4足歩行ロボット(4L1)の製作日誌
製作の区切りごとに、新しい物から古い物の順に書いてあります。
02.02.23
0番関節の改良
01.12.01
電池の変更
前回動かしてから1年以上たちますが、久しぶりにラジコンで動かせるように復活しました。
プロポと受信機をAM27MHzの1985年型からFM40MHzの現行機種に変更しました。
ついでに、RCデコーダーの受信機側の電源を、マイコンの5Vと共用化しました。
また、マイコン用の電池を8.4V120mAhのNi-MH電池から、2L1v5用のLi-Ion電池
(SONY NP-F550)に変更しました。
以上の変更で、甲羅無しの全備重量が1580gになりました。ソフトは触っていないので、
動きは特に変わりません。去年、一部の歩行パターンの動画撮影をし忘れたまま
分解状態になっていたので、この機会に残りを撮影し、公開しようと思います。
01.02.04
RCデコーダーのソフトのバージョンアップ
- バージョンアップの内容
送信機と受信機のセットはサンワの「STAC 4WD」という1983年頃の4チャンネルプロポを
2チャンネルだけ使い、片側のスティックに0~8の数字を対応させていました。これに
もう1チャンネル追加で読むようにし反対側のスティックにも数を対応させ0~10を
対応させました。
- PICコンパイラの印象
先週2L1の加速度センサーユニット用にPICのプログラムを書いたので、
続けて書けば効率が良いと思いRCデコーダーのソフトをバージョンアップしました。
6L1用に作ったときはアセンブラを使いましたが、今回は秋月で2000円で売られている
Grich RC Inc製のCコンパイラを使いました。
このコンパイラを使ってみて、予測できない
動きをするので苦労させられました。
なにがどうなっているのか、詳しく調べることはせずに同じ意味で違うコーディングの
プログラムを10パターン程度作り、動いたところで終わりにしました。
00.07.25
下のグラフは足先軌道として長円を使った時にサーボモーターに出力するデータをプロット
した物です。4L1のプログラムはかなりの部分6L1から流用されています。制御波形
生成サブルーチンも流用したソフトウェア部品の一つです。
6L1で使っている時から計算に怪しい部分があることに
気が付いていましたが「とりあえず動いているからまあいいか」と放ってあった部分を
4L1では修正しました。
実際に修正したポイントは、逆運動学計算の途中で右足と左足で符号を逆にする部分
の一部に誤りがあった点を正したのと、長円軌道の遊脚部分(脚が地面に付いていない時)
の軌道分割の方法を変えて波形が滑らかになるようにしました。(6L1の0番関節
データにあった波形の「折れ目」が無くなりました。)
足先軌道(長円)
00.07.20
ロボコンも、心配していた輸送中や競技中の破損も無く無事終わりました。今までに
試したことのある技術要素と、既に製作済みのユニットを大急ぎで組み合わせて
製作したので、記録の整理が先送りになっていました。そんな訳なのでこれから
色々と試して記録を取ろうと思います。
6L1の時にはロボットの取り扱いが煩雑であったため、あまり行わなかった
野外での歩行テストとその記録収集を行おうと思っています。それというのも、
6L1はラジコンで歩かせるときに完全にマイコンを降ろしてROMを外さないと
プログラムの変更が出来ず面倒だったので、あまり野外を歩かせないうちに
お蔵入りとなっていたからです。今度は書き換えが楽なので色々と遊んで
みようと思います。(H8内蔵ROMの書き換え回数制限が玉に瑕です)
00.07.09
合計6種類の歩行パターンをROMにセットし、ラジコンとして完成しました。
連続稼働時間の試験と操縦の練習をかねて電池が無くなるまで一気に歩かせる試験をしました。
(実際は30分で飽きたので止めてしまいました。操縦して面白いロボットと言うのも今後の
課題だと考えています。)
床に空き缶を並べてスラロームの練習をしました。空き缶の間を縫って歩くカメロボットの操縦は
何かちょっと不思議というか・・・シュールというか・・・変な感じでした。
6種類の歩行パターンの内訳
- 平地用(滑走歩行/通常歩行)
- 登坂用(ロードクリアランス大/小・・・隣接脚間位相差は共に0度)
- 障害物乗り越え用(隣接脚間位相差0度/180度)
00.07.02
補助車輪のメカが完成し、車輪の出し入れをするソフトと車輪を積極的に利用する
歩行パターンのソフトが出来ました。これで一応計画していた機能がそろったので
歩行パターンの調整をし、操縦の練習を1時間程したら7/15日が予選です。
スタッフの人から他の競技参加ロボットの事を聞いた所では、4L1は予想平均タイムに
届かない様ですが、まあいいでしょう。イベントを楽しんできたいと思います。
00.06.18
コンパイラのバグに当たったときには、ロボコン(フジレテビの第2回ロボット闘技場)を
棄権しようかと思ってしまいましたが、回避手段が見つかり、コースを踏破するための
最低限の機能がそろいました。そこで、飾りの部分と最高速度を伸ばすための補助車輪の
メカの製作にかかりました。
00.06.04
RC化の基本部分が完了しました。
登坂力は最低30度に設定して製作を進めていましたが、ロボコンのレギュレーションが変わって坂が
20度に変わりました。実際にテストした結果でも25度位までならば特に工夫せずにも
登れました。30度を超えた場合、一度滑り始めたら坂(ベニア板製)の下まで滑ってしまったので
登り方に工夫がいる事が分かりました。
6足歩行ロボットを作っていたとき、Pタイルの床のような場所も不整地と変わらない歩き方で、
同じ電力を消費して歩くことをもったいないと感じていました。
(1回の充電で6L1が進める距離と、同じ電池で走る、同じ重量のラジコンカーが進める
距離を比較すると分かると思います)
こうした効率の悪さを軽減するため、フラットな場所では補助的な車輪を使うことを考えてみました。
そこで今回、胴体の下に小さな車輪を付け、自重を足と車輪に分配して歩く歩き方を試しました。
こうすると、自重を支えるための力を進む方にまわせるので速く歩けました。
(いままで試したところでは10m/分くらいの速度)
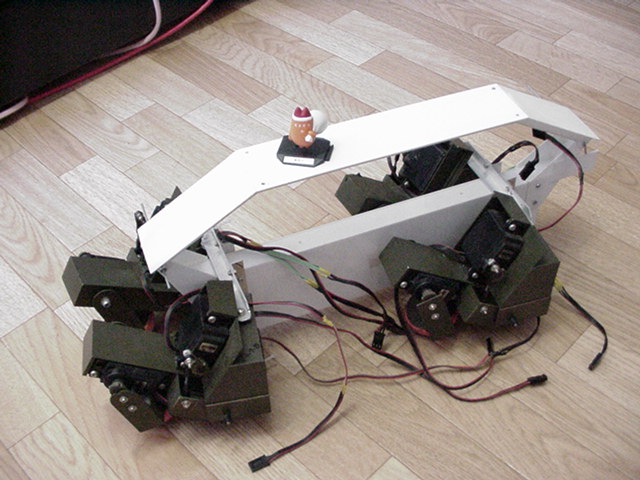
00.05.07
正月以来放置してあったロボットを、あるロボコンに参加するため、幾つか計画していた
改造プランに沿って急きょ組み立てました。7月15日が期限なのでなるべく部品を新造しない
つもりでしたが、全長、全幅が規格に合わないので胴体(フレーム)を新しく作りました。
コースには、5cmの段差と30度の坂があると言うことなので、それらをクリアできるように
設計しました。このロボットの脚ユニットの流用元である
6L1は2.5cmの段差と7度の坂までしかクリアできなかったのでちょっと考えて
しまいましたが大丈夫そうなので作り始めました。メインページの予定総重量は、この要求される
登坂能力から逆算したRC状態の総重量なので、これを越えるとまずいことになります。
基本的なプランがあったとはいえ1日で詳細設計をして3日で歩けるところまで組み立てる
のは少々ハードでした。
戻る