|
Autonomous mobile robot W6 (Build 2001 - 2004) This is a mobile robot. I build this robot to study autonomous navigation based on visual data acquired by onboard camera. And to study the way of object handling by a pare of arms.
(8 for arms, 2 for neck, 1 for body, 2 for wheels) |

|

|
Biped robot 2l1/2L2(Build 2002) This is my second biped robot project. I build this robot mostly to study bipedal walking. This robot has 6 RC servomotors for each of its leg. Most of the structural parts is made from plastic sheets. (Styrene Resin).
|
|
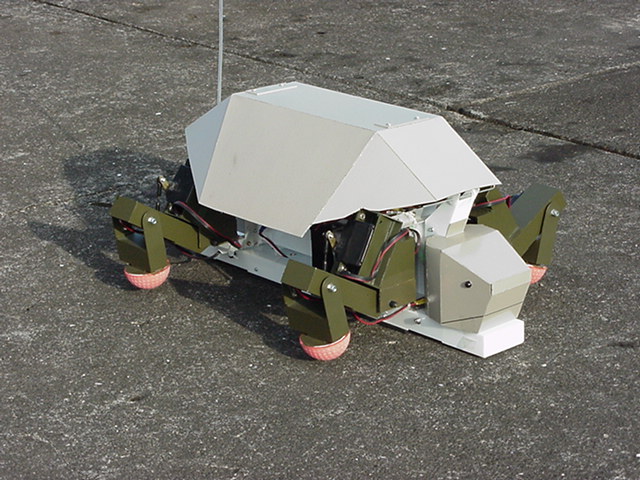
Quadruped robot 4L1(Build 2000) This is a quadruped robot walks like turtle. I build this robot to study quadrupedal walking. This robot has 12 RC servomotors for each of its leg. And has non powered driven retractable wheels under the body for sliding walk.
|
|

|
Hexapod Robot(Build 1998)
This is a hexapod robot powered by 18 RC servomotors. The degree
of freedom for each leg is 3.
The robot can be controlled like RC model car.
Movie |
|
Fish Robot(Build 1996)
This is a robot swim like fish. And powered by 3 RC servomotors.
I build this robot to study the control software for swimming
locomotion.
Movie |
|
