このロボットは、大きく分けて3つの部分から構成されています。私は、 上のほうから順にボディー、フレーム、脚ユニットと呼んでいます。 全ての部分を、なるべく軽量かつ十分な強度を持つよう留意しました。
参考書:構造設計の一般的な参考書としては、図書館の機械工学の コーナーにある「材料力学」と「構造力学」等があります。応用されたもの としては、建設機械がロボットの参考になりました。
戦車のような形をした部分で、飾りです。1mm厚の板の骨組みに0.3mm厚 の板を張りつけて作りました。
|
|
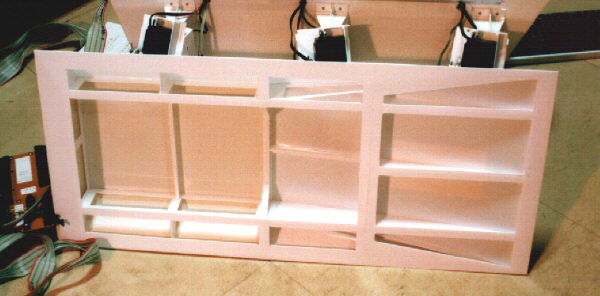
ボディーを裏側から見た写真です。骨組みの配置が分かります。 |
1mm厚の板で作った中空の直方体です。箱の6面が閉じていて、3対の脚の それぞれの根元の部分には仕切りが入っています。
フレームの鳥瞰図
脚ユニットの鳥瞰図です。(サーボ1のロッドは描いてありません)
サーボモーターの配置
脚ユニットを独立させ易いように、脚ユニット内部に設置してあります。
各関節に必要なトルクはそれぞれ違うのですが、関節構造の簡略化のため、
サーボ0と2はそれぞれ関節に直結しています。
サーボ1は、リンクを介して関節を動かします。レイアウト
の都合、直結では、自重を支えるに足るトルクが無いためです。
設計の方針
・後からでも脚の間隔を容易に変更できる様、サーボを脚
ユニットに内蔵し、それぞれを独立させる。
・出来るだけ脚の先端が届く範囲は広くする。
・なるべく軽くする。
・強度不足になりそうな場所は後からでも簡単に補強できるような余地を残す。
・脚のレイアウトは爬虫類タイプ(体を地面から持ち上げておくために
アクチュエータのパワーを必要とするタイプ)を採用する。
・足先は点接触扱いとする。
・2番サーボには脚の構造を補強する役目も持たせる。
・関節の寿命には目をつぶる。
|
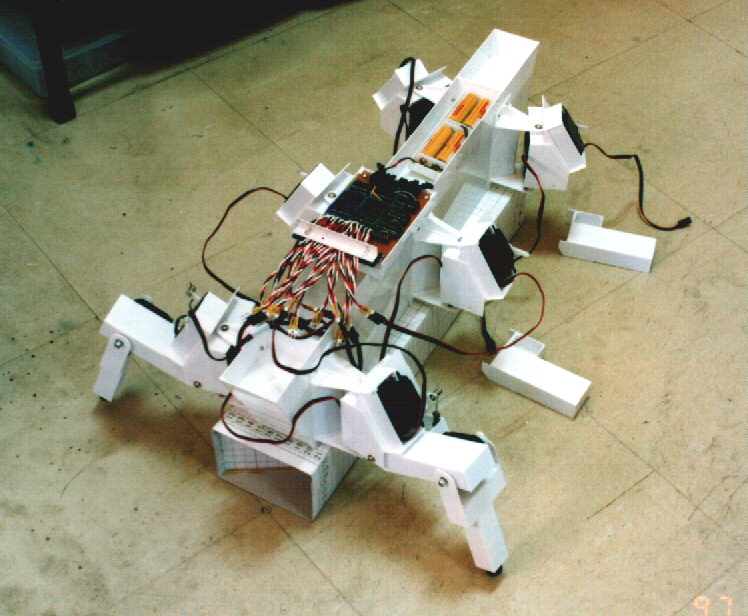
フレームと脚ユニットが、比較的良く分かる制作中の写真です。 |
動かしたときに、脚同士が干渉しないことのみ考えて1直線に配置して います。この配置ですと、3本ずつ脚を接地させる歩行パターンをとる とき、接地中の3本の脚には均等な荷重がかかりません。私の場合、ロ ボットが完成し、試験運転するまでそのことを忘れていました。まっ たく同じ脚ユニットでロボットを構成する場合、6角柱のそれぞれの面 に脚を配置するのが、荷重を均等にする面からは理に適っているようです。
サーボモーターの軸が、直に受けていないほうの軸受けは、全て 構造材のプラスチック板に、3mmのボルトを通しただけの簡単な 構造になっています。実験用の機体なので、12時間の稼働時間を、 動作に支障あるような大きなガタを出さずにいられれば、良しとし ました。

|
0番関節のサーボのクローズアップ写真です。この関節も2番関節 と同じように、3mmのボルトとサーボで関節を構成しています。 |

|
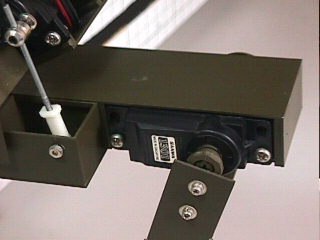
0番関節のクローズアップ写真です。脚ユニットをフレームに固定している 2mmのボルトも写っています。 |

|
1番関節のサーボのクローズアップ写真です。このように全てのサーボ は、3mmのボルト2本で脚に取り付けてあります。サーボとロッドは テトラ(ラジコン飛行機のメーカー)製の部品で接続してあります。 |

|
1番関節のサーボのクローズアップ写真です。ロッドと脚の構造とは 田宮製のボールアジャスター(1/12のRCカー用の部品)で接続してあります。 |
|
2番関節のサーボ側です。サーボの軸が関節の軸になっています。 脚の先端部分は、サーボホーンに2mmのボルト2本で取り付けていあります。 |

|
2番関節の軸側です。組み立てた状態です。 |

|
2番関節の軸側です。分解した状態です。 |

|
サーボを外して裏側から見た写真です。 |
以下の写真には後から追加した補強材が写っています。このロボットの サーボコントローラーは、電圧が下がってA3000が止まると、一定方向に サーボを振り切らせる信号を出します。ある日、電圧低下の兆候を見逃した 時に、サーボがフルパワーで振り切り、足が折れました。

|
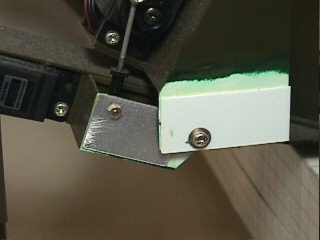
0番関節の上側に、0.5mm厚のアルミ板を接着するすることによって 補強しています。 |
|
1番関節の3mmボルトの周りに1mm厚のプラ番を重ねて補強しています。 ボールジョイントのところは、0.5mm厚のアルミ板を接着するすることによって 補強しています。 |