていません。脚の白い部分は脚ユニットを6L1から転用するにあたり 板厚を1mmから2mmに増やして強化した部分です。 |

|
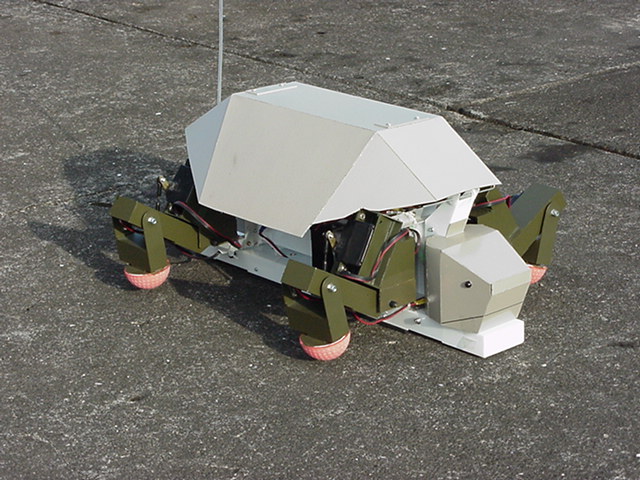
2000.06.18 車のボンネットのような要領で甲羅を開くことが出来ます。 ラジコン操縦用の装備が済んだときに2L1と並べて撮影しました。 2L1と4L1は装備や総重量的に見て同クラスのロボットのつもりで 作っています。こうして並べてみると、2L1の方が床への投影面積が 大分少ないので「家庭用ロボットは2足歩行に限る」みたいなことが 言われているのもある意味うなづけます。 |
|
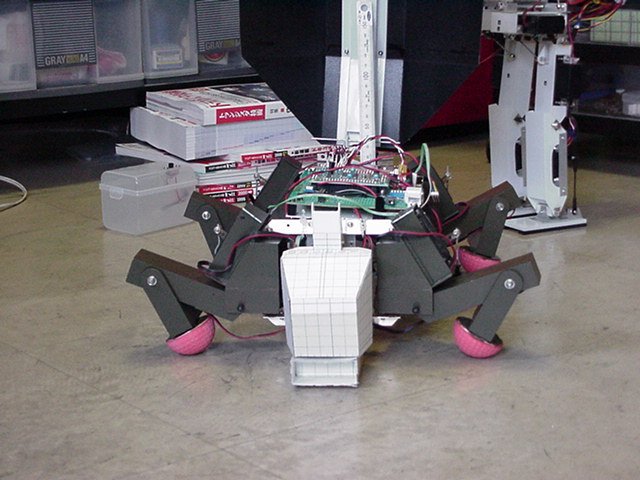
2000.06.18 正面から見た写真です。この時は工作用紙で作った箱がスキッドとして 取り付けてありました。構造的に4L1と6L1の一番違う点は 地面に胴体を預けられる点です。こうすることによって 止まっているときに地面に胴体を下ろして電池を節約したり、 坂を上ったりするときに使っている、全部の脚を同じ位相で動かす 歩行パターンをとれるようになりました。 |

|
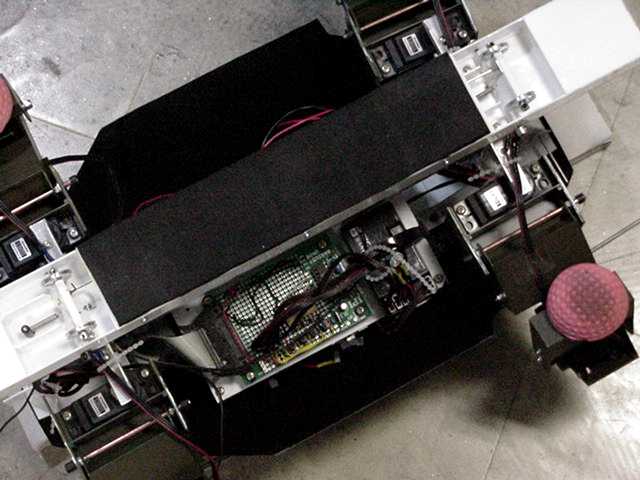
2000.06.18 上から見た、脚の間隔が分かり易い写真です。 |
|
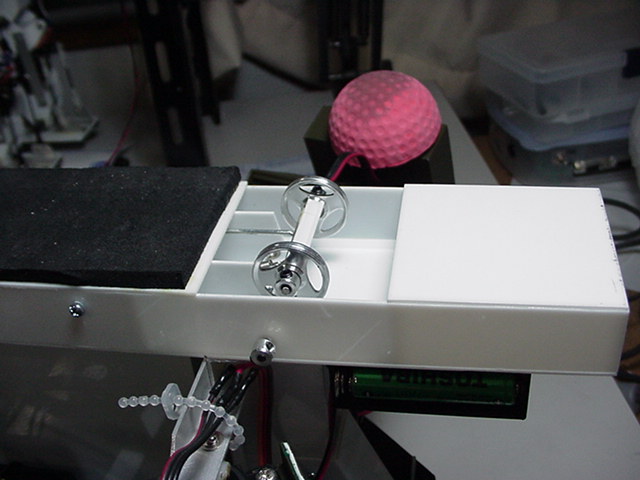
2000.07.09 スキッドの中に仕込まれている車輪のクローズアップです。ミニ4駆用の ベアリングの入ったアルミ製のガイドローラーを使いました。8割引くらいの 値段で売っていたので使ってみました。 車軸が付いている板は、写真の左に向けて常にバネで引っ張られています。 この板を押すピアノ線が左に引っ込むと自重を支える位置にロックします。 |
|
2000.07.09 ロボットの裏面です。メンテナンスの時に便利なように、甲羅は自重を十分に 支えられる強度を持たせて作りました。6L1は裏返して置けなかったので 改良しました。 足の裏はスポンジゴムのゴルフボールを半分に切って接着してあります。 |
|
姿勢の高い歩行 ロードクリアランスを高く取った姿勢での歩行です。姿勢を低くした時と比べ、関節のトルクに 余裕が少ないので歩行速度が低くなっています。この歩き方が一番カメに似ている気がします。 |
|
|
姿勢の低い歩行 ロードクリアランスを低く取った姿勢での歩行です。姿勢を高くして歩くときは、歩行サイクルの 一時期、遊脚の足先が地面をこすりますが、この場合は足先の代わりに底面の車輪が接地するように なっています。というわけで超信地旋回をするときは、車輪を引きずる音がしています。 |
|
|
角材を乗り越える 坂を上るときと同じ足の運び方で、段差を乗り越えます。ロードクリアランスが越えられる段差 の高さとなります。 難しい制御無しに、確実にロードクリアランスと同じ高さの障害物まで踏破できるのが良いところです。 |
|
|
滑走歩行 胴体下面にある、引き込み式の小さな車輪を利用して歩く、というか滑るというか・・・ こういうのをなんと言うんでしょう?これで分速約20mです。 |
|
|
カーブする 旋回半径350mmで歩いています。旋回時の足の動かし方が見やすい動画です。
自動車がカーブするときの轍に沿って、旋回の中側/外側の足先を動かすイメージです。
|
|
|
坂を上る 約25度の傾斜の坂を上っています。こうして4本の足を一度に使用して体を前へ 進めると、平地を歩く場合と比べて半分の速度になってしまいますが、前に進む力 は倍になります。およそ10度を超えると平地の歩行パターンでは登れなくなります。 |
|
メカ |
エレキ |
ソフト |
| 機構や構造等主にプラ板やアルミで出来ている部分や 形に関する情報です。 | マイコンやセンサーのハード等、主に電子回路に関する 情報です。 | ロボットを動かすためのソフトウェアに関する情報です。 |
|
関連技術 |
その他 |
|
| 本サイトの他のロボットと共通する技術に関する情報です。 |
|