
(1996-1998)
This is a hexapod robot powered by 18 RC servomotors. The
degree of freedom of each leg is 3. I built this robot to
study the control software for 6 legged locomotion.
This robot can walk toward every direction, but the maximum speed
of progress depends on the direction. This robot is equipped with
radio control transmitter and can accept control by radio. In
develop configuration, this robot is connected to PC's parallel
port and control from PC with umbilical cable.
| Length | 550 mm |
| Width | 350 mm |
| Hight | 350 mm |
| Weight | 2600 g |
| Actuators | (18) Sanwa PWM servos (model SRM-1301) |
| Battery | Ni-MH battery |
| CPU | Z84C1106 (signal generator) PIC16C84-04 (RC interface) Win 95 PC (for development) |
Deveropment Record No.2
Higher resolution images are avalable by clicking small images.
 |
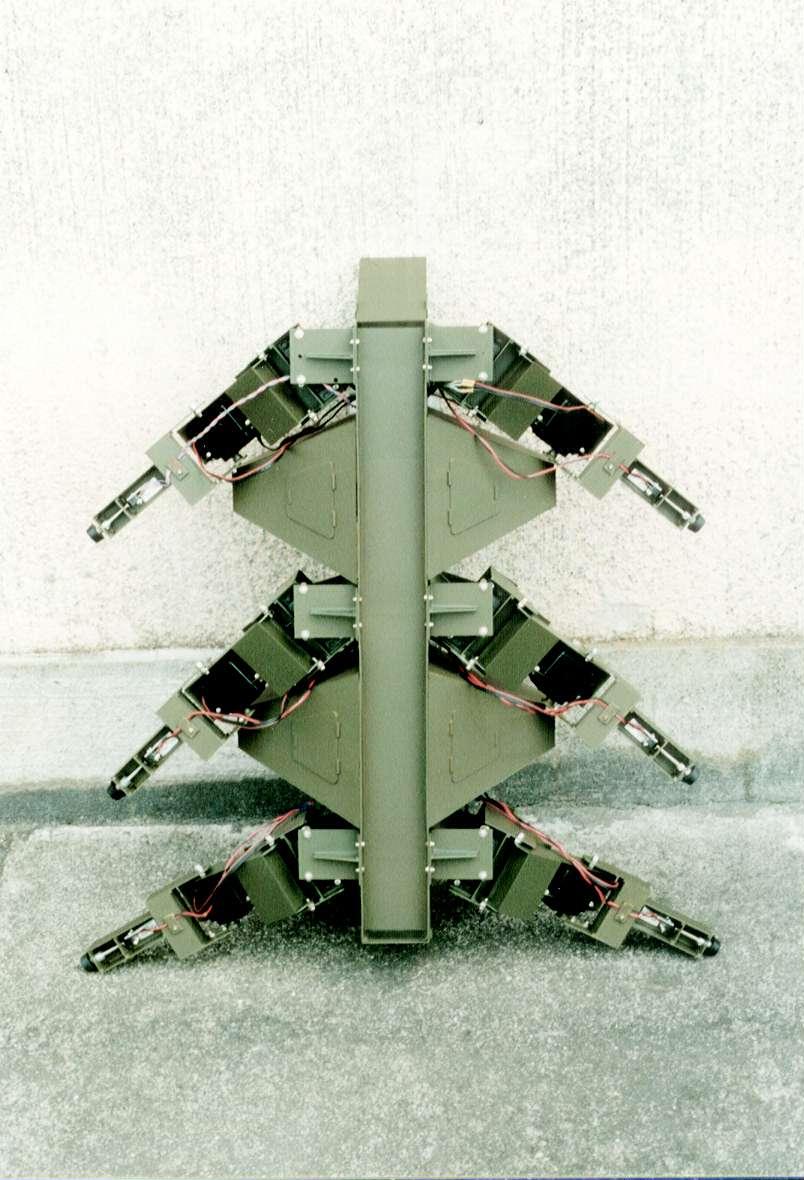
Front view of the robot. |
 |
Underside view of the robot. |
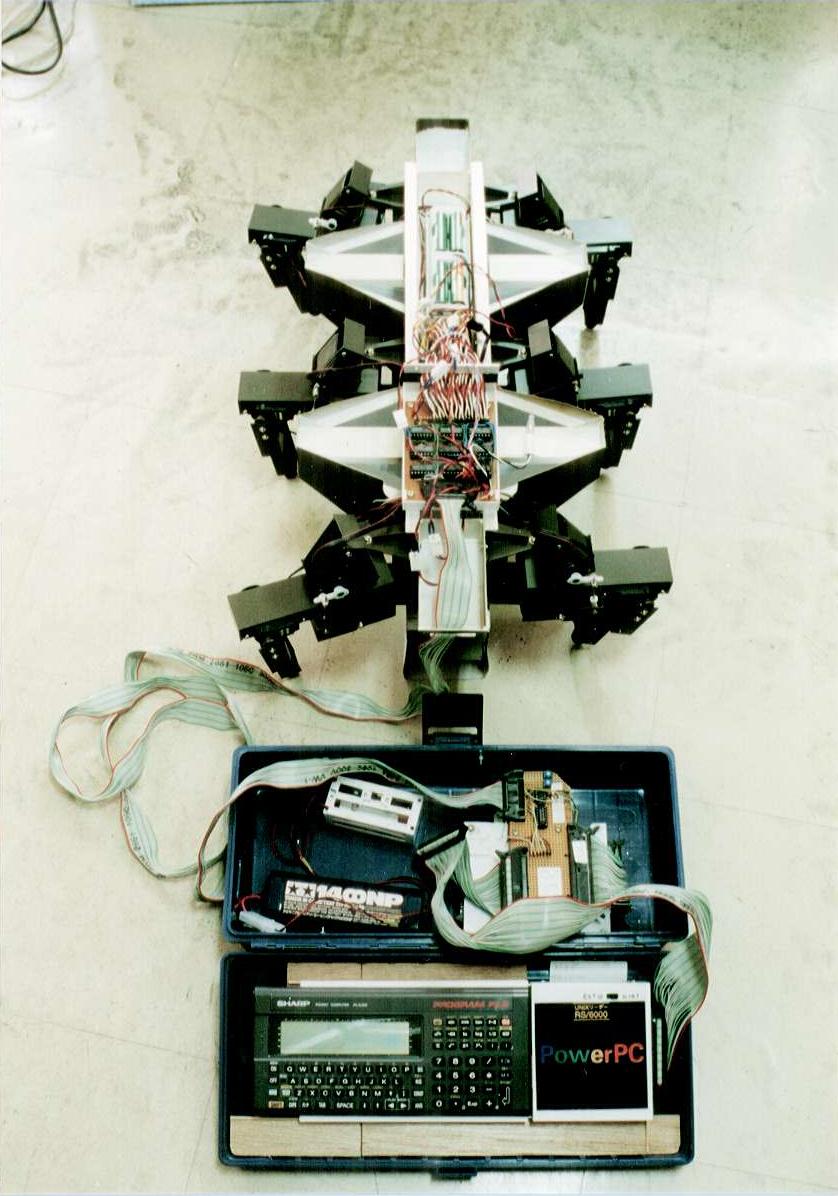 |
Remote control configuration via umbilical cable. The robot can be controlled with keypad of the pocket computer. |
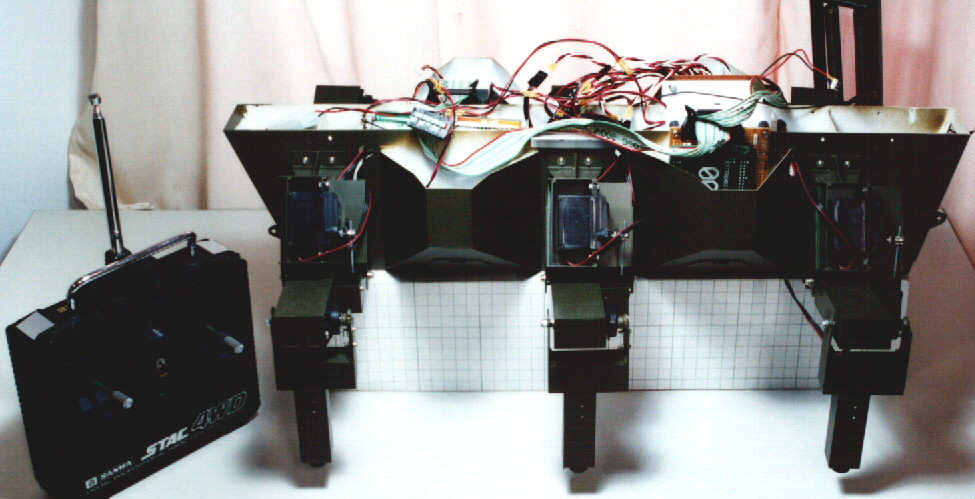 |
Remote control configuration via radio. |