概要
このロボットは、前部船体と後部船体2つの部分から構成されています。
前部船体はベニア板から出来ていてコンピュータ、制御回路、電池が
入っています。後部船体は、尾鰭とサーボモーターが入ったセグメント
から出来ています。材料はプラ板です。
持ち運びの便のため、前部船体と後部船体はナットを一つ外すだけで
分離可能になっています。バランスをとるために約1kg程の
バラストを積み込んでいます。
普通の船の場合、重心位置はセンターライン上にあり動きませんが、
このロボットの場合、センターラインが時々刻々変形し、
その上、状態によってはセンターラインの上に重心がこない瞬間も有ります。
そのため各部分がそれぞれを均等に浮力で支える様に、
フロートとバラストを調節する必要が有ります。
この調節が悪いと最悪の場合転覆するので、気をつける必要があります。
(完全防水でない場合には特に)
沈没すると、金銭的にも製作の労力的にも痛手が大きいので、設計の途中で
復原性の計算等も行い、重心位置や総重量の目安も求めました。
|
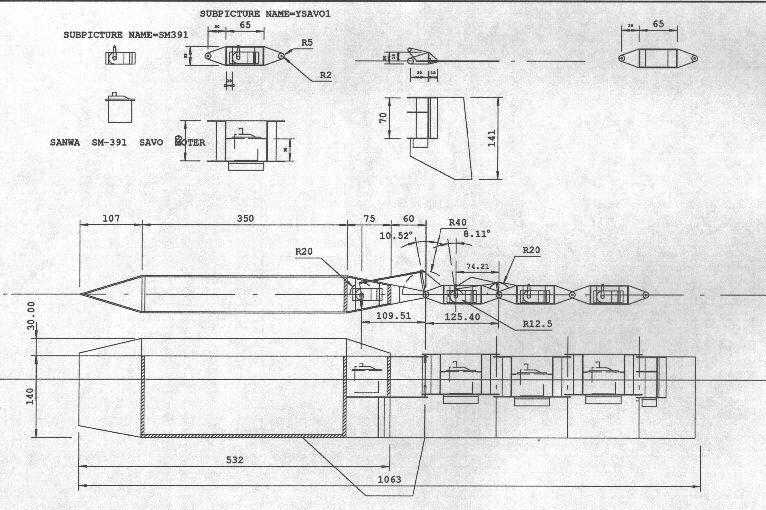
2次元で描いた図面です。人に作ってもらうための図面ではないので
あまり細かいことは描いてありません。
|
[前部船体]
[後部船体]
構造材料
前部船体
2mm厚のベニア板を使用しました。選択の理由は「ラジコンボートと
いえばベニア板」というイメージがあるので何とはなく使ってしまいました。
利点としてはプラ板と同様、入手が簡単なこと、
価格が安いこと、加工が簡単なこと等があげられます。
後部船体
田宮模型のプラ板を使用しました。
利点としては、入手が簡単なこと、
価格が安いこと、加工が簡単なこと等があげられます。
プラモデルを
作る道具で用が足りることがプラ板を選んだ最大の理由です。
接着剤
ベニア板の接着には、合成ゴム系の接着剤を使用しました。
プラ板同士の接着には、ラッカーうすめ液を使用しています。
匂いで判断するかぎりでは、プラモデル用の液体接着剤と
近い成分のようです。接着面に隙間が出来ないように注意して
接着すると、元から繋ぎ目が無かったかのような強度で接着されます。
接着面積にもよりますが、完全に接着するには数日かかります。
商品名:アトムハウスペイント、ラッカーうすめ液
前部船体
後部船体
魚ロボットのトップページへ戻る
ホームへ戻る