
(1996~1998年製作)
English
方向によって最高速度に差はありますが、どちらへでも進むことが出来ます。 不整地歩行の能力としては、約25mmの起伏がある場所までは歩けます。 多脚歩行ロボットの特徴として、走破性能のみがクローズアップされている ような気がしますが、個人的な意見としては全方向に移動するメカニズム としてもう少し評価しても良いと思います。多脚歩行メカニズムは制御ソ フト無しには柔軟な動きをしませんが、メカニズムそのものは一般的な 全方向移動車に比べてむしろ単純に見えます。
| 全長 | 550 mm |
| 全幅 | 350 mm |
| 全高 | 350 mm |
| 重量 | 2600 g(無線操縦時) |
| 動力 | ラジコン用サーボモーター×18個 |
| 電源 | ニッケル水素電池 |
| CPU | Z84C1106(サーボ制御信号発生用) PIC16C84-04(無線用) Win 95 PC(開発用) |
| 連続動作時間 | 約30分(無線操縦時) |
| 移動速度 | 約 6m/分(無線操縦時) |
この動画は、当時デジタルカメラが普及する前だったので、画像は8mmビデオで撮影し、開発の時系列で 編集したものをビデオキャプチャして作りました。流れは以下の様になっています。
2.脚2本の移動テスト
脚が2本できたところで、胴体を引きずるようにして移動しています。
3.直進歩行テスト
直進歩行のテストです。後にフル装備で重量が大きくなった状態と比べると大きな歩幅で歩いています。
4.各種歩行テスト
斜め前方、超信地旋回(胴体の中心を旋回中心に設定)、真横、緩い旋回
(旋回半径を30cm程度に設定)で歩いています。方向によって脚が出せる力が異なり、
前後進で一番速度が出せます。
ココまではDosVパソコンから直に、有線制御していました。
5.リモコン操縦
多脚戦車風の飾りつけを終え、ポケコンから有線操縦出きる様にして、屋外で撮影しました。
直進から旋回、またその逆に、スムーズに動作がつながるように工夫しました。
開発の記録(その2)
2.4足歩行(1)
胴体中央の脚を一対外し、4足歩行を試してみました。一度に2本の足が地面を離れる動的な
歩行パターンです。
3.4足歩行(2)
足を1本ずつ地面から上げて前に送る歩行パターンの一つです。自重を支えるその他、3本の足
が構成する3角形から重心が外れ加減なので揺れが大きくなっています。
4.ラジコン操縦
マイコンや電池などを全て内蔵し、ラジコン操縦出来る様にして外で撮影しました。重くなったので
歩幅が小さくなり、歩行速度が下がっています。
5.ライントレース実験
充電ステーション等との自動ドッキングを想定して、胴体先端にセンサを付け、ボール紙で作った箱に
位置を合わせながら乗っかります。胴体と線の方向が、だいたい平行になるように向きを変え、
箱にひいた線が白黒白から黒白黒に変わった位置まで進んだら動作完了です。
センサ追加と共に、この実験のために足の設置位置を変えずに体の向きを変える機能や、センサの位置を
中心に旋回する機能などを開発しました。

|
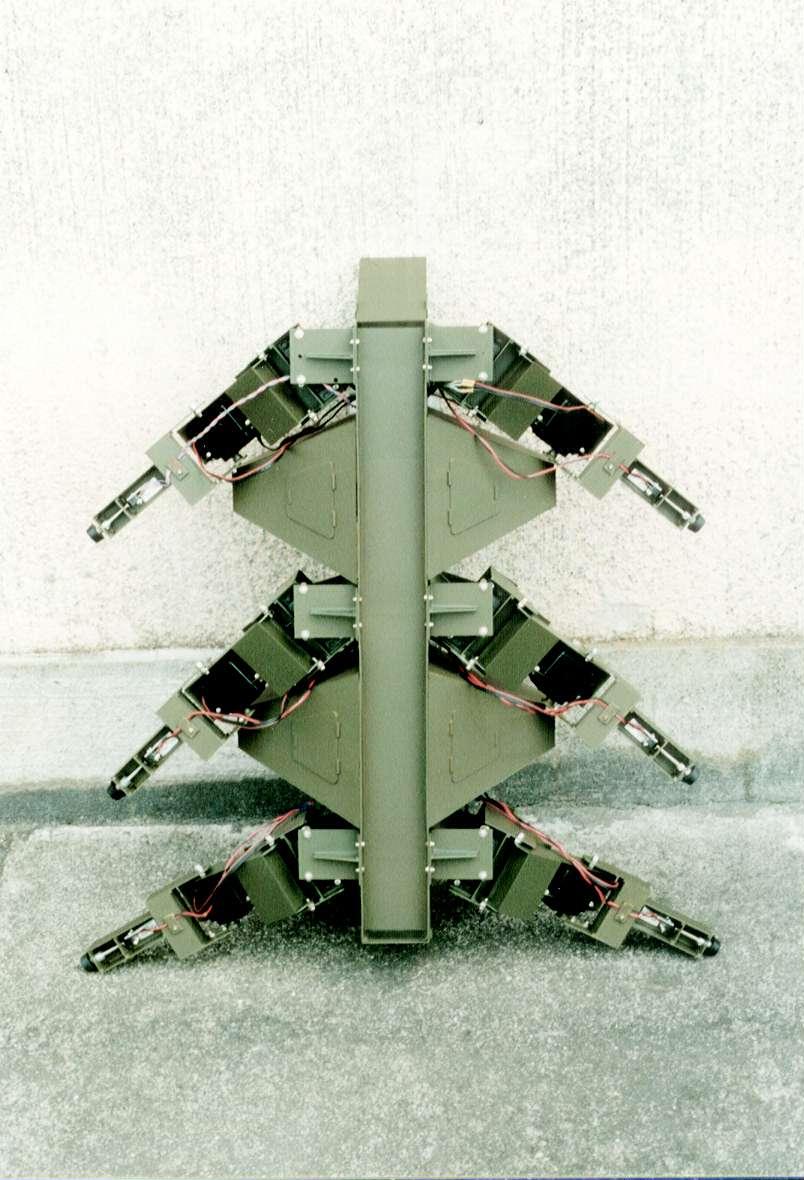
ロボットを正面から見た写真です。脚を広げています。 外見のデザインは、アニメ映画の「パトレイバー2」冒頭に登場する 指揮車をイメージして作りました。 (アクチュエーターの形式、パワー、総重量、脚の可動範囲などの都合でプロポーションはかなり違いますが・・・) |
|
ロボットを裏側から見た写真です。足先に取り付けたタッチセンサーが写っています。 通電されていないときは、この様にぐったりとしています。 |
|
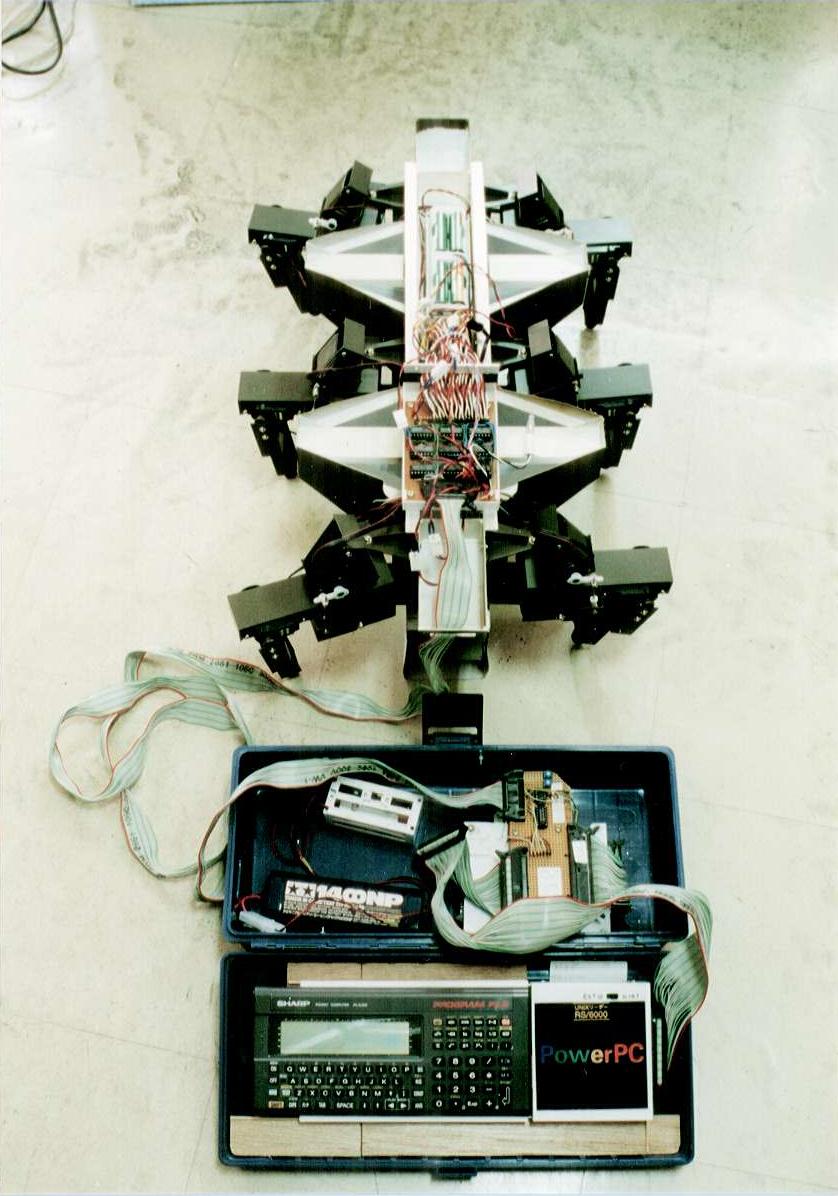
有線・遠隔操縦の構成です。工具箱にセットしてある、ポケットコンピューターのテンキーで操縦します。 |
|
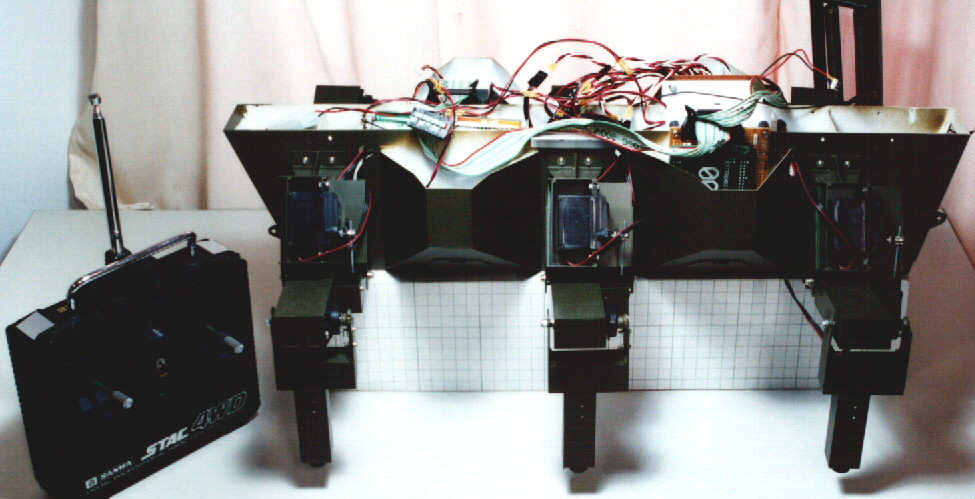
無線・遠隔操縦の構成です。4chの送・受信機で操縦しますが、使用しているのはその内の2chです。 |