概要
パラレルIOボート
PC286から動かすときに使う物と、E-200から動かすときに使う物の2種類があります。
どちらにも8255が1個入っています。入力専用に8bit、入出力兼用で24bit有ります。
「パソコンでモーターをコントロールする」といった趣旨の本の初めのほうに、
回路図が載っていることが多いです。メーカーから市販されている物もあります。
自作しても面白くないので、お金に余裕があれば買ってしまった方が良いでしょう。
(99年現在、8255のような機能は制御用のCPUに内蔵されてしまっているので、
作る必要が無いとも言えます。)

|
パラレルIOボードとポケコンを接続したところです。
この形でロボットに搭載します。
|
|
パラレルIOボードとポケコンの接続を外したところです。
ポケコンとボードはハーフピッチ/40Pのカードエッジコネクタで接続されています。
使用しているICは8255, 74HC138, 74HC32, 74HC245がそれぞれ1つずつです。
基板はサンハヤトのMCC-194Sです。
|
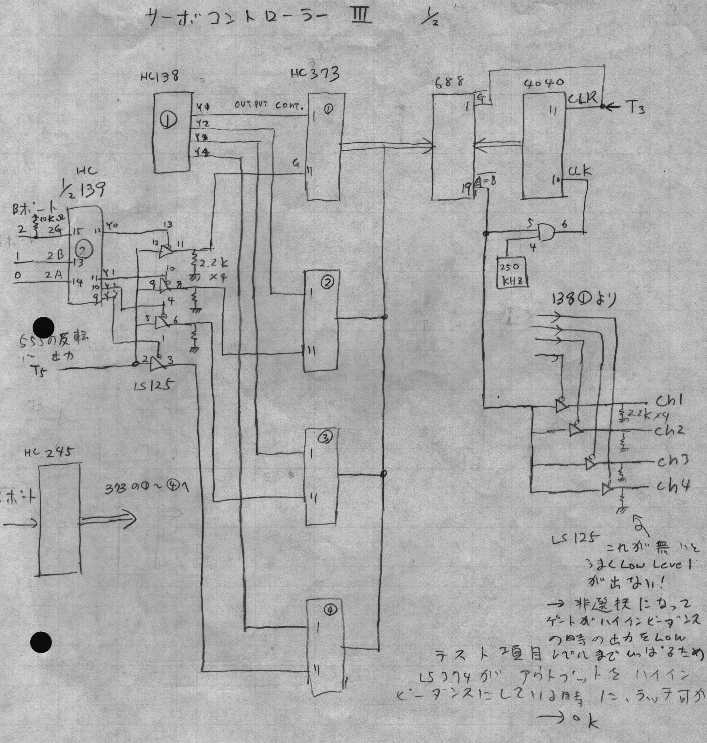
信号発生ボード
TTL ICで構成したボードです。マイコンに内蔵されているカウンタ・タイマ
回路と大体同じ物です。MSXとPC-100を使っている頃にこの回路の雛型を作りました。
今ならばH8等のワンチップマイコンを使ってしまった方がずっと簡単に作れますが、当時は
そう言う物が無かったのと、CPU等に関して理解が浅かったのでハードオンリーで構成しました。
このボードはサーボ4個分の信号を作ることができます。制御ソフトからのアクセス手順は
後の歩行ロボットと大体同じです。
RC受信機の出力を読み取る回路もこのボードに載っています。
時代遅れと感じている回路図を、新しく描きなおす気が起きませんが、
文章ではどのような物か分かりませんので、当時の製作メモとして残してあった
フリーハンドの回路図もどきを置いておきます。
回路図 1/2 (58 K byte jpeg file)
回路図 2/2 (60 K byte jpeg file)
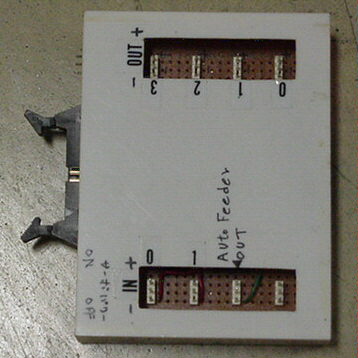
信号分配ボード
信号発生ボードから送られてくる信号のバッファリングと
ラジコンの受信機からの信号切り替えをします。
このボードにサーボモーターと受信機を接続します。
パソコンでソフトを作りながらテストするとき、信号発生ボード
からの信号を中継するために作りました。
74LS245,74LS153とコネクターが付いています。
外でテストするときには、信号発生ボードとサーボの距離が近いので
無くてもかまわないのですが、ロボット内部のスペースに余裕があるので
載せてしまいました。
ここにラジコンの受信機をつないでもまともに動きません。
信号レベルの変換(3V->5V)を忘れているからです。
ホームページに書くために、製作の記録をあたってみると、ある時点では
レベル変換の必要性に気がついている記述があるのですが、途中で忘れてるようでした。
製作期間が長くなるとこういったこともある様です。
たとえ一人で作る場合でも、製作期間が長くなるときには、途中の記憶喪失に備えるため、
たどり易いドキュメントを残すと良いようですね。
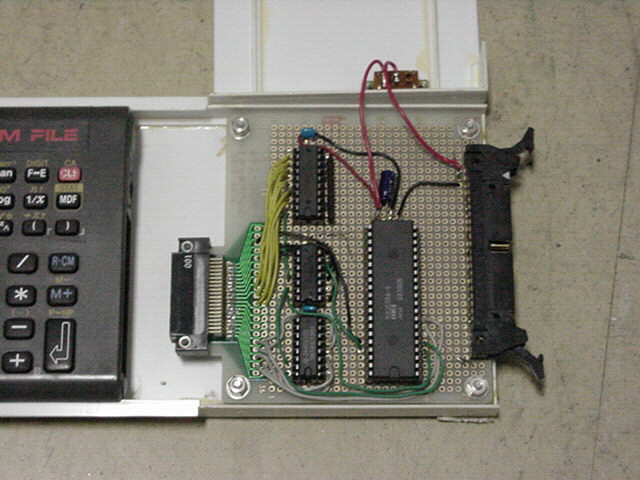
基板の写真1
基板の写真2:ケースから基板を取り出した状態
E200
シャープのポケットコンピュータです。4MHzのZ80互換CPUと32Kbyte
のRAMを搭載し、単3乾電池4本で数十時間使用できます。Z80のバスの信号が
、カードエッジコネクタで出ているのでワンボードマイコンとしても使えます。
1999年7月の時点では、まだ販売されていました。RS232接続でインテルヘキサ形式
のファイルを読み込める等ワンボードマイコンと同じ様に使えます。
またキーボードとディスプレイが付いているので、状況によってはこれで
プログラムを開発した後で、ワンボードマイコン用のROMを作った方が
便利な事もあります。実行速度を重視しない時にはベーシックでプログラムを
作る事が出来ます。
戻る
ホームへ戻る
{kind=link}
{kind=link}
{kind=link}
{kind=link}