このページでは、実際に取りつけたセンサーと、今後取りつけるかもしれない センサーについて説明します。本機は歩行制御について実験するために 製作したロボットなので、自律移動に使用する外界センサーを搭載し ていません。
サーボモーターに内蔵されているポテンショメーター以外にはありません。 現在は、ポテンショメーターの出力を歩行制御に使っていませんが、 ポテンショメーターを読むことにより、現在の関節角度と負荷が分かるので 、ゆくゆくは読み込めるようにしようと考えています。
足の先端にマイクロスイッチを取り付けてタッチセンサーとしています。 足先が、地面に付くとONになります。凹凸のある地面を歩くときに使いました。 タッチセンサーを生かした歩行として、センサーがONになったら接地 したと解釈し、接地脚を切り替えるプログラムを試してみました。 このセンサーは、接地脚セットが完全に自重を支える位置にくる前に ONになるため、1歩ごとに胴体と地面の間隔が小さくなってきました。 足先接地の判断が単純でないことが分かりました。
本機に使用したサーボモーターには、発生トルクと消費電流がおよそ比例する 性質がありました。そこで主に自重を支える1番サーボの消費電流をモニター すれば、接地を知る間接的なセンサーとすることが出来ると思いました。 起動時の電流上昇と、接地時の電流上昇をうまく判断する必要があると思います。 機会を見て試してみようと考えています。
|
|
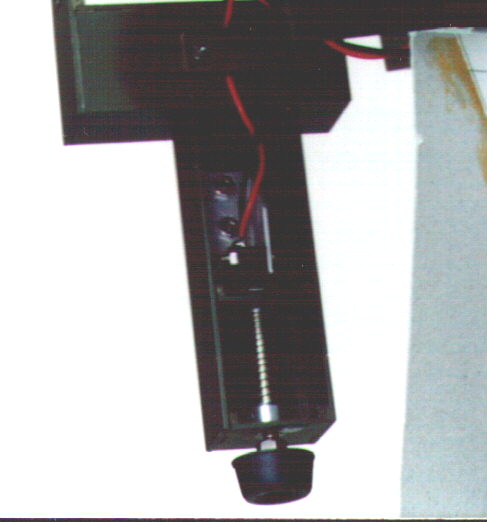
脚の裏側から見た写真です。ゴムの脚が3mmのシャフトの先にボルト止 めしてあります。このシャフトがスライドし、マイクロスイッチを 動かします。足の太さよりも、ゴムの先端部分の直径が小さいので、 足のプラスチックの部分で接地し、タッチセンサーが利かないことが 時々ありました。改善の余地あるレイアウトでした。 |
胴体が傾斜しているかどうかを知るための水銀スイッチです。 前後に傾斜するとONになるものと、左右に傾斜するとONになるものとの 2種類、4個の水銀スイッチがあります。前述のタッチセンサーを使用 したプログラムでは、 胴体のロードクリアランスが小さくなってくると同時に、1歩ごとに 傾斜してきます。これを正すために取り付けました。
|
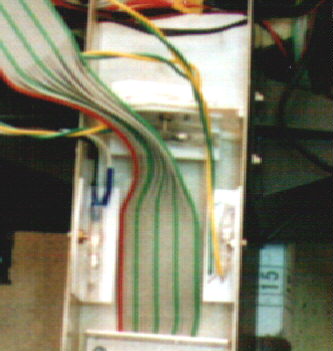
胴体後部のクローズアップ写真です。取り付け角度の微調整が利くように、 4個の水銀スイッチが付いています。PCから制御するときだけ使います。 操縦するときは外しています。 |
赤外線発光ダイオードとフォトトランジスタをペアにしたラインセンサーです。 ライントレーサーロボットによく付いているものと同じです。ロボット整備用の台 の決まった位置へ自動的に誘導する実験用に付けました。将来自律型にしたときに、 自動的に充電器(整備台)へドッキングする動作を想定してこの実験を行いました。
|
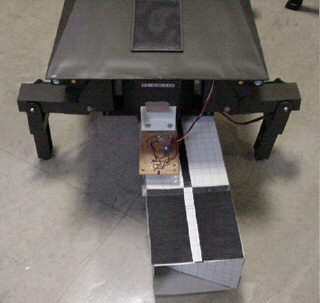
ロボットにセンサーを取り付けたところです。ロボットの下にある物が 整備台です。ロボット全体を左右に動かしながら、センサー出力を 読み込むことにより、整備台とその上に描かれた線を検出します。 線の白黒の反転を検出して台の端を認識します。 |
|
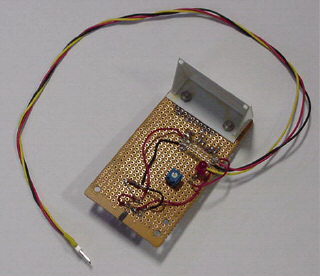
センサーユニットをとり外したところです。基板上面の赤色LEDで センサー入力を確認できます。 |
|
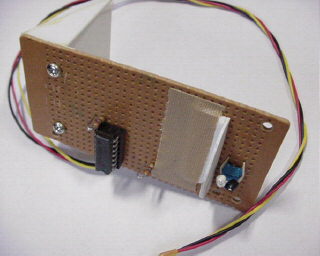
センサーユニット裏面です。赤外線LEDとフォトセンサーのマウント 方法が確認できます。 |