このページでは、制御回路について説明します。 制作し、テストするときの便利さや、別のロボットに 制御回路を転用しやすいことなどを考えて、回路をユニット化しています。 制御回路は、パラレルポート・アダプター、信号発生ボード、 信号分配ボード、センサーボード、RCデコードボード等のユニットからなります。
Win95PCのパラレル ポートに接続して使用します。74LS139,74LS273,74LS244で構成した回路です。 出力が24bit(8 bit × 3)、入力が8bitです。「トランジスタ技術」のバックナンバー に同じような回路の制作例を見つけられると思います。(例:2000年3月号)
|
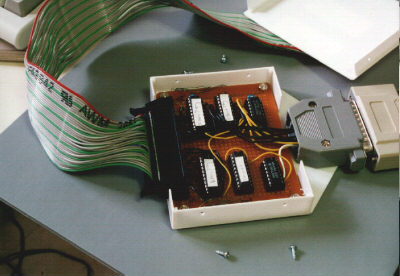
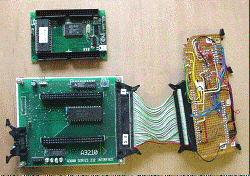
ボード外観:ボード右側の50PフラットケーブルがA3210から 来ています。20Pケーブルはロボットへ、40Pケーブルはパソコン又は ポケコンへつながります。このボードはパソコンの近くに置いて使用します。 ロボットへつながる20Pケーブルは、長さが3m程度あります。 |
|
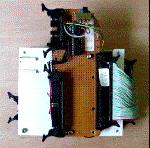
A3000とA3210が見える様に、1番上のボードを広げたところです。 A3210の左端の10Pコネクタは、パソコンとRS232接続するための コネクターです。プログラム開発時に使用します。 |
|
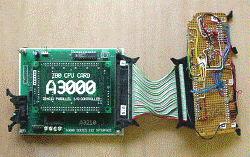
A3210からA3000を外したところです。 |

|
A3000です。クロックが6MHzと10MHzのものがあります。 私が使っているのは6MHzのほうです。8bit×5で40bitの パラレルポートと4チャンネルのカウンタタイマが付いています。 メモリはROM,RAMともに32Kbyteです。 |
|
出力信号:20Pフラットケーブルに出ている信号です。 8chの信号がまとまって 3系統(合計24ch)のサーボコントロール用信号になっています。 ロボットとボードをつなぐ ケーブルの本数を減らすため8chずつミックスしています。 この程度の距離ならば、周波数の低い 信号なので、ただIC同士を接続すれば問題なく動きます。 簡単な回路で済ませるため、信号は変調していません。 |

1ラインあたり8chずつ、上の「信号発生ボード」から送られてくる、3ライン合計24ch分の RCサーボ制御信号を、1ラインあたり1chの信号しか含まない、合計24本のラインに分けます。
ボード外観
足先のタッチセンサーや、胴体の傾斜センサーを接続してあります。 操縦するときは使用しません。
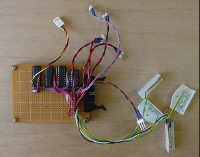
ラジコンの受信機が出す信号を4bitのバイナリコードに変換します。 PIC16C84-04をIPIのPIC-UNIBという基板に載せて使用しています。 ラジコンの受信機とは、フォトカプラを通して接続しています。

ボード外観
私の使用しているWindows95 パソコンのスペックを参考までに記します。 ロボットに使うにあたっては、慣れたものなら何でもかまわないと思います。 しかし性能が低いほど、プログラムの高速化やサイズ縮小に労力を取られるので 、なるべく高性能なパソコンを使うのが良いと思います。
機種 Aptiva Vision
メーカー IBM
CPU 80486 DX2 66 MHz
メインメモリ 32 M byte
ハードディスク 2.1G byte
OS Microsoft Windows 95(With IE5)
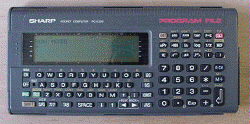
シャープのポケットコンピュータです。4MHzのZ80互換CPUと32Kbyte のRAMを搭載し、単3乾電池4本で数十時間使用できます。Z80のバスの信号が 、カードエッジコネクタで出ているのでワンボードマイコンとしても使えます。 1999年7月の時点では、まだ販売されていました。RS232接続でインテルヘキサ形式 のファイルを読み込める等ワンボードマイコンと同じ様に使えます。 またキーボードとディスプレイが付いているので、状況によってはこれで プログラムを開発した後で、ワンボードマイコン用のROMを作った方が 便利な事もあります。実行速度を重視しない時にはベーシックでプログラムを 作る事が出来ます。