(1993~1996年製作)
(1993~1996年製作)
2.後部船体は、同一構造のセグメントを組み合わせて作り、セグメント数の 増減で魚の波状運動の近似度合いと、推進効率の関係を調べる。
3.振動翼推進に関する難しい原理はさておき、ロボットと同じくらいの 大きさの魚の動きを真似する。
4.船体の製作にはなるべく手間をかけない。
5.最高速度を追求しない。
等です。(思い出したらまた書き足します。)
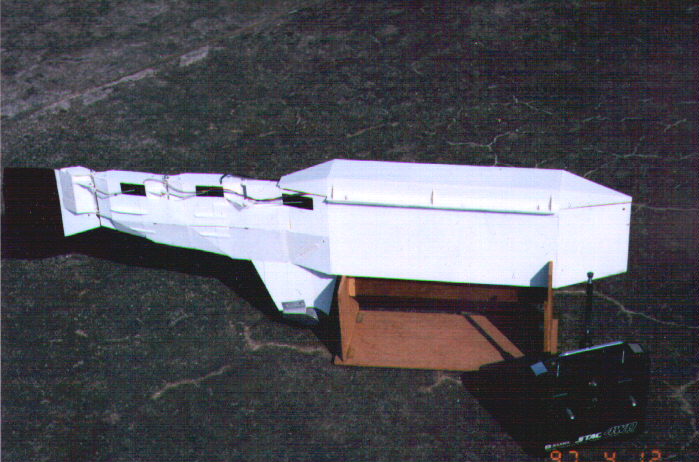
| 全長 | 1000 mm |
| 全幅 | 90 mm |
| 全高 | 270 mm |
| 重量 | 3200 g(無線操縦時) |
| 動力 | ラジコン用サーボモーター×3個 (サンワSM-391) |
| 電源 | ニッケル・カドミウム電池 |
| CPU | Z80互換CPU(ポケコン) PC286-LS(開発用) |

|
泳いでいるところです。加速開始時点ですので引き波はほとんど出ていません。 尾ひれが作る渦が良く写っています。この写真では、プラスチックの骨が入った 0.3mm厚のゴム(クロロプレン)製の尾を付けています。後部船体の関節には カバーが付けてあります。 |
|
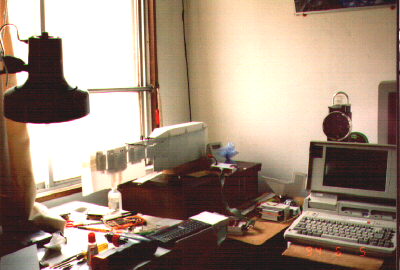
テストの風景です。PC-286から直接動かしているところです。
この写真に写っている尾ひれと同じ形で、柔らかさが違うもの
を使用したテストをしました。その結果、材質の弾性を利用すること
の有効性が分かったので、以降は柔らかい尾を付けています。 |
|
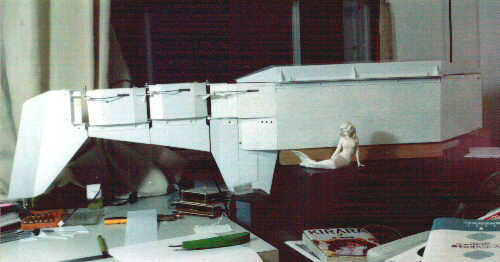
初期段階で製作した尾ひれの一つを装備した写真です。この頃 (94年の春)は、関節カバーを付けていませんでした。 |
|
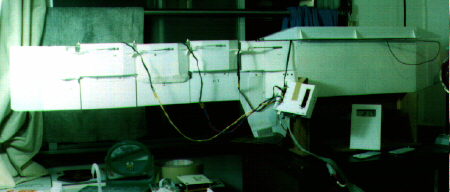
4セグメントで実験していた頃の写真です。3セグメントよりは 4セグメントの方が、魚の波状運動の近似が良いだろうと思い 4セグメントで動かしていましたが、関節による抵抗増加のほうが 大きく効いてきたようで、3セグメントの方がむしろスピードが出ました。 そのため、以降は3セグメントで実験を行いました。精密な計測を 行ってみたいところでした。 |