���̃y�[�W�ɂ́A���{�b�g�Ɋ֘A���Ďv�������Ƃ�A���ʂ̓��L�݂����Ȃ��Ƃ������_���ɏ����܂��B
������x�܂Ƃ܂�����A���߂Ă܂Ƃ߂邩������܂���B
�������ݏ��́A�V����������Â����̏��ł��B
25.12.13 �������ۃ��{�b�g�W�@�Q�O�Q�T
���܂��s��������ꂽ�̂ōs���Ă��܂����B���j���̌ߌ�ƁA�y�j���ɍs���ĂЂƂƂ��茩�܂������A
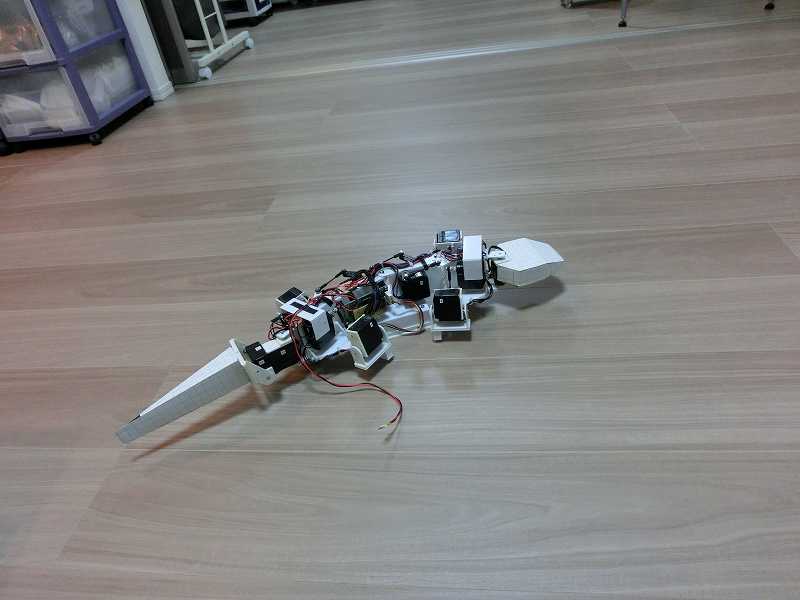
����͒������̃q���[�}�m�C�h���{�b�g�ƃT�[�r�X���{�b�g����R�o�Ă����̂�
�����ƁA�p�[�c���悭���Ă��܂����B��[�ޗ��Z�p�W���͋��j�܂łȂ̂ŁA���j����
���������Ɍ��Ă��܂����B�v�������Ƃ��ȒP�ɏ����Ă����܂��B
�q���[�}�m�C�h���{�b�g�p�Ƃ��ă��[�^�[�A�M�A�{�b�N�X�A�G���R�[�_�A�̓Z���T�[���~���`�Ɉ�̉����ꂽ
�A�N�`���G�[�^���j�b�g���A���ɂ��낢��ȃT�C�Y�Ŕ����Ă��邽�߂��A�����������ނˌ��܂����`�ɉ~���`��
���^�̍\�����ނłȂ����l�ȁA�قړ����ߍ\���^���R�x�̃{�f�B�[�փf�U�C�����������Ă��܂����B
�g���Ă���R���|�[�l���g���悭���Ă���̂ŁA�����ԃ��[�J�[�̌n��̊K�w�I�Ȃ��̂��o���Ă���
�̂��낤�Ǝv���܂����B�i���������Q�O�Q�R�N�̊��_�ƃt�F�A�Ō����_�ƃ��{�b�g�̕��i��
���������������[�J�[���������悤�ȁj
Unitree G1�̗l�ɁA�W����̊��Ԓ��A����I�Ƀt���R���^�N�g�{�N�V���O�̃f�����o����قǂ̑ϋv���̂���
���{�b�g���ʎY����Ă��āA���̐̂P����̂ɂ������Ă�����p��1/10���x�ōw���o����悤�ɂȂ����̂ŁA
�ŋ߂悭�����Ă��܂����AAI�����Ɖe���������ăq���[�}�m�C�h���{�b�g�̎��p����������C�ɐi�ނ���
�E�E�E�Ǝv���܂����B
�l�b�g�Ō����q���[�}�m�C�h���{�b�g����̓W������Ă��銴���ł������A���ۂɓ����Ă���Ƃ������
��ꂽ�̂�Unitree G1�݂̂ł����B���Ɋe���[�J�[�Ԃ̔\�͂ɑ卷�����Ă��āA�������i�ݎn�߂�
����̂��ȁ`�Ǝv���܂����B
���݂ł���Ă����̂łȂ�ƂȂ�����Ă݂��^��W�G���A�ɂ́A�j�Z�������֘A�̓W��������܂����B
�����́u���܂ł����Ă�������50�N��v�ň���ɋ߂Â��Ă��Ȃ��Ƃ�����ۂ������Ă��܂����B
�ŋ߂͏��ς���Ă��Ă���悤�ȕɂ��G��Ă��܂������A�W�������āu���������Ė{���Ɏ�����
�����߂Â��������v�Ǝv���܂����B
���̑��A���{�b�g�W�œ��ɂƂ����킯�ł͂���܂��A�l�b�g�łQ���y�тS���^�C�v�̃��{�b�g��
���āA���s���̊e��O����������@�Ƃ��ċ@�B�w�K�𗘗p���邱�Ƃ����ߎ�ƂȂ��ĉ���������
�����Ă��܂��B
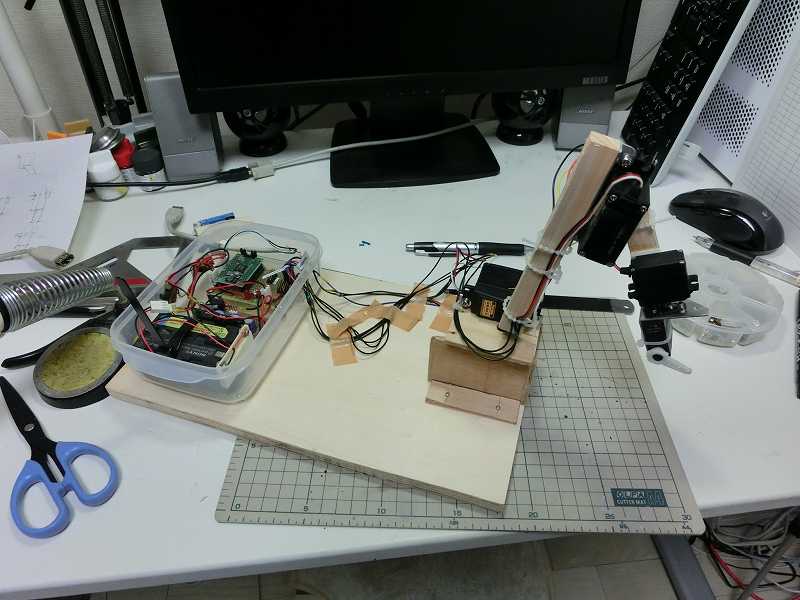
25.03.30 ���J�i���z�C�[�����
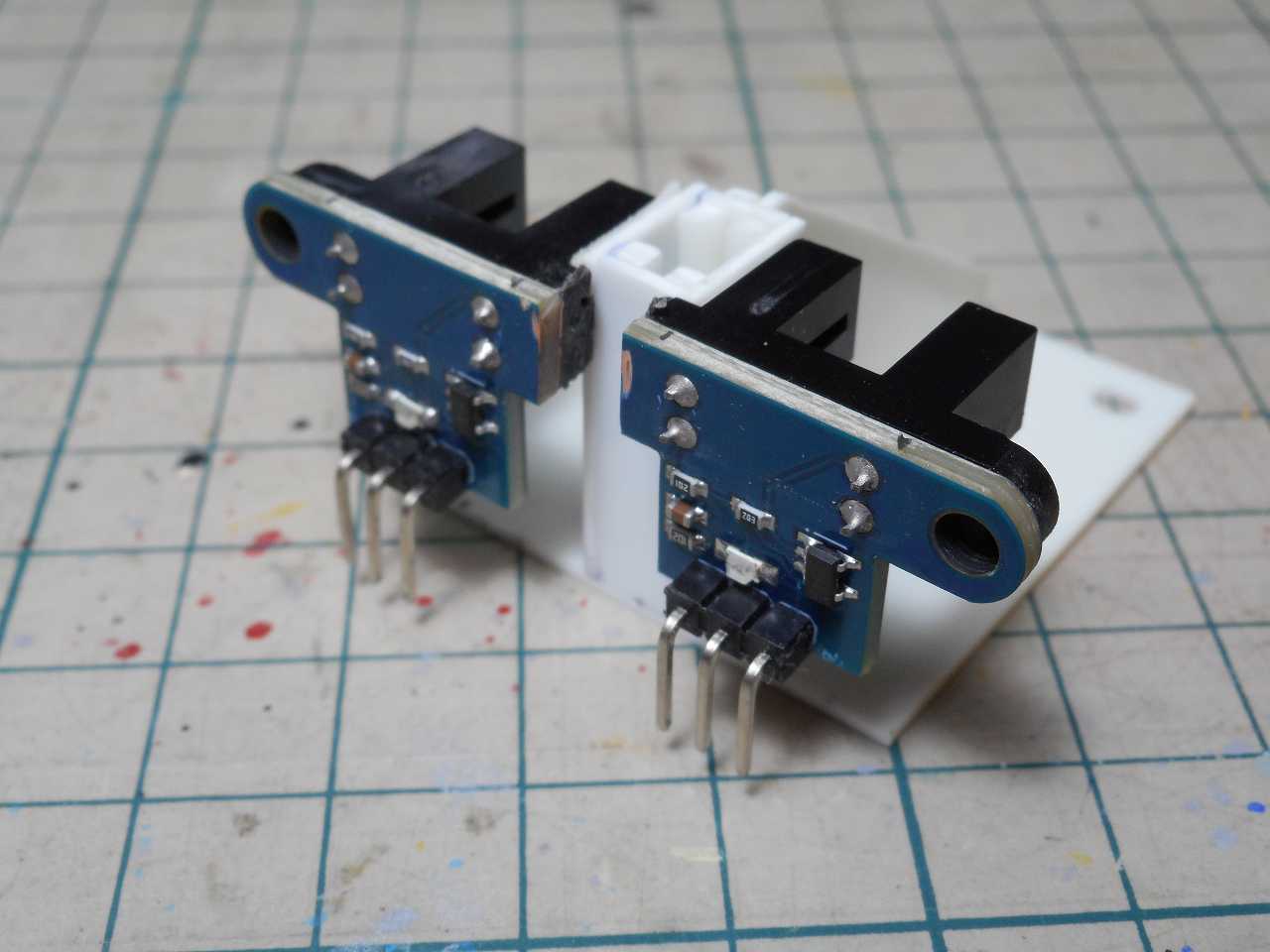
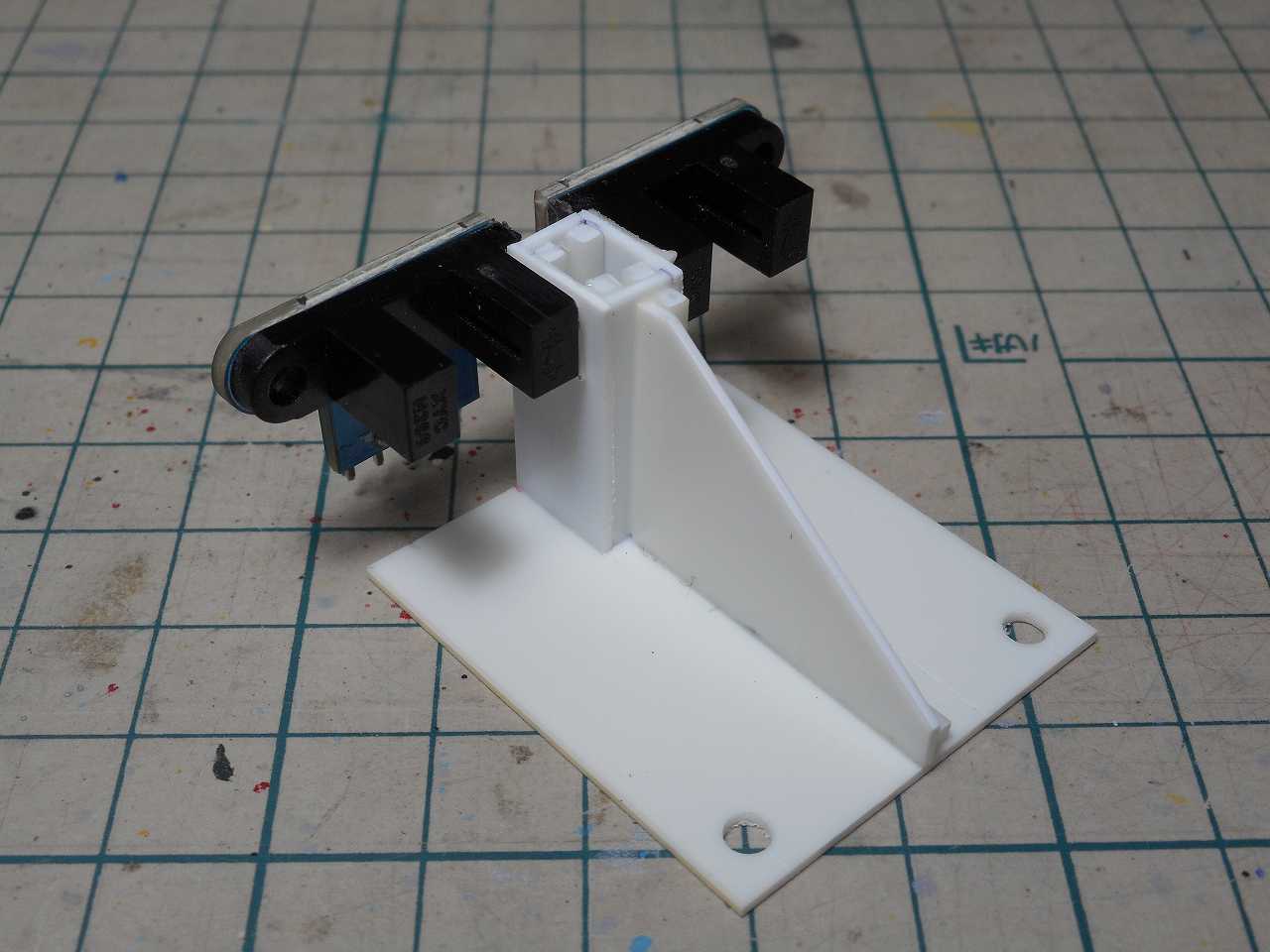
�Ԏ��G���R�[�_��t
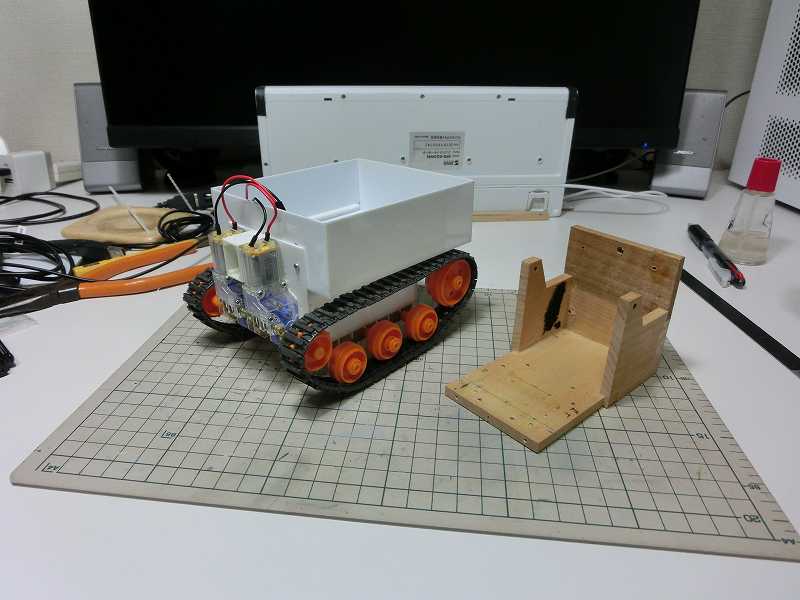
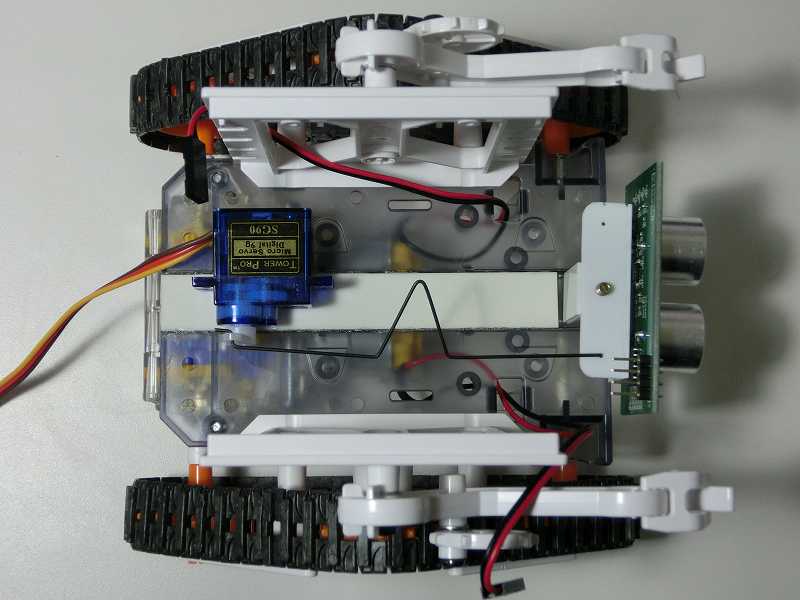
�ړ����{�b�g�̑�ԂƂ��ē������ɂ́A�Ԏ��̉�]�p�x�⑬�x�𐧌䂷��K�v������̂ŃG���R�[�_�[�����t���܂����B
�G���R�[�_�[�Ƃ��Ă�TT���[�^�[�p�̃f�B�X�N�ƃC���^�[�t�F�C�X��H�t���̃t�H�g�C���^���v�^�̃Z�b�g�Łi5�Z�b�g\749-�j
�����Ă�����̂�Amazon�ōw�����܂����B��t�̎菇�Ƃ��Ă͈ȉ��̗l�ɂȂ�܂��B
TT���[�^�[���A�o�͎��������֏o�Ă���^�C�v�ɕύX�B
�iAmazon�œ����M�A��̂��̂�������Ȃ������̂ŃM�A����ύX120:1��48:1�j
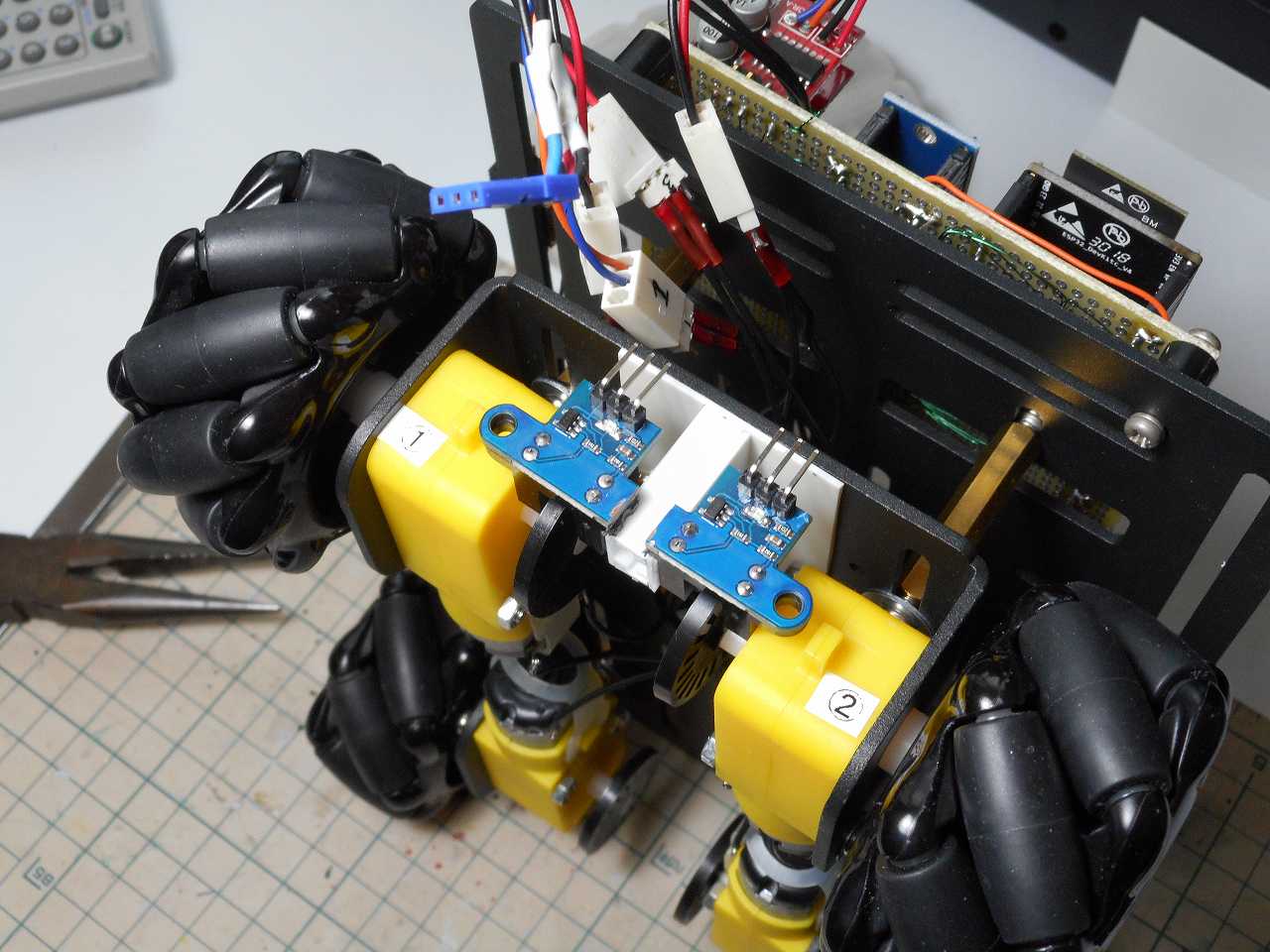
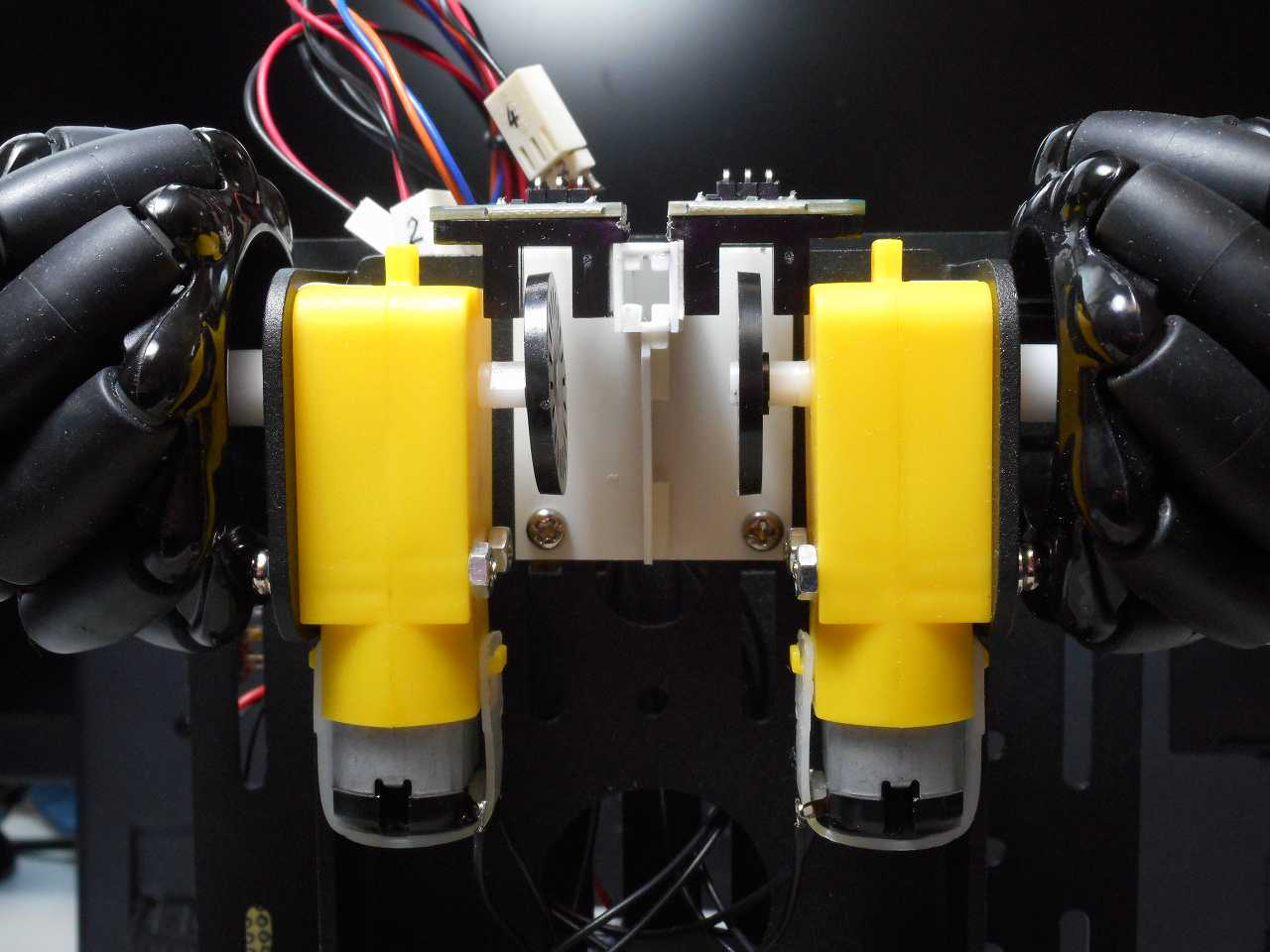
�t�H�g�C���^���v�^���Ԃ̃t���[���Ɏ�t����X�e�[���v���o���Ő���
�}�C�R���{�[�h�֔z��
�O�i�E��i�ȊO�̕����i�ނƂ��̃g���N�s�����S�z�ł������A�L�����c�ŗV��ł݂������ł͑��v�����������̂�
����v���O�����ɒ��肵�܂����BESP32�͂���܂łɎg���Ă����}�C�R���Ɣ�ׂăJ�E���^�E�^�C�}�������A�s���ւ�
���蓖�Ă��_��ȂƂ��낪�g���₷���Ǝv���܂����B
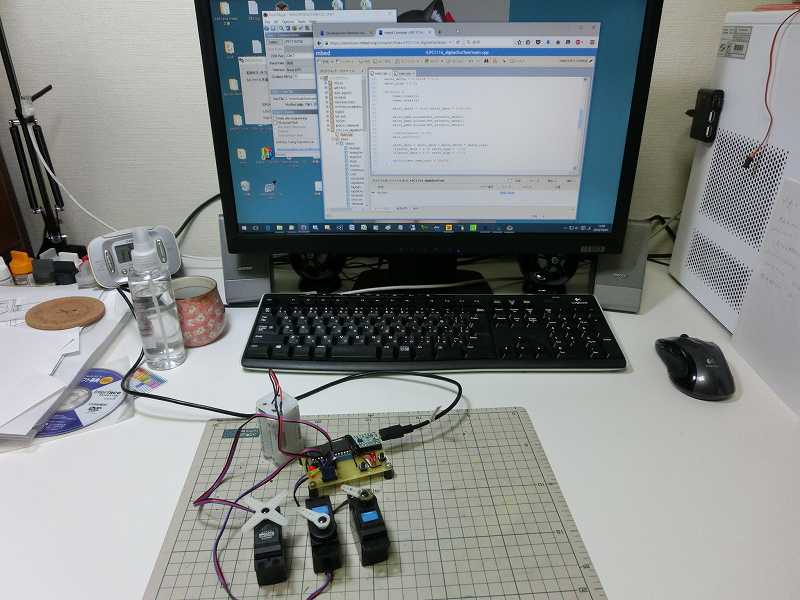
�X�}�z�ő��c
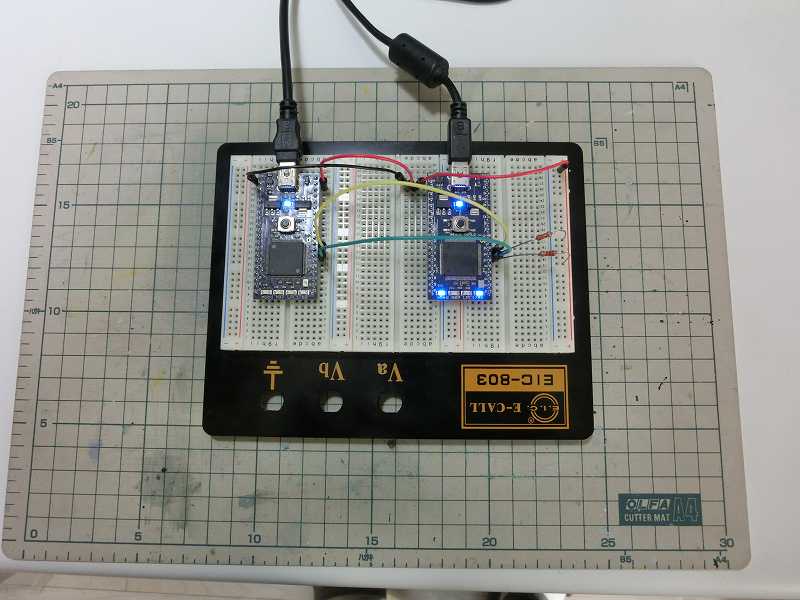
WiFi�t���̃}�C�R���o�R�Ő��䂷�邱����������Ԃ̍H��̗�ł悭��������u�X�}�z�ő��c�v������Ă݂܂����B
�����Ƃ��Ă̓}�C�R�����ŃE�F�u�T�[�o�[�����A���̃E�F�u�y�[�W���烂�[�^�[��ON/OFF����ɂȂ�����̂ł��B
�X�}�z����͓��ڃ}�C�R����Wi-Fi�A�N�Z�X�|�C���g�Ƃ��Č�����̂ŁA�����ɐڑ����ă}�C�R���̃v���O�����ɐݒ�
����URL�ɃA�N�Z�X����Ƒ��c�p�̃{�^����z�u�����y�[�W���\������܂��B
���J����Ă����\�[�X�R�[�h�̃��[�^�[ON/OFF���������ς��Ď����Ă݂܂����B
mbed�̑���������s
ARM�̃}�C�R����mbed�Ńv���O�������Ă��낢��ƍH��Ɏg���Ă��܂������Ambed�̃I�����C���R���p�C�����I�����Ă��܂��܂����B
�u����y�ł悩�����̂ɂȁ[�v�Ɛɂ��݂��A���ꂩ���ARM�̃}�C�R�����g���Ă䂫�����̂ŁA�����
IDE�����������s���Ă��܂��B
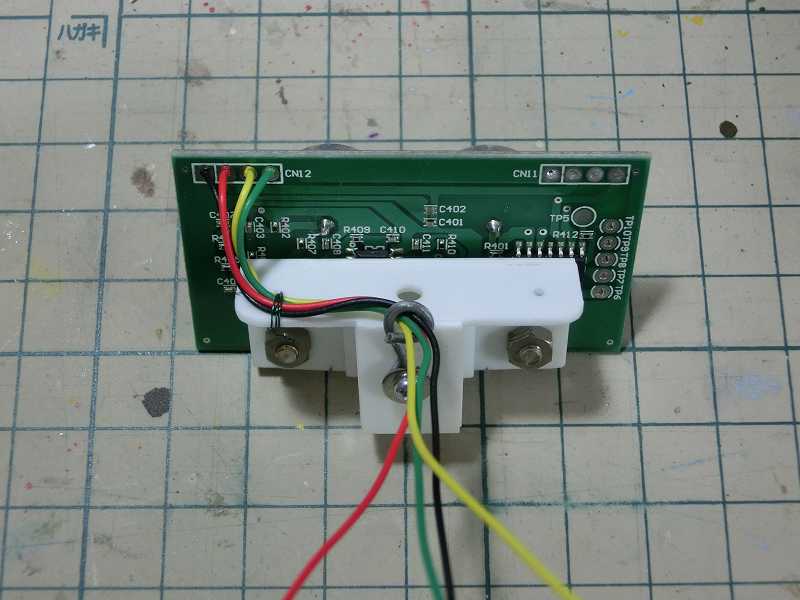
25.03.09 �o�b�̏�i�d�����j�b�g�j
�U���ɍw�����A�R���ڂɂb�o�t�̏�ŏC���ɏo�����o�b�ł����A���x�͓d�����j�b�g���̏Ⴕ�܂����B
�u�p���b�Ɖ������ēd�q���i�����ł���ُL�����Ă���v�Ƃ����p�^�[�������߂Čo�����܂����B
���Ă���Ƃ���ł̏o�����������̂ŁA�����ɓd���v���O���Ή����o���܂����B
���J�i���z�C�[����Ԃ̃R�[�f�B���O���̃N���b�V���łƂĂ��K�b�J�����܂����B
�O��͂b�o�t�����ƂƂ��ɁA�����肪�i�g�c�c������������ă��[�J�[����Ԃ��Ă��܂������A�����
�d�����j�b�g�݂̂̌����ŕԂ��Ă��܂����B�K���N���b�V���ɂ��f�[�^�̔j�������������ł����B
�����C�����Ԃ��߂���ƕԑ������[�U�[���S�̕ۏ�K��ł������A����̂悤�ȃP�[�X�̓��[�J�[���S�Ńs�b�N�A�b�v���̍���
�܂ł��C���Ŋy�ŗǂ������ł��B
�~�j�o�b�̍w��
�U���܂Ŏg���Ă����Â����̂o�b�����Ƃ֑����ċA�Ȏ��Ɏg���Ă��܂������A�����ɉ��Ă��܂��܂����B
�p�[�c�����Œ���Ȃ����Ƃ��Ȃ������Ȋ��G�ł������A�Â���Windows11�Ή��ł��Ȃ��̂ŏC���͂�����
���Ãp�\�R���ł������Ēu���Ă��������E�E�E�ƍl���Ă��܂������A�Ɠd�ʔ̓X�Ń~�j�o�b�����āA�����u�����h
�ɂ�����邱�Ƃ��Ȃ����ȁ`�Ǝv���AGMKtec��NucBox G3 Plus�Ƃ����o�b���Ă݂܂����B
�������Ƃ������Ƃň����Ȃb�o�t��N150�̃��f����I��ł݂܂����B
24.09.22 ���J�i���z�C�[�����
�\�t�g�E�F�A�J����
���炭�Ԃ������A�o�b���V���������Ƃ������ƂŃ\�t�g�E�F�A�J�������������܂����BArduino IDE 2.3.2 �ɂ��Ă݂܂����B
�o�b�̃\�t�g�p�͂o�b���V��������Ƃ����������R�ŁAVisual Studio 2022 �ɂ��܂����B�ߍ��̓T���v���R�[�h�Ƃ���
Visual Basic����C#�̕��������Ƃ悭��������̂ŁAC# �ō���Ă݂邱�Ƃɂ��܂����B
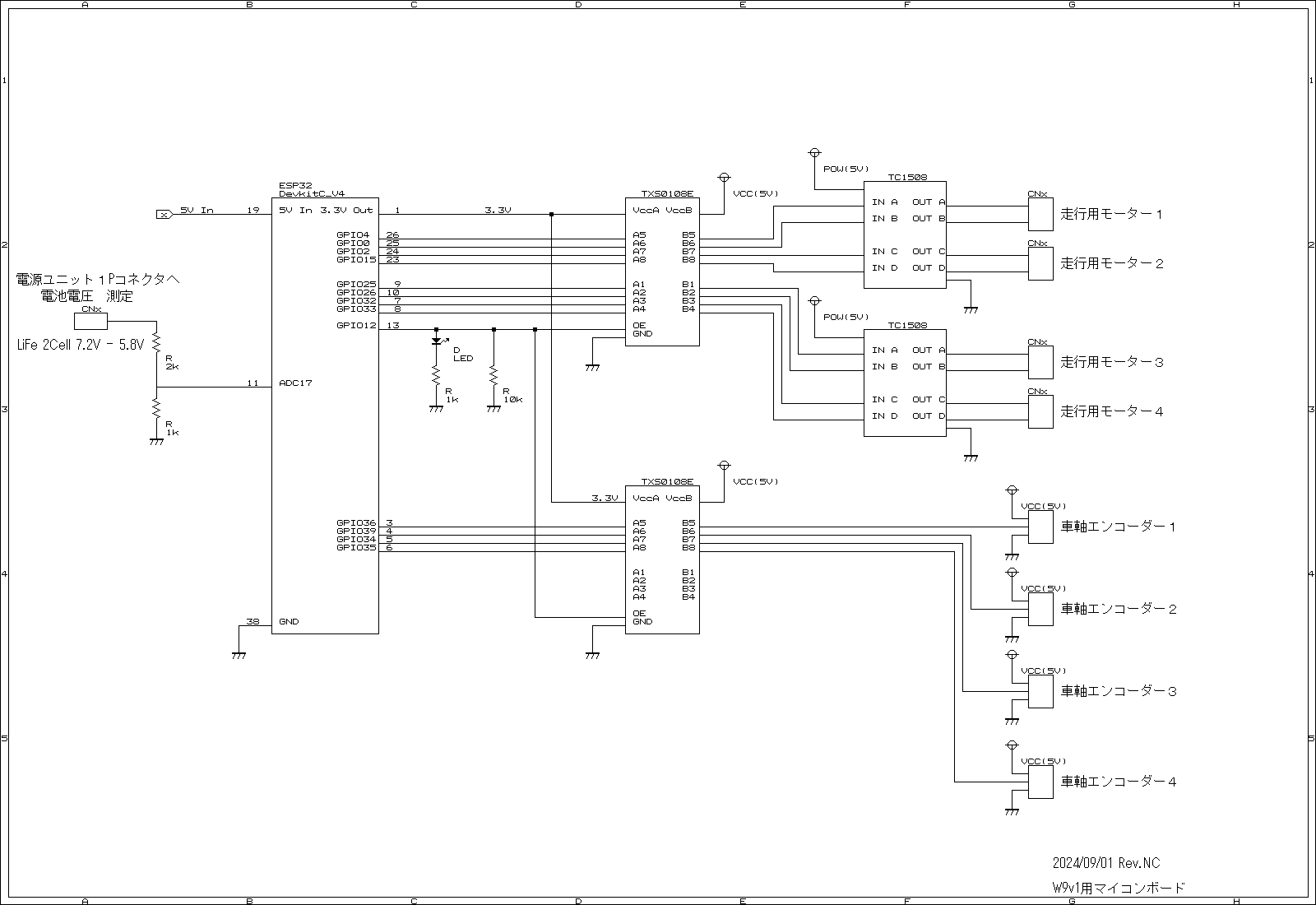
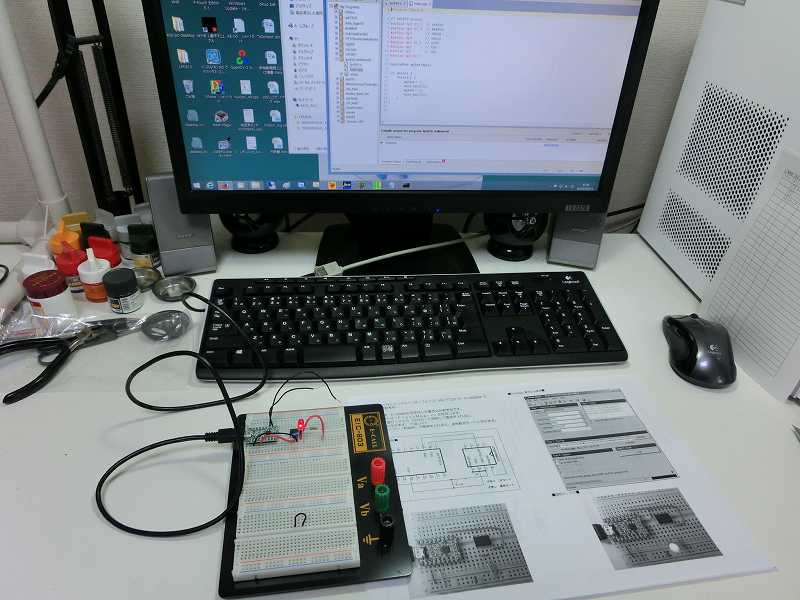
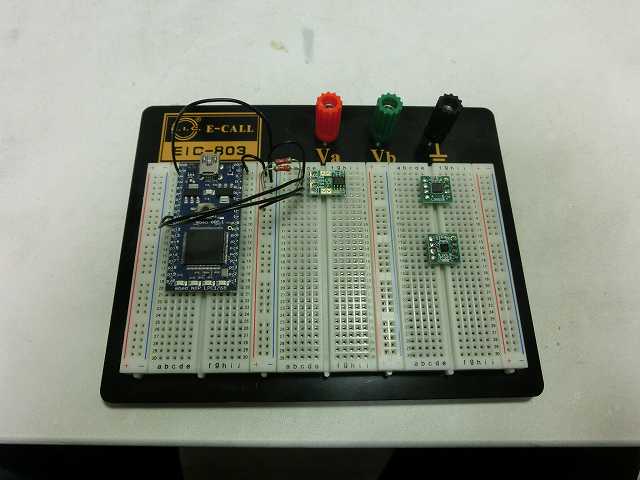
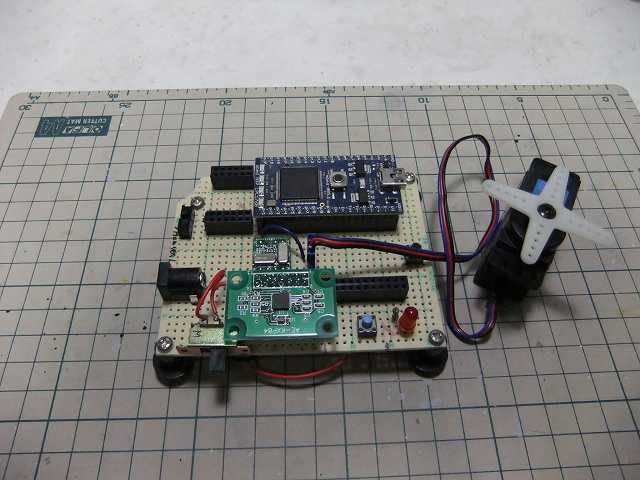
�}�C�R���{�[�h�̉�H
��ȃp�[�c
ESP32-DevKitC��Amazon��Arduino�p�ɔ����Ă���p�[�c��g�ݍ��킹������ł܂Ƃ߂܂����BESP32-DevKitC��IO�s����5V�g�������X�ł͂Ȃ�
3.3V�ł��邢���ۂ�Arduino�p��5V�Ȃ̂Ń��x���V�t�^���K�v�ɂȂ�A�ӊO�Ǝ��܂肪�ǂ��Ȃ���ۂł����B
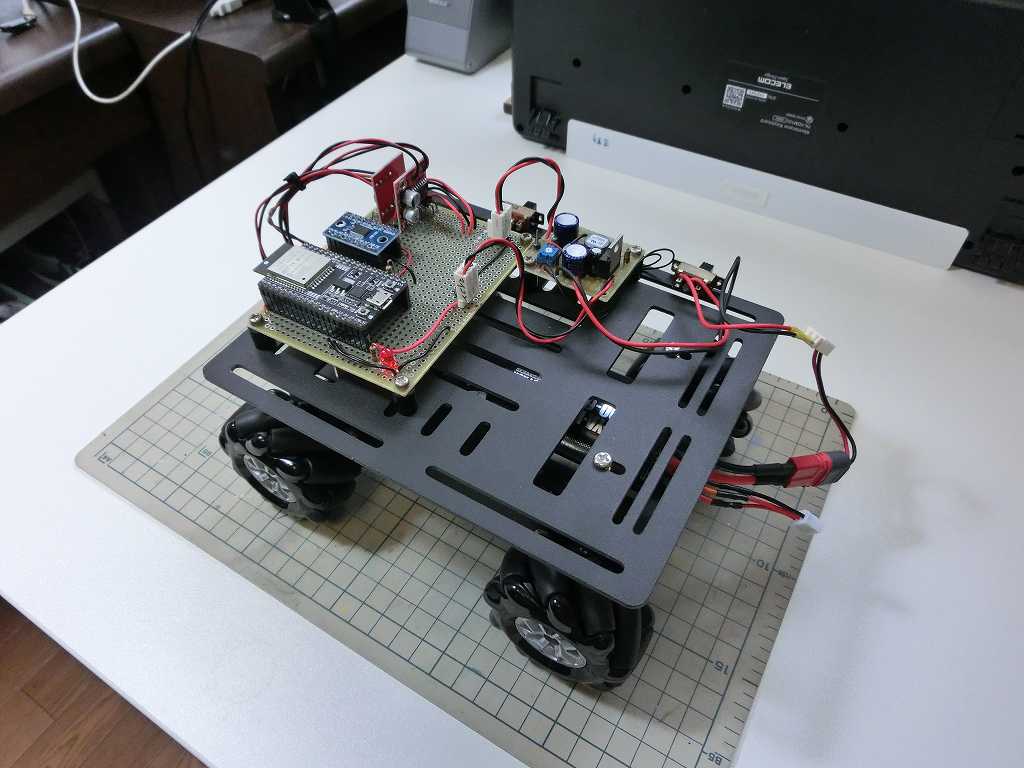
����m�F
���J�i���z�C�[���͏��߂Ďg���̂ŁA�e�ԗւ��ǂ��������Ƃǂ����ɐi�ނ̂��̊��o�����ނ��߁A�L�����c�o����悤�ɂ���
�V��ł݂܂����B�M�A��120:1��TT���[�^�[��5V�ő��点�Ă��܂��B���̏�Ԃŏd�ʂ�740g�ł��B2mm���̃A���~�t���[����
�d���ł��B
VIDEO
24.09.01 ���J�i���z�C�[����ԁi�L�b�g�ƃ}�C�R���{�[�h�j
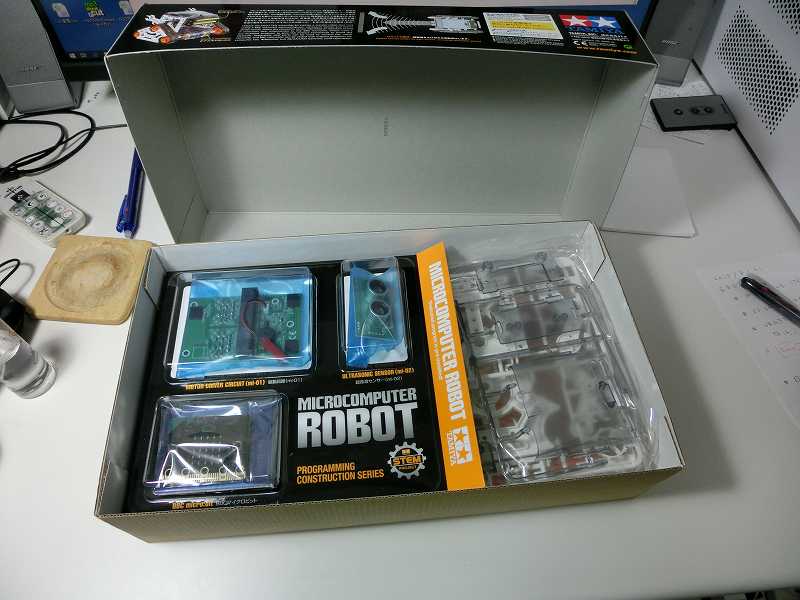
�ŋߗ��������Ă����̂ŁA���������������J�i���z�C�[�����g�����ړ����{�b�g�̑�Ԃ�
���n�߂܂����B�l�b�g��DIY����Ȃǂ�����ƃ��J�i���z�C�[�������Ƃ��납������Ă������������܂�
���A�����STEM�̋��ޗp�Ǝv�����V���[�V�L�b�g���w�����܂����B
Amazon�Ō��������ł��������̂炵���p�[�c���܂ރL�b�g����������o�Ă��܂����B�������̃L�b�g�𒆍���
�ʔ̃T�C�g���甃�����̂悤�ɁA���i�Ǘ��⍫����������̂��������ȕ��͋C�������̂ŁAprime�Ώۂœ��{����
���甭�������A���ԓI�ȉ��i�т̏o�W�҂��甃���Ă݂܂����B
���ۂɔ������̂�LewanSoul�Ƃ����o�W�҂���ō��݁�6,559-�Ŕ̔�����Ă����L�b�g�ł��B
24.07.24 �o�b�̍X�V���b�o�t�̏�
�uChrome�u���E�U�̍X�V������Ԃ́A�d���Ɏg���킯�ł��Ȃ��̂�Windows10��PC�̂܂܂ł��悢���E�E�E�v
�Ƃ����C�����܂������A�O��̂o�b�X�V����P�O�N�o�߂��AWindows11�ɂ��Ή����Ă��Ȃ��̂ōX�V���邱�Ƃɂ��܂����B
�@��F�}�E�X�R���s���[�^�[�@MHI5U01
���샍�{�b�g�p�ɔ�����������PC�Q��ɂ��āA2007�N�w���ŁA����Windows 10�����Ď��ƂɋA�������p�ɂ��Ă������SATA SSD��
���w�h���C�u���O���Ĕp���B2014�N�w���̕���Chrome OS�����Ď��Ɨp�ɂ���\��ł��B
�����^���T�[�o�[�̈����z��
���̃z�[���y�[�W��u���Ă���u������C���^�[�l�b�g�v����t�ɃT�[�o�[�X�V�̂��m�点�����Ă����̂ŁA�R���i�Əo���Ő扄���ɂȂ��Ă���
�x�ɂ����Ď��Ԃ��ł����̋@��Ɉ����z����Ƃ����܂����B�T�[�o�[�Ԃ̃R�s�[��ݒ�̈��p���͗\�ߗp�ӂ���Ă����{�^����łł��܂������A�n�r
�₻�̑����̃o�[�W�����A�b�v�ŕ\��������Ȃ��Ȃ����Â��X�N���v�g��������A������܂����B
24.02.03 ���z��
�o����̎d�����I������̂ŁA�܂������z�����ƂɂȂ�܂����B���Ǘ��������ĂȂɂ����悤�ȗ]�T�����ĂȂ�2�N�Ԃł����B���l����ڎw��
�����̋ƊE�̍H�ꌚ�݂̎d���������̂ŁA���������ă��{�b�g���͂��߂Ƃ��鎩�����@�킪�^�p����Ă��鏊�������ėǂ������ł��B
(��������i�߂��H��̃V�X�e���^�ݔ��̓������Ă���Ȃӂ��ɂ��`�݂����ȁE�E�E)
�w���̍��ɔ����̍H������w�ɍs���܂������A�N���[�����[�����D���ɂȂ�Ȃ������̂ŏA�E��Ƃ��Ă̓p�X�ł����B�������A�������̎d���Ƃ����ʂł�
��l�̉��l�������������E�E�E�Ǝv���܂����B
2010�N���̃A�[�X�E���[�o�[�O�P�ȗ��A�摜�F���̊W�Ɏ��t���Ă��܂���ł������A
�d���ʼn摜�F���V�X�e���̊J����S�����A�ŐV�ł�OpenCV.js�Ȃǂ��g���ɂ��ē����Ɣ�ׂĂƂĂ������ȒP�Ƀ��{�b�g�ɍڂ�����
�悤�ɂȂ��Ă��邱�ƂȂǂ�������܂����B��������m�����A�b�v�f�[�g���ꂽ�Ƃ���ŁA��y�Ɏg����悤�ɂȂ��Ă����@�B�w�K�̎�@�Ȃǂ�������A
���̓J������ςړ����{�b�g�ł���낤���ȁ`�ȂǂƉו����܂Ƃ߂Ȃ���l���Ă��܂��B
23.12.11 �������ۃ��{�b�g�W�@�Q�O�Q�R
4�N�Ԃ�Ɍ��ɍs���Ă��܂����B����͑O�ɍs�����Ƃ����炢�u�낢��ς�����v�Ƃ������u���オ�i�v
���������Ėʔ��������ł��B
SLAM�œ��������ړ����{�b�g�����i�Ƃ��Ĕ����Ďg���鏊�܂ŗ����B�������{�b�g���P����Ƃ��Ċm�������B
������ƈړ����{�b�g�����i�ɂȂ��Ă��ŁA�f���Ŋ�Ȃ��Ȃ������Ă����B
�������{�b�g�̐��i��ނ��������B�^�p�m�E�n�E���~�ς��Ďg����悤�ɂȂ����l�Ɍ������B
LiDAR�̗l��3�����Ŏ��͂�m��Z���T�����y�����B
�͊o�Z���T�����y�����B
�@�B�w�K�̐��ʂ����i�ɔ��f����Ă����B
�U���K�j�̊ώ@
���r���s���{�b�g�̎Q�l�ɁE�E�E�Ƃ������ƂŁA30�N�Ԃ肭�炢��5���̉��{�ɁA�ߏ��̐��H�ŃU���K�j
���P�C�߂܂��Ă��Ď����n�߂܂����B
��C�����悭������Ƃ���ɒu���Ċώ@���Ă���ƁA���낢��C�Â����Ƃ������Ėʔ����ł��B
�ړ����̋r�̋�������
�e�r�̐G�o�Ɩ��o�H�k�o�H�����˂��u�сv���e�r�Ŗ��x���Ⴄ����
������|��������́A�ق��肪�ς������l�ȏ�ԂɂȂ��Ă����̊Ԃɂ��b���̔w�����܂��Y���
�Ȃ��Ă���̂ŁA�Ȃ�ł��낤�Ǝv���Ă�����A�������߂̋r��7���R�x����A�w���╠���܂߂�
�̂̊e�������͈͂ɓ����Ă��āA�r�ł����藎�Ƃ��Ă��܂����B
���Ƃ͊߂̍\���ł����A�r�̍����������̘r�H���܂߂đS�ė��}�ɕ`�����悤��1�J���ӂ�P����
���Ȃ�����ɂȂ��Ă���̂ɋC���t���܂����B
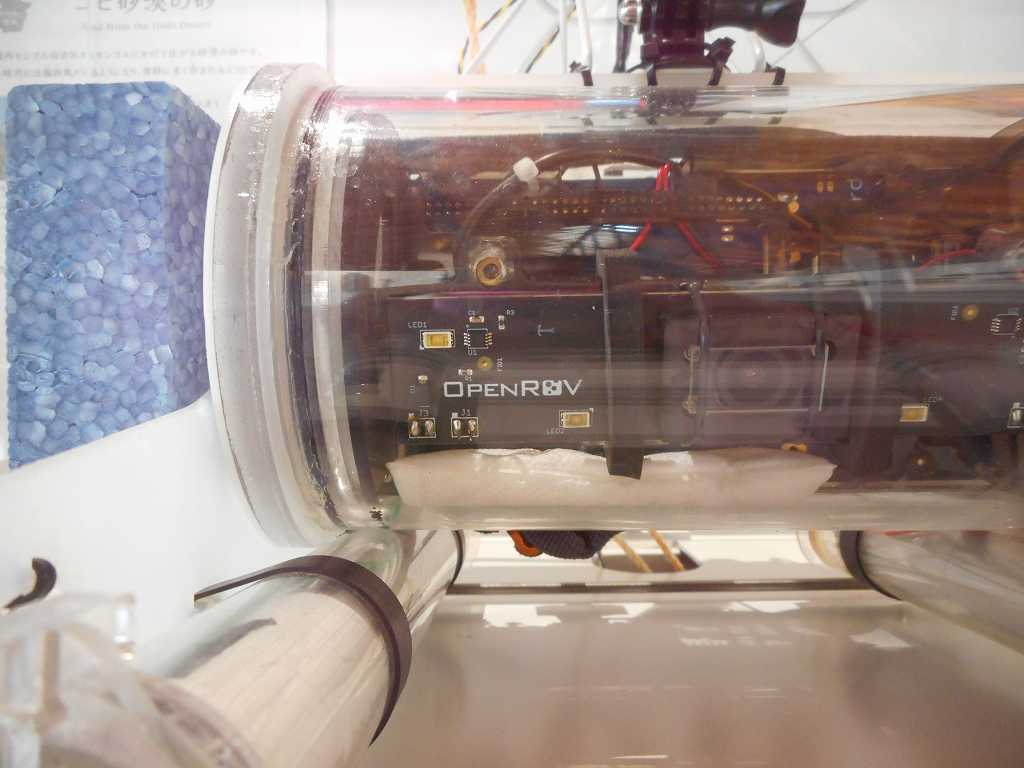
23.01.15 OpenROV
����������Ă�����������O�A���N��11���b�ɂȂ�܂����A�u���Ɉ����z���Ă��Ă���P����C�ӂɍs���Ă��Ȃ����A
���s�x��������Ă��邵�v�Ƃ������ƂŁA����s���₷���āA����܂łɍs�������Ƃ������������䌧
�̊C�������h���C�u���Ă��܂����B�r���Łu���䌧�N�Ȕ����فv�Ƃ��������̒ꂩ��̏W����7���N���̒n�w
���W�����Ă��锎���قɊ�����Ƃ��ɁAOpenROV���W�����Ă������̂ŁA�n�w�Ƃ͕ʂɂ悭���Ă��܂����B
22.08.29 �A�J�n���C����
�O��͑Ώۂ��A�������ĉ����A���Â��Ƃ���ō�����ʑ̂������̂ŕs���ĂȎʐ^�����B��܂���ł����B
�Ȃ̂ō���́A�R�r���Q�łS�k�Q�̃��[�V�����̎Q�l�ɓ�����Ƃ�ʐ^����蒼���ė��܂����B
���}�J�K�V
�ώ@���₷���ꏊ�ɂ����̂ł��������ʐ^���B���Ă��܂����B�����ɑ��ނ�֓����Ă��܂��̂œ����
�B��܂���ł������A���n->����->�ΖʂƊ��炩�Ɉړ����Ă䂭�l�q���ƂĂ���ۓI�ł����B����
���Ȃ��Ƃ���ɂ����ۂȂ̂ŁA�܂��B�e�Ƀg���C���悤�Ǝv���܂����B
22.08.15 �g�߂Ȑ�����
����܂ŏZ��ł����ߏ��ł͌������Ȃ������������̎ʐ^���B��܂����B
�k�[�g���A�F���X�Q�b�Ƃ��ăj���[�X�ȂǂŌ��邠��ł��B���ׂĂ݂�ƁA���X�͖є�ƐH�p�ړI�ʼnƒ{
�Ƃ��Ď����Ă������̂��A���i���l�������ĕ����ꂽ���̂Ƃ������Ƃł����B�A�����̂��̂��Ȃ�ł��H�ׂāA
���ƂȂ����Ă悭������Ƃ��낪�u�m���ɉƒ{�������ȁ[�v�Ǝv���܂����B
�������ԑтɂ��Ȃ��ꏊ�Ō�����̂ŁA�悭����ƁA���\���킢�������E�E�E�Ǝv���܂����B
�A�J�n���C�����F���w���̂���i1980�N�O��j�y�b�g�V���b�v�Ŕ����ĉ������Ă݂��L��������܂��B
���R�ɂ���Ƃ���͏��߂Č����̂Łu����ȂƂ���ɂ���[�v�Ƃ������ƂŊ����ł����B
�J�G���F�c��ڋߕӂł悭��������̂��B��܂����B�q���̂���ɂ悭�����A�J�K�G����S���������܂���ł����B
�l�b�g�Ō����b�𑍍�����ƁA���������ƂĂ������Ă��邻���ł����B
22.05.08 ���z��
21.12.26 ���z���̏���
�R���i�ō��ې����قƂ�ǔ�ׂȂ����Ԃ��������Ă��邽�߁u�d�����Ȃ��Ȃ�������z���v�̃p�^�[���ɂȂ��Ă��܂����B
�X�P�W���[���̏ڍׂ͂܂����܂��Ă��܂��A�Ȃ�ׂ��X���[�Y�ɉו����^�ׂ�悤�ɁA�挎���珀�����͂��߂܂����B
�����@��Ȃ̂ŁA���̂Ƃ���ֈ����z���Ă��Ă���P�T�N�߂��A���Ǎ�����܂܂̍ޗ��Ƃ��A����������
�u�������ɂ���͎g��Ȃ����ȁH�v�݂����ȓd�q���i�Ƃ��A�g�������Ƃ��Ȃ�����Ƃ��E�E�E�E���낢�돈�����܂����B
ARM CPU�p�̃R���p�C���ύX
���ꂱ��P�O�N�قǎg���Ă���mbed�I�����C���R���p�C���ł����A�I���\��̂��m�点�����܂����B�I�����C���}�j���A���������Ă���
�Ƃ������āu�����e�i���X����Ȃ��Ȃ��Ă��Ă���ȁ`�v�Ɗ����Ă��܂������A�͂����肠�ƂP�N�Ƃ������m�点�������̂�
�u���̋@��ɐV����IDE�ֈڍs���悤�I�v�Ƃ������ƂŁA�܂��͐��쒆�̂S�k�Q�p�̃R�[�h���ڂ����Ƃ���n�߂܂����B
�I�t���C��IDE��Mbed Studio�ƃI�����C��IDE��Keil Studio��Nucreo F401RE���ڂ̂S�k�Q�p�R�[�h���R���p�C��
���Ďg����������Ă݂܂����B
��ʂ̃��C�A�E�g���A�ƂĂ��悭���Ă��Ăǂ����ł��ǂ��悤�ȋC�����܂������A�I�t���C���ł̕��͍������_�Ńf�o�b�K��
�g�����̂ŁA���炭��Mbed Studio���g���Ă݂悤���ȁ`�Ǝv���܂����B
21.11.07 ���l�̃K���_��
10/14�ɁA�v���Ԃ�̋A�Ȃ̂��łɗ�������Č��Ă��܂����B�l�b�g�ʼn���������Ă���Ƃ����������ł������A
�����Ă���Ƃ���𑫌����猩�グ��ƁA���͂������ėǂ������ł��B�����͋Ă��Ă悭����܂����B
��������������Ƃ������ƂŁA�E�̓��ꌔ�������ďォ������Ă��܂����B�R���i��Ƃ������ƂŁA������āA
�����ʒu���Q�����i�̊��j�Ɏw�肳��āE�E�E�ƂP���ԗ������܂܂Ŕ��܂����B�r���ŖO���Ă������̂Őݔ��̃f�B�e�[��
�����Ȃ���A���ŏo���邩�ȁ[�Ƃ��A���̃A�g���N�V�����P�̂ō����ɂȂ�̂��낤���E�E�E�Ƃ��A�P�̍����ɂȂ�Ȃ�
�Ǝv�͂�邯�ǁA���ɂ͂ǂ��ɈӋ`�����Ă�낤�E�E�E�Ƃ��l���Ă܂����B
�ォ��߂Â��Č���ƁA�q��ՂȂǂŌ��������o���J���C�Ƃ��AF-15�̃W�F�b�g�G���W���̃T�C�Y��
��r���āA���Ƃ��A�����h�Z���Ƃ����������������܂����B
�S�̓I�ɂ́u���Ă悩�����ȁ[�v�Ǝv���܂����B
21.08.16 �A�J�e�K�j�̎���
�쉈���̎U���R�[�X�́A�ȒP�ɕ߂܂�����A�����݂ɑ�R����̂ɋC���t�����̂ŕ߂܂��Ă݂܂����B
2017�N�̃��N�Y�K�j�̎��́A�������c�菭�Ȃ����Ȍ̂������̂łP�J���قNJώ@���ă����[�X���܂������A���ׂĂ݂�ƁA
������͂P�O�N�قǐ����邱�Ƃ�����Ƃ̂��ƂȂ̂ŁA���炭���炭�����Ă݂邱�Ƃɂ��܂����B
�O�����猳�̏ꏊ�ɋA���Ă��悤�Ǝv���Ă��܂��B
21.03.14 �ݑ�Ζ��ƃA�o�^�[���{�b�g�ɂ��Ďv������
�����������͏T�̔������炢���ݑ�Ζ����Ă��܂��B���N�X�M�ԕ�����ԃV�[�Y���ɂȂ��
�u�V�[�Y���I���܂ʼn�Ђ֍s���Ȃ��čς߂����̂ɁE�E�E�v�Ƃ��l���Ȃ���߂����Ă��܂�����
���N�͏T�ɂQ�`�R���̏o�Ȃ̂ł����Ԋy�ł��B
21.03.07 �z�[���y�[�W�̈����z��
���̃z�[���y�[�W�̃G���A�Ɂu�U�O���łł���I���s���{�b�g�������v�̃_�E�����[�h�R���e���c�Ƃ���
�\�[�X�R�[�h�Ȃǂ��u���Ă��܂��B���Џo�ł���P�O�N�ȏソ���A�f�ڂ̃\�[�X�R�[�h���͍̂��ł��g���܂����A
Visual Studio�̃o�[�W�������傫���قȂ��Ă��܂����B�n�߂Ă̐l�ɁA���Ђł͏Љ�Ă��Ȃ��u�v���W�F�N�g�̃A�b�v�O���[�h�v����
�͂��߂�悤�Ɏ@���Ă��炤�̂��~�����オ��Ǝv���Ă��܂������A�����u�Ղ��v�́u�v���C�x�[�g�z�[���y�[�W�T�[�r�X�v
�̍ő�e��(100Mbyte)�̓s���ŃA�b�v�O���[�h�σv���W�F�N�g��u���܂���ł����B
�ŋ߂ӂƁA�ÓI�ȃz�[���y�[�W�p�Ȃ�A�����^���T�[�o�[�̔�p��������ł��Ȃ��i�肽�̂�10Gbyte��1����131�~�j����
�C���t���āA�z�[���y�[�W�̈����z�����v�������܂����B�i��Ȃ��獡�X�ł����E�E�E���j
���ʂ̉^�p�Ƃ��āA���Ђ̊����ł����̂t�q�k���Љ�Ă���̂ŁA�T�|�[�g�T�C�g�͂�����Ɏc���A����ȊO��
�R���e���c���R�s�[����Ƃ��납��n�߂邱�Ƃɂ��܂����B���Ȃ݂Ɉ����z����̂t�q�k�͈ȉ��ɂȂ�܂��B
https://k-y-yoshino.sakura.ne.jp/
�����z���ɂ�����A�Ⴆ��PC�̃p�������|�[�g�̗l�ɁA���ƂȂ��Ă͎g���Ȃ����ɂ��ẮA�ߋ��ɂ���Ȃ̂��������E�E�E
�Ƃ����悤�ȏ������ɉ��߂āA�R���e���c�����悤�Ǝv���܂��B�܂�����A�V�������e�͈����z����̕��ɉ����Ă䂱����
�l���Ă��܂��B
21.02.23 �v���Ԃ�̍X�V
�}�C�R�����{�b�g�H��Z�b�g (�N���[���[�^�C�v) 5
�ځH�̌���LED��t���Amicorbit��P0�AP1����쓮���Č��点�܂����B�j�[�A�I�[�g�}�^�ɏo�Ă��郍�{�b�g�i�@�B�����̂Ƃ������O�̕��j��
�ڂ̃��C�g��l�̏u���̎����œ_�ł����Ă��邾���ł��������\����������̂ŁA�茳�ɂ��郍�{�b�g�ł������悤�Ȋ��������邩�A�����Ă݂܂����B
I2C�X���[�u�̗��K
I2C�ڑ��̃Z���T�[���͂悭�g���Ă��܂����A������I2C�X���[�u����������Ƃ����������̂ŁA�ӂƁu�o���Ă�������֗����낤�v��
�v�������ALPC1768��2��Ȃ���I2C�X���[�u�̃v���O���~���O���K�����܂����B
���Ƃ��ẮA�}�X�^�[����P�b������1����15�̐��l�𑗂�A������X���[�u��LPC1768�̃��j�b�g���LED��2�i���\������A�Ƃ������̂�����Ă݂܂����B
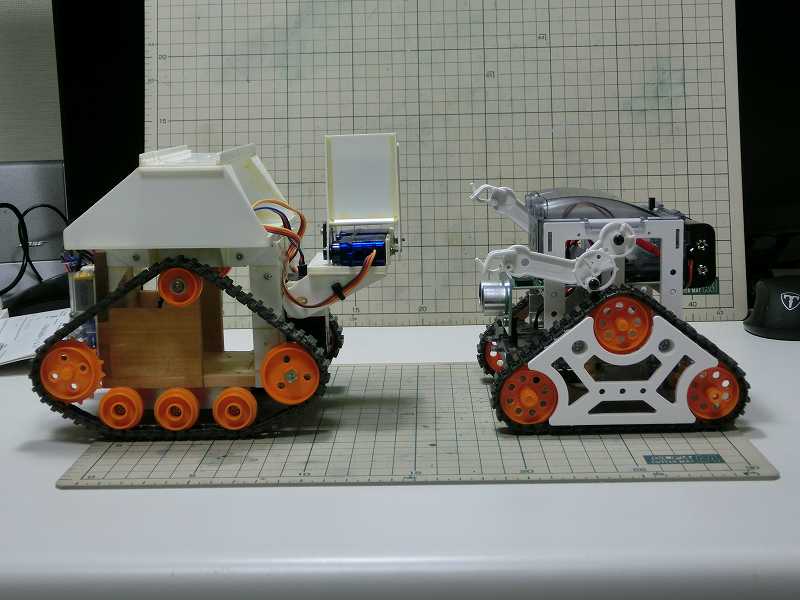
20.08.17 ��Ԃ̃��j���[�A���i�A�����N���[���[�j
���X�`�F�b�N���Ă���^�~���͌^�̃z�[���y�[�W�ŁA�V�����ɋC���t�����̂ő����w�����ĕt���Ă݂܂����B
���点�Ă݂�ƁA�N���[���[�̃J�^�J�^���������A���ۂ̏d�@���Ԃ̗l�ł��������ł����B
���̃N���[���[���N���[���[�̈�R�}���̍\���ƁA�d�@�̏ꍇ�ɓ��H�������Ȃ��悤�ɕt����p�b�h����
�\������Ă��܂��B�͂��߂́A���̃L�b�g�̏ꍇ�͊���~�ߖړI�ƂȂ�p�b�h��t���Âɓ������Ă݂܂����B�|���o�P�c��
�l�ȍގ��ŁA���̏�Ȃǂł͂ƂĂ�����₷���ł����A���̒�R�������ėǂ����Ǝv���܂������A
����Ղ��߂��ŁA�������������܂������Ȃ��Ȃ����̂ŁA���ǃp�b�h�͕t���܂����B
VIDEO
���̑��A���M�A�{�b�N�X���J�o�[����p�[�c�����܂����B�C����������h�����悤�Ǝv���Ă��܂��B
20.04.14 ��Ԃ̃��j���[�A��
�{�̕��̍ޗ��]�p
�{�̕�����邽�߂ɍw�������A�z�ƊȒP�ȍٖD����ꎮ�ɂ��āA�P�O�N�ȏ�̎������o�āA�ŋߘb���
�}�X�N�̍ޗ��Ƃ��ē]�p���܂����B�s��ł͂Ȃ��A����Ɏ��Ԃ��g���āA�ޗ������p�ł��āA�Ȃ��X�b�L�����܂����B
���Ȃ݂Ɏ{�Ƃ����A����̓r���ŁA�d���̓s���ɂ������z��������A������ƒ��f�E�E�E�̂��肪�A
���ꂫ��ɂȂ��Ă��܂��܂����B�B�B�B
20.03.04 ���C���o�b�̌̏�
���C���o�b���w������T�N�ڂƂȂ�u���낻�딃���ւ��E�E�E�v�Ǝv���܂������A�d���̂o�b�́A�����ւ��Ďg���Ă݂Ă�
�������Đ��\���オ���Ă��Ȃ��Ɗ����Ă������肵�Ă��܂����B�����ŁA���܂���o�b�����������R���|�[�l���g�̓���ւ����y��
�~�j�^���[�^�f�X�N�g�b�v�Ȃ̂ŁA�T�N�O�����P���������ԉ��������������[�̑��݂ƁA�b�h���C�u�̂r�r�c�ւ̊��������܂����B
�ȑO�AER01�ɍڂ��Ă���DELL mini-9��SSD�����������Ƃ��́AC�h���C�u�̕s�ǃZ�N�^�̏C������A�f�B�X�N�E�N���[���c�[��
�𗘗p����C�h���C�u�̃N���[�������܂��������̂ŁA����������v�̂Ői�߂��Ƃ���AC�h���C�u��chkdsk /r��������A
�܂����Ƃ��낪���Ă����悤��Windows���N�����Ȃ��Ȃ��Ă��܂��܂����B
����Ȃ������ŁA��ꂽC�h���C�u���N���[�����Ă����傤���Ȃ��̂ŁA�ŐV��Windows10�̃C���X�g�[���[�𗘗p����
�N���[���C���X�g�[���ƃo�b�N�A�b�v�f�[�^�̃��X�g�A��
�s���܂����B���łɃT�|�[�g���I����Ă���\�t�g�iVisual Studio�Ƃ��j�̃o�[�W�����A�b�v�Ȃ����܂����B
Windows�̃C���X�g�[���́A�ʂ̃m�[�gPC�Ń}�C�N���\�t�g�̃T�C�g����_�E�����[�h���AmicroSD�J�[�h�ɃR�s�[����
�C���X�g�[���C���[�W����ł��āA�y�ł悩�����ł��B�ŋ߂̃m�[�gPC�͌��w�h���C�u���t���Ȃ��̂��W���̗l�Ȃ̂ŁA���̓_��
�l������Ă��Ċ��S���܂����B
CPU�ƃO���{�̐��\������ɏo��悤�ȏ����͕ς��܂��A�f�X�N�g�b�v�̑���ɋN�����鏈���������������A���K��
�Ȃ�A���ʓI�ɂ͗ǂ������Ǝv���܂����B
19.10.06 �}�C�R�����{�b�g�H��Z�b�g (�N���[���[�^�C�v) 4
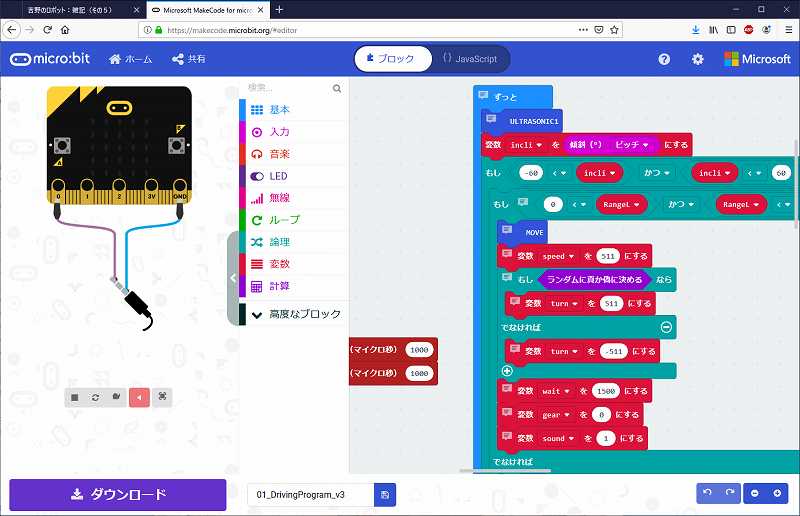
����܂ł�Microsoft MakeCode�ł��̃��{�b�g�̊�{�@�\�������Ă��āA�u���b�N�v���O���~���O���ǂ�Ȃ��̂�
�����������������l�ȋC�����Ă��܂����B�����ŁA���̃v���O���~���O��i�������Ă݂悤�ƌ������ŁAMicrobit Python editor��
�����J�X�^�[��w�̃����^�C�����g����mbed�������Ă݂܂����B
Python�̕���Python���̌��������̂Łu���ꂪ�v���O���~���O�̕~�����Ⴂ�ƌ��������`�v�Ǝv���܂����B
mbed�̕��́A�J���������{�b�g�̍\�������ꂽ�^�C�v�Ȃ̂ł������肫�܂����B
���̐悵�炭�́A��r�I�J���������ǂ��̂ŁAmbed�ł��낢�����ėV��ł݂悤�Ǝv���܂����B
19.09.23 �}�C�R�����{�b�g�H��Z�b�g (�N���[���[�^�C�v) 3
19.09.23 �}�C�R�����{�b�g�H��Z�b�g (�N���[���[�^�C�v)2
�m�[�}����ԁH�ŏo���邱�Ƃ���ʂ����Ă݂�[�Ƃ������ƂŁA�^�~���͌^�̃T�|�[�g�y�[�W����_�E�����[�h����
�T���v���v���O�������x�[�X�ɁAMicorsoft make code�ŏo���邱�Ƃ����낢�����Ă݂āA�u���b�N�v���O���~���O�H
�r�W���A���v���O���~���O����H��̌����Ă݂܂����Bmicrobit�̃V�~�����[�^���悭�ł��Ă���̂ŁA���w�Z�̎��ƂȂ�
�ł́Amicrobit�̎��@�����ł��A�V�~�����[�^�����ŏ\���u�v���O���~���O�̌��v�ł��邩���E�E�E�Ǝv���܂����B
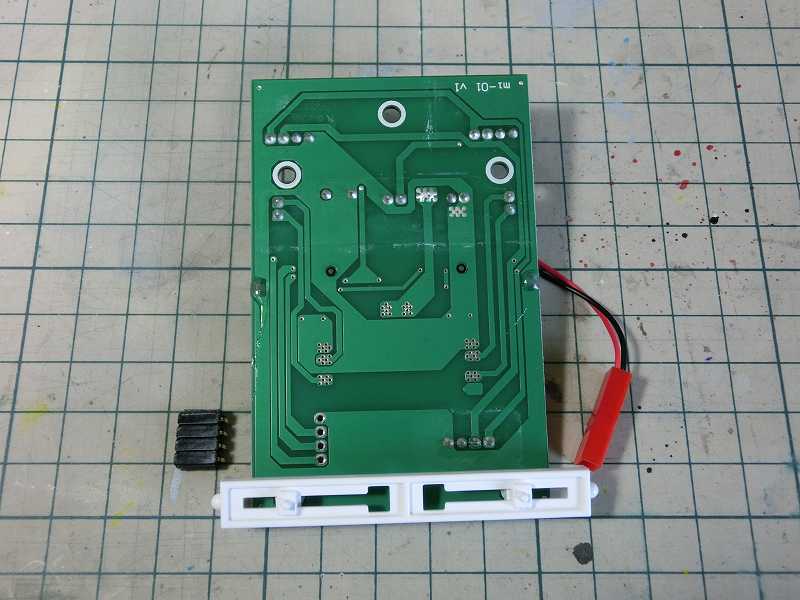
��ʂ�V��ŁA�u�쓮��H�@mi-01�v���O���Č��Ă݂�ƁA�s���\�P�b�g���t�����邯��ǂ��t���Ă��Ȃ�
�ꏊ�ɋC���t���܂����B���ʃe�X�^�[�ŊȒP�ɒ��ׂ��Ƃ���P0�AP1�AP2���o�Ă����̂Ńs���\�P�b�g��t���Ă����܂����B
Micorsoft make code�̃u���b�N��P0, P1, P2��RC�T�[�{���Ȃ��œ��������̂��������̂ŁA
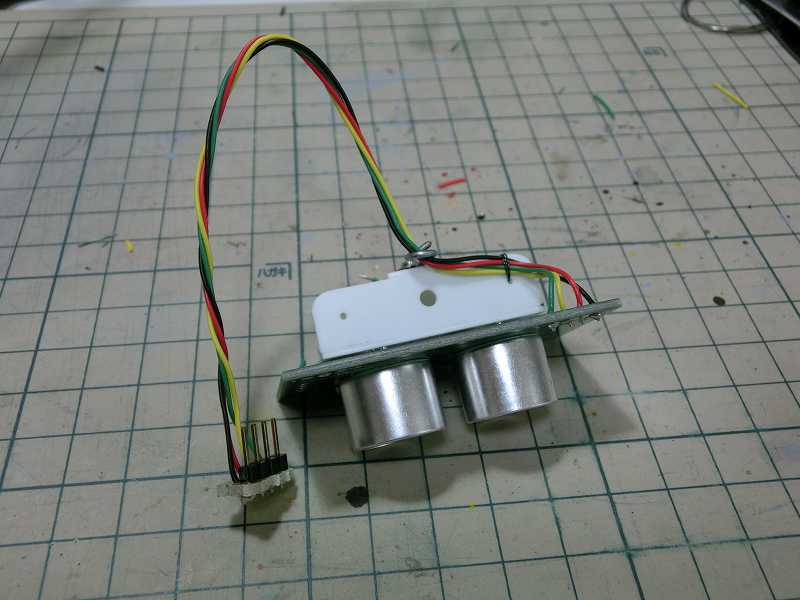
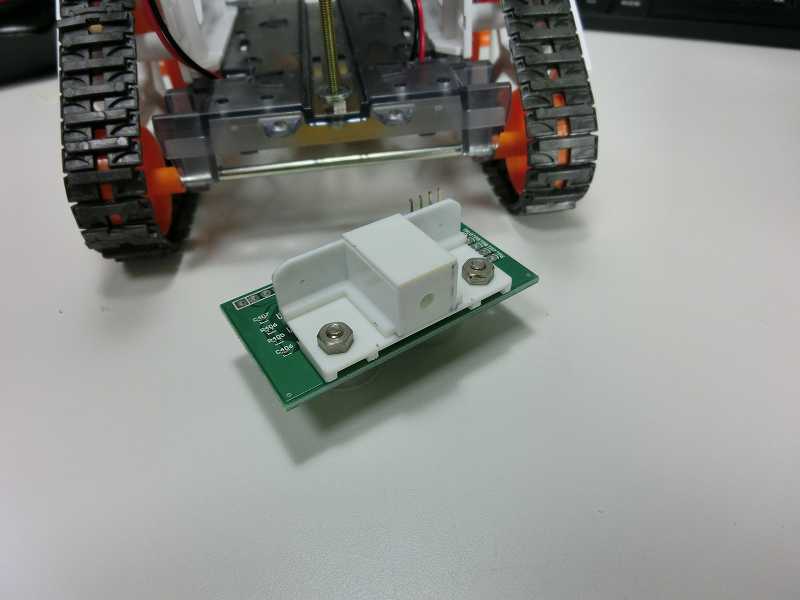
�����g�Z���T�̎�U��p�ɍڂ��Ă݂܂����B
19.09.08 �}�C�R�����{�b�g�H��Z�b�g (�N���[���[�^�C�v) 1
�É��̃z�r�[�V���[�œ����Ă���Ƃ�������āA�����ڂ��C�ɓ����ė~�����Ȃ�A�ł����łɎ����悤�Ȃ̎����Ă邵�ȁ`
���Ɩ����Ă��܂������A�ǂ�Ȃ��̂��A�J�����ɓ��ɋ����������āA���̂����������Ǝv���Ă���microbit�̈ꕔ���`
�Ɨ��R�t�����Č��Ǎw�����܂����B
�V���x���h�[�U�[��{�H��Z�b�g���x�[�X�ɍ��n�߂����肪�A���ƂȂ��Ă͖ؐ��t���[���ȊO��
���̕��i���������W�ƕ��ׂĂ݂܂����B
VIDEO
19.09.01 ���̂P�N�قǂ̎ʐ^�F�X
�P�����G�L�ɏ������E�E�E�Ǝv���Ă��邤���ɁA�����ԗ��܂��Ă��܂����B
���i�W�{�^���̘b
�܂����r���s���{�b�g����肽���ȁ[�ȂǂƎv���A�����Q�l�ɂȂ�Ȃ����Ƃ��l���Ȃ���A
���A��ōs���鐅���فA�������A���R�j�����قȂǁA���܂łɍs�������Ƃ̂���ꏊ�ɍēx
�i�ꏊ�ɂ���Ă͂P�O�N�Ԃ肭�炢�j�ōs���Ă��܂����B
���i�W�{�^���Ίe��
�ǂ��̔����ق֍s���Ă������悤�ňႤ�W�������Ă���A�����������̍������Ă�����������
�C�����܂��B�ŋ߁u���i�S�ȁv�Ƃ����{��ǂ�ł��猩�����Ƃ܂��������[�܂�܂����B
�����̉��̐����́A�q���̍��ɐ}�ӂœǂb������ȍ~�̔����ŁA�i���̎��`�}���炵��
�����ԕς���Ă��āi�Ⴆ�����̕����z���}�ɖт�H�т������Ă�����A�J���t����������Ȃǁj
�A�����قŗ���Ă���h�L�������^���[�f��Ȃǂ܂Ŋ܂߂āA�V�����m����̂Ƃ��Ċy���߂܂����B
�z�r�[�V���[�i2018�H��������2019�t�����j
�����ʔ������m�Ȃ����ȁ`�ƁA���ɍs���Ă��܂����B
�r�b�N�T�C�g�̕��͉��̖ʐς̊��ɐl�����Ȃ��āA�V���i��������茩�鎖���o���܂����B���W�R���͌^��
�������㈵���ɂȂ�̂��A���Ɩ{�i�I��ROV�i�ŋ߂͐����h���[���Ƃ����H�j���W�����Ă���ӊO�ł����B
�C�����ꂢ�ȂƂ���ŗV��ʔ������E�E�E�Ǝv���܂������A�����̏ꍇ�A���D���瑀�삵�����Ђǂ��D��
�����邾�낤�ȁ`�Ǝv���܂����B
�É��̕��͌ߑO���ɒ����悤�ɍs���܂������A���ɓ���܂łɍs�o���Ă��āA����������l���݂�
��ςł����B���ɕ��̗̂L��Ƃ��낪�Ђǂ����ݕ��ŁA�W���i�������܂���ł����B�܂��A������͂ǂ��炩�Ƃ����ƁA
���f���[�Y�M�������[���ړI�ōs�����̂ŁA����ł͂��Ă����Ƃ������ĂЂƂ܂��ړI�͒B���܂����A���A�ƂĂ����܂����B
�������e�ŁA�r�b�N�T�C�g�ł���Ă��������̂ɂȁ`�Ǝv���܂����B
��Ɋ֘A�̔�����
�P�U���@�@���퓬��
���悾
�|��������
��s�@�̔�����
19.05.06 Intel RealSense Depth Camera D435
�Ƃ�������Ƃ��āA���W�ȂǂŃZ���T�[�w�b�h�ɕt���������g�Z���T�ȂǂŃX�L�������č�������[�_�[�`���[�g�I�ȃf�[�^��
���邩�ȁH�Ƃ������ƂŁAdepth image �̐^�ӂ���P���C���A�������t�@�C���`���Ŏ��o���āA�O���t��`������E�E�E
��������Ă݂܂����B
�f�[�^������������������������A�ǂ�����ĕ⊮����̂��ǂ��̂��ȁH�ƍl���܂����B
���̑��A��������܂Ŏg���Ă������[�_�[�`���[�g��肾���ԋ����̂ŁA���̃Z���T�[���Z���T�[�w�b�h�Ō�����ς�����
�悤�ɂ�����A�����Ⴄ�����Ń��{�b�g�Ɏ��t�����蓙���K�v���Ǝv���܂����B
�m�[�gPC�ɕt���ĐF�X�g�߂ȃV�[���𑪒肵�ėV��ł��āA����D435�̎����
�[�߂�ƁA���܂ł̋����ł͂Ȃ��A���ɉf���Ă�����̂܂ł̋������o�Ėʔ����Ǝv���܂����B
18.07.29 �I�[���E�C���E�����̃��W�R��
�����x�݂ɋA�Ȃ����Ƃ��A�Ẫg�C�E�h���[������ėV��ł݂���ӊO�Ɗy���������̂ŁA�����ł�������Ă݂悤�E�E�E
�ƁA���ׂ��Ƃ���A�������e����ł������W�R���������[�^�[�A�d�r�A�����@�A�Z���T�[�ȂǑS�̓I�ɐi������������
�ቿ�i�����i��ł��邱�Ƃ��킩��A���̊Ԃɂ���������Ă��܂����B
�ȉ��ǂ̕ӂ��ǂ��Ȃ����Ǝv�����������Ă݂܂��B
Lipo�o�b�e���[���W���ɂȂ�A�p���[�E�G�C�g���V�I���ǂ��Ȃ����B
�v���|���o�����ʐM�ɂȂ�A�d�r�ꂪ�߂Â��ƃv���|���̃u�U�[�Œm�炳���B
���ƐM�p�ł���o�b�e���[�d���Ď��@�\�����Ă���̂ŁA�s���Ȃ�Lipo���g����B
�����������Ȃ����B
�W���C���Ɖ����x�Z���T�[�i���{�b�g�ɐς�ł���̂Ɠ����悤�ȃ^�C�v�j���t���Ă��āA����������ǂ��ƂĂ����肵�Ĕ�ԁB
�������Čy���̂ŁA�����ė����Ă����Ȃ�
���Ɏʐ^�ʼn��Ɏʂ��Ă���h���[���Ƃ������A��̂Ђ�T�C�Y�̃N�A�b�h�R�v�^�[�́A�����ď�v�ŁA
���W�R���J�[���炢�̊��o�łR�����I�ɑ��삵�ėV�ׂāA�ƂĂ��y���߂܂����B�iHoly Stone�� HS150�Ƃ����@��ł��j
18.01.21 BV206S�݂�����
�O����ʔ������J���ȁ[�Ƌ����������Ă���BV206S�̗l�ɁA�L���^�s���ő���ԗ���A���������̂��y�����H��V���[�Y��
�R���|�[�l���g�őg��ł݂܂����BBV206S�͔����ق̓W���ԗ��ɏ���Ă݂����Ƃ܂ł���܂����A�X�y�[�X�����Â��ĘA��
�������ǂ��킩��Ȃ������̂ŁA�v�����œ����ʐ^�����Ȃ���F�X�����Ă݂܂����B
�������Ă����Ɍ`�ɂȂ��ē�������̂��A�Ȃ��Ȃ��y���������ł��B���Nj@�\�܂Őv�����烉�W�R���ɂ��Ă݂悤�Ǝv���܂����B
17.11.05 ���N�Y�K�j
�J�オ��A�o�C�N�ŏo������Ƃ��A�J�o�[���߂�������^�C���̉A�ɂ��܂����B���̊O�ŊȒP�ɕ߂܂�����Ƃ����
����̂��������̂͏��߂Ă������̂ŁA���r���{�b�g�̓��������̎Q�l�ɁA�ꌎ�قǎ��炵�Ă݂܂����B
�q���̍��́A�������J�j���������炵�āA�ώ@���Ă����̂Ō�����Ă������ł������A�������
�����^�ԏ��ԂƂ��A�e�߂̉��͈͂Ƃ����낢�딭���������Ċy���������ł��B
����͗\�ߌ��߂����Ԏ��炵����A�Y���̂��ߊC�����������������̂ŁA�Ŋ��̊����ɕ����Ă��܂����B
���
��n�Ղ̃|�X�^�[�ɋC���t�����̂Ō��Ă��܂����B�G���W���̉��Ɣr�C�K�X�������������ł��B�S�O�N���炢�܂��A�q���̍���
�p���[�V���x�������@�B���̑��X�������v���o���܂����B��C�̉��ƏՌ��g�H��YouTube�̓���ł͕�����Ȃ����͂ł����B
17.05.07 �Ԃ̎����u���[�L
�ŋ߁A�A�N�Z���ƃu���[�L�̓��݊ԈႦ�ɋN������l�g���̂̃j���[�X���ڗ��C�����܂��B
�X�[�p�[�̎����Ԕ̔��X�̏o�����ł�������V�^��(C-HR)�̃J�^���O�œǂ���A�����ŕ��i����ėV��ł���
���{�b�g�ŏo���鎖�Ȃǂ���̊��o�ŁA���̎���A�����𑖂邷�ׂĂ̎Ԃ́A�Ԃ���O�Ɏ����Ŏ~�܂邭�炢�͂��Ă�
�ǂ��̂ł́H�Ǝv���܂����B
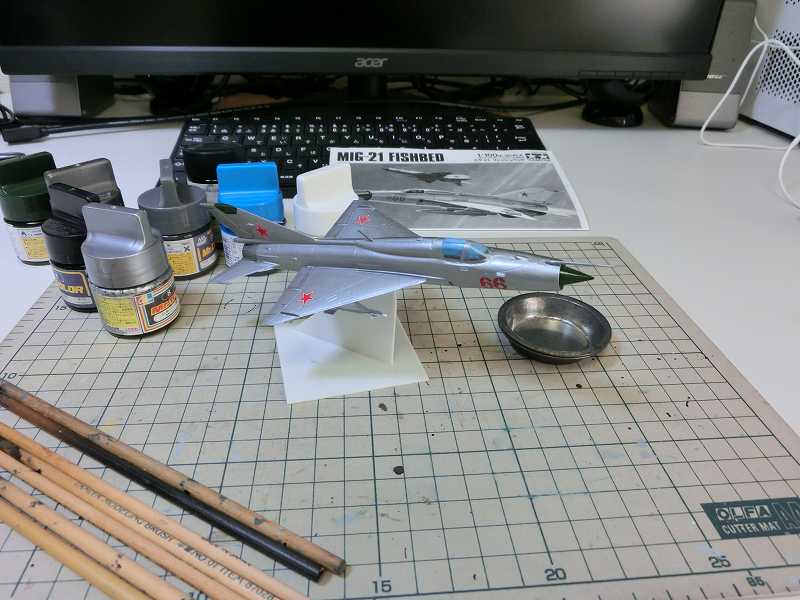
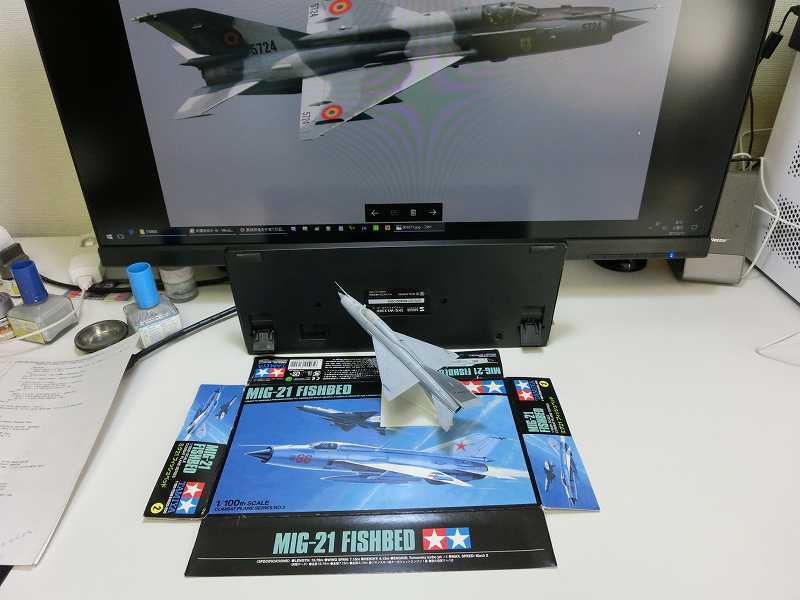
17.04.09 �v�����f��
�R���̓X�M�ԕ��ǂŁA�ϋɓI�ɊO�ɏo��ꂸ�d�q�O�Q�̃t�B�[���h�e�X�g�̑������o���Ȃ��̂ŁA�X�g�b�N�̃v�����f����g�݂܂����B
����͂��̂����̂P��1/100�X�P�[����Mig-21�ł��BYoutube�ʼn��X�ƃ\�A��R�@�̃h�L�������^���[�����Ă�����A
�Ȃ�ƂȂ��������悭�����Ă����̂ŁA�育��ȃv�����f���ƌ������Ń^�~����1/100�X�P�[���̌R�p�@�V���[�Y��
�I�т܂����B���̃L�b�g�����w���̍��Ɍ����Ƃ���100�~�`200�~���炢�������L��������܂����A500�~�ɂȂ��Ă��܂����B
�����Ɣ�ׂēd�q���i�͌��I�ɐ��\�A�b�v���Ēl�i��������܂������A���������Z�p�̐i���ɊW�Ȃ��H���i��
�l�オ�肷��̂��ȁ`�Ǝv���܂����B
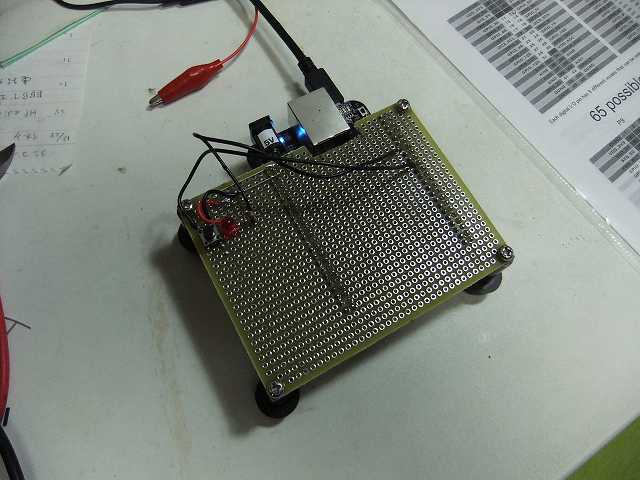
17.01.07 LPC1114���g�����H��
�v���Ԃ�ł����ALPC1114�Ɋ����Ӗ������˂āA�ȑOH8/3664�ō�������x���K�[���O���[�h�A�b�v�������̂����܂����B
��̓I�ɂ́A���x�ɉ����Ď��x�ƋC��������ł���悤�ɂ��܂����B
USB�V���A���ϊ����W���[���o�R�łQ�S���ԉ^�]��PC�ɐڑ����APC���͂̏�Ԃ�PC�ɋL�^���܂��B
���S�ɂȂ�LPC1114���͂��߁A�Z���T�[��LPC331��AM2320������d�͂��������̂ŁA
USB�V���A���ϊ����W���[���̂R�D�RV�^�T�O��A�n�̋��d�ŏ\���ł����B
�C���Z���T�[�Ƃ������̂����߂Ďg���܂����B���O�ƓV�C�}�̋C�����悭��v���A�V�C�}�̕ω�
�������̋���Ƃ���ɂǂ������ω��ƂȂ��ĕ\��Ă���̂����A������Ȃ�������������ĕ�������
�C�����܂����B
�܂�����g�����Q��̃Z���T�[�́A�T�[�~�X�^���g�p�����O��ƈႢ�A�A�i���O�̑���d�����牷�x��
�ϊ�����e�[�u���������ĕ�Ԍv�Z���铙�̎�ԂȂ��ɁAI2C�Őڑ����Ďg���ĂƂĂ��֗��Ŋy�ł����B
16.09.07 2016�N�Ă̗��s
�ďA�E��A�Α��P�O�N�̃��t���b�V���x�ɂƉċx�݂��Ȃ��ăp�b�P�[�W�c�A�[�Ŗk�����s�ɍs���Ă��܂����B
���ʂɊό��X�|�b�g������r���ŁA�`���R�`���R�����������Ԓ��x�̃t���[�^�C�����̊ԂɎB�����A��ɏ�蕨�̎ʐ^
�����Ă䂫�܂��B
���̑��A�p�b�P�[�W�c�A�[�͈ړ�����Ŗʔ����Ȃ������E�E�E�ƍs���O�͎v���Ă��܂������A��s�@���猩�����A�C�����ʂ�
���͔��d���Ԃ�����ł�����i��A��Ղ��@���������ŕǂ��ł߂�H�������Ă��Ȃ��g���l���A���͔��d���A�k�C�E�o���g�C��
�������ǂ��t�F���[�A���͏W�������̓d�ԂƂ��A�ړ��������낢�닻��������̂�����āA�ӊO�Ƃ������s�ł����B
15.10.18 �ŋߔ���������|�w�b�h���[�y
�V�N�O���炢����A�V��̏Ǐo�n�߁A�O�p�ƃf�X�N���[�N�p�Ŋዾ���Ă����̂ł����A�f�X�N���[�N�p��
�ዾ�Ŋ�̌�����Ƃ��Ă��Ă��A�n���_���t���Ă��邢����肪�t���Ă��Ȃ������E�E�E�Ƃ����̂����������̂�
�w�b�h���[�y�Ƃ������̂��Ă݂܂����B���ׂ�ƃs���L���ŁA���������Ă��Ƃ�������Ƃ�����肾�����u�s�q�t�r�b�n�@�w�b�h���[�y�v
�Ƃ����T�O�O�O�~���炢�̂��̂�I�т܂����B
15.10.12 LPC1114�̗��K
�u����邽�߂Ɏg���Ă݂�v�ړI�ŁA�q�b�T�[�{�R���g���[���[������Ă݂܂����B�J������mbed�𗘗p���A
USB-�V���A���ϊ����W���[���o�R�Ńv���O�����̏������݂ƁA�q�b�T�[�{�̈ʒu���w�肵���肷��ʐM���s���܂��B
2L5v1�p�ɐ��쒆�̎�́A�V���A���ʐM�̃T�[�{�ł͂Ȃ��̂ŁA���̃R���g���[���[��I2C�X���[�u�Ƃ��ċ���ŁA
������̂Ɏg�������A�ƍl���Ă��܂��BH8/3664���g���č�����R���g���[���[�����A�ޗ��������
�����\�ŁA�ǂ��Ȃ����ȁ[�Ǝv���܂����B
15.08.16 �X�V�����o�b�̒��q�ƁAWindows�̃o�[�W�����A�b�v
�P���Ƀ������[���������Ĉȍ~�u�������[�G���[�v���o�Ď~�܂邱�Ƃ͂Ȃ��Ȃ�܂������A�P�J���ɉ���
���x�̕p�x�ŃX���[�v���畜�A���Ȃ�������A�ċN��������������A�ƌ������������܂����BWindows�̃��O�������
�A�����̕s��̎����ɁA�b�h���C�u�ŃG���[���o�Ă��܂����B
���g�c�c����̃f�[�^�R�s�[�̎��ɁA�G���[���b�Z�[�W�����g�c�c���w���悤�ɕς��A�X���[�v���A���s����
���܂����̂ŁA�ǂ���璼�����悤�ł��B����̃}�E�X�R���s���[�^�̂o�b�̓n�Y���ł����B���ߑ��ł��B
Windows10�̕��́AWindows8.1�Ƒ��쐫�ɑ卷�Ȃ��A2L5�Ƃ̒ʐM���^�C�~���O�̖��ł��܂��o���Ȃ��Ȃ������́A���Ȃ��g���܂����B
�O�̂n�r�Ƃ��܂�ς��Ȃ��̂ŁA����܂ł�Windows�̖��O�̕t�����̗����Windows8.1 SP2�Ƃ��ł��ǂ������̂ł́H
���Ǝv���܂����B
15.03.29 ���{�b�g�A�[��
�e���̒����ʒu�A���͈́A�o�v�l�p���X���Ǝ��ۂ̊p�x�̑Ή��ȂǁA�߃p�����[�^�t�@�C����
���������ʂƁA���[�V�����v���O���������߁����s�����ʂȂǁA�ЂƂƂ���v���O���������A
��������悤�ɂȂ�܂����B
���̃��[�r�[�͓����Ă���l�q�ł��B
VIDEO
�Ȃ�ƂȂ��A�Y�ƃ��{�b�g���ۂ��I�����W�ɓh�����܂����B�U�����Ђǂ��ł����A�d�g�݂̐����p�Ȃ̂ŁA�ǂ��Ƃ��܂��B
���ۂɓ����u�~�j���Y���C���v�݂����ȕ�������Ă��ʔ��������Ǝv���܂����B
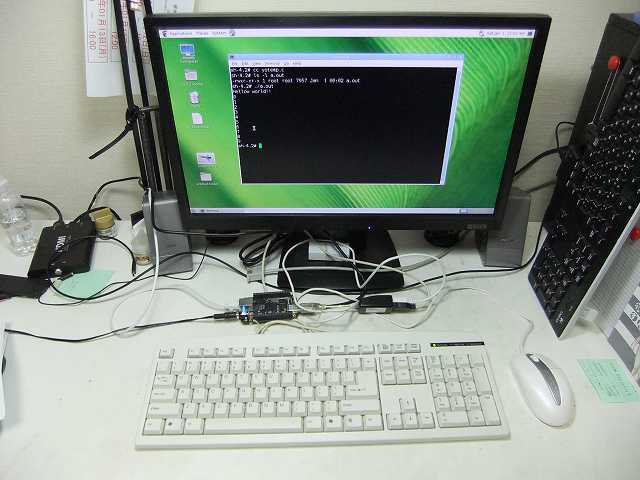
LPC810M021FN8��LPC1114FN28�̗��K
�����Ƃ��H���d�q�ɂ�100�~�O��Ŕ�����Cortex-M0�̃}�C�R���ł��B���܂܂�H8/3664���g���Ă���
�p�r�Ɏg�������Ȋ����Ȃ̂ŁA�w�����Ambed�łk�`�J���Ă݂܂����B�v�����Ō��J����Ă�����
���Q�l�ɂ���Ă݂܂������A��������ƃv���O�����������݂��瓮��m�F�܂ōs���܂����B���������ł��B
15.02.15 ���{�b�g�A�[��
����ƐE��Ƀ��{�b�g�A�[����g�ݍ��������ݔ��������Ă��܂����B�����Ă���̂�����Ƃ��������ʔ����̂�
�����͌^������ėV��ł݂悤�A�ꍇ�ɂ���Ă͋���p�Ɏg���Ă݂悤���E�E�E�ȂǂƎv���A�ȑO��������{�b�g�̃��T�C�N�����i�ƁA
����̎g�������l���Ă��Ȃ��A�Â����i��ޗ����g���č��͂��߂܂����B
�����̎��_�ł͎��R�x�T�ŁA�q�b�T�[�{�͂Q�k�Q����A�}�C�R���Ɠd�����j�b�g�A�d�r�͂t�m�h����̕����g���܂����B�\�t�g�E�F�A��
�R���|�[�l���g�͂t�m�h�ƂQ�k�T���痬�p���Ă��܂��B
�܂��r���ł����A����������Ă���u�m�b�H��@�B�̃v���O�����v�̗v�̂œ������v���O�����ł���悤�ɂ�������Ői�߂Ă��܂����A
�g�߂ɂ���Y�ƃ��{�b�g�̃��{�b�g����Ɏ������v���O�����œ����悤�ɂ��Ă��ʔ������ȁA�Ƃ��v���Ă��܂��B
15.01.12 �Q�k�Q�̃��T�C�N��
�����ɕ��������Ă��āA�V����������蔃�����肵�����̂�u���X�y�[�X�������Ȃ��Ă����̂ŁA�N���̑�|����
��Ƃ��āA���T�C�N�����܂����B���͂��̓r���̎ʐ^�̈ꕔ�ł��B�Q�k�Q������Ă��������f�W�J���̐��\�������ԗǂ��Ȃ��Ă���
�̂ŁA��ʂ�L�^�̎ʐ^���c���Ă����܂����B
�����������i�������āu��Ȃ���悭������ȁ[�v�Ǝv���܂����B�P�O�N���炢�����āA�Q�k�P�ƂQ�k�Q�͑�̓����E�E�E�Ƃ���
�L���ɂȂ��Ă����̂ł����A��Ƃ��Ȃ���ǂ��������ǂ����Ȃ���A�ŏI�I�ɂX�O�����炢��蒼�����L�����h���Ă��܂����B
�X�V�����o�b�̒��q
�����g���Ă���Fire Fox���悭�~�܂�̂́AFireFox�̖�肩�Ǝv���Ă��̂܂g���Ă��܂������A�O���t�B�b�N�R���g���[���[
�Ƀ��Z�b�g������������A���o�b����R�s�[�����t�@�C���̒��ɉ��Ă���̂���������Ɓu���Ȋ����v�������Ă��Ă�����ɁA
�������[�G���[�Ńu���[�X�N���[�����o�܂����B
�u�́`�A�s�Ǖi���`�v�ƒE�͂����̂��A�C����蒼���Ă��낢��`�F�b�N�v���O�����Ń`�F�b�N���A�Ƃ肠�����Ƃ������ƂŁA
DIMM�������[�̍����������ʒu����ւ����s�����Ƃ���A���̌�͋C�Â��悤�Ȉُ�Ȃ��g���Ă��܂��B���܂����B
PC��ʂƂ��āA���낻��u����������S���Ċm���Ɏg���鐻�i�v�ɂȂ��Ă���Ȃ����̂��ȁ`�Ǝv���܂����B
14.12.14 �o�b�̍X�V
����܂ł́A���������T�N�����āA�O�����Ƃ��Ɠ����x�i�P�O���~�����j�łT�`�P�O�{���x���\��
�ǂ��Ȃ����������v����čX�V���Ă��܂����B�O��w������V�N�������̂ł����A�����܂Ő��\��
�オ��l�q���AWindows10��Windows7���傫���ς��l�q���Ȃ��̂ŁA������Ƃ�������ł���
�u�̏Ⴕ�Ďg���Ȃ��Ȃ�O�ɁE�E�E�v�Ǝv���A�V�����o�b���܂����B
���܂ł̂o�b���̏Ⴕ�Ȃ��������ƂƁA�R�X�g�p�t�H�[�}���X�ɖ������Ă���̂ŁA���n���̃}�E�X�R���s���[�^�@LM-iH301S�Ƃ���
�~�j�^���[�̃f�X�N�g�b�v�o�b���܂����B��ւ��ĂQ�T�Ԃقǂ����܂����A�����s�ǂ����������ŗǂ������ł��B
�v�����u���E�W���O������A�g�o�̍X�V��Ƃ�������̑��슴�o�Ƃ��ẮA����قǁu�����Ȃ����v�Ƃ��������͂��܂��A
�R���p�C���̎��Ԃ�h�c�d�̃��X�|���X�͂����ԗǂ��Ȃ�܂����B�b�o�t�̃R�A���ƁA�������ʂ��{�ɂȂ������ʂ��o�Ă���悤�ł����B
���Ȃ݂Ɏ�ȃX�y�b�N�͈ȉ��̒ʂ�ł��B
CPU : Core i5-4690@3.5GHz
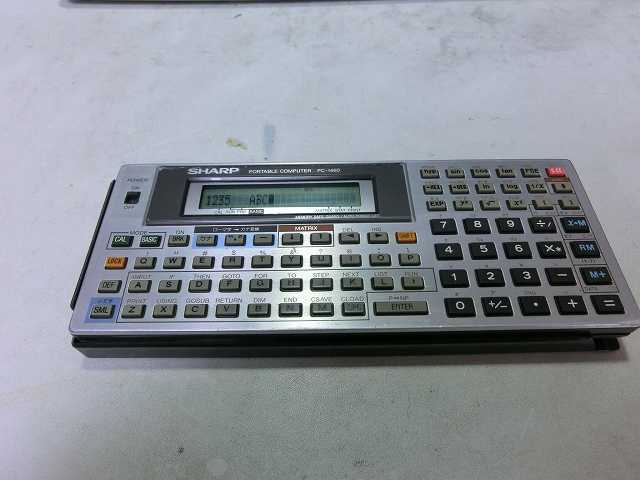
14.04.27 �|�P�R���i�V���[�vPC-1460�j�̑|��
�������N�A�ǂ����L�[���Ђ��������āA�������낵�����̂ŁA���͊��d����������ABASIC�Ŏg�����Ƃ��߂����ɂȂ��̂Ŏ̂ĂĂ��܂������E�E�E
�Ǝv���܂������A�g���Ȃ�Ă��āA�Ȃ�ƂȂ��̂ē�̂ŁA���߂ĕ���|�������܂����B
Wiki�Œ��ׂ���1985�N���Ƃ̂��ƁB���p�x�Ŏg���킯�ł͂Ȃ��ł����A�ʂɎ����Ă���E-200, PC-1360���ɒ�����������̂ł��ˁB
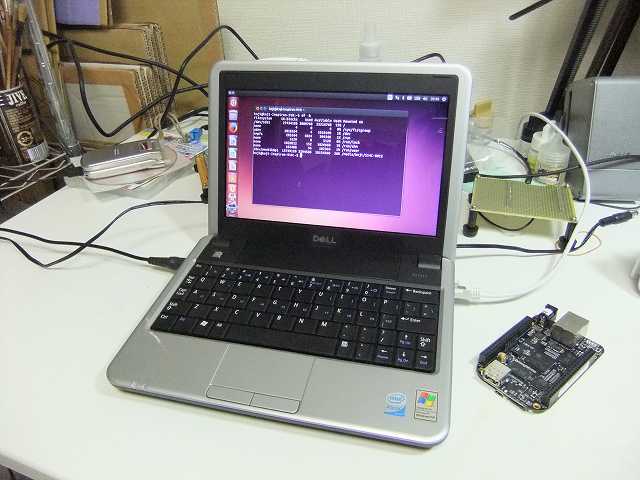
14.02.02 Beagle Bone Black��OpenCV������
FAT�G���A���o�R���āA�o�b����t�@�C�����R�s�[���Ă������AM*��Makefile�ƈꏏ�ɁAMLO������Ĉړ����Ă��܂����������A�C���t���Č��̏ꏊ�֖߂������
�N�����Ȃ��Ȃ���
���܂����̂ŁA�����t���b�V����Angstrom linux���X�V�C���X�g�[�����܂����B�C���[�W�̃C���X�g�[���ƁA���̌��
update, upgrade�Ŕ������炢������܂����BFAT�G���A�o�R�̃t�@�C���ړ��ł������̂ŁAsamba�Ńz�[���f�B���N�g��
�����L���A�t�@�C���̈ړ����o����悤�ɂ܂����B
���̌�AAngstrom�Ɋ܂܂�Ă���openCV���g���āAUSB�J���������荞�摜���f�X�N�g�b�v�ɕ\������v���O������
����Ă݂܂����B���ɖ�薳���R���p�C��������s�܂ōs�����̂ŁA�g���������Ǝv���܂����B�g�����J������
Raspberry Pi��OpenCV�����������Ɠ����A�A�[�X�E���[�o�[�p��Web�J�����i���W�N�[���̂b�T�O�O�j���g���܂����B
�摜��荞�݂�����Ă݂āARaspberry Pi��萔�{���x�������ȁH�Ɗ����܂����B
I2C�C���^�[�t�F�C�X�̃Z���T�Ȃǂ�����
�H���Œʔ̂����Ƃ��ɁA�Ȃ�ƂȂ��u���A�V�����̏o�Ă�v�݂����Ȋ����ł��łɒ��������W���C���Z���T�[L3GD20�A
���x�E�C���Z���T�[LPS331AP�A���x�Z���T�[ADT7410���A�u���b�h�{�[�h��mbedLPC1768�Ɣz�u���Ď����Ă݂܂����B
14.01.27 Raspberry Pi�ŃV���A���ʐM������
���{�b�g�̃��C���b�o�t�ɐ����鎖���l���āARaspberry Pi�̃V���A���|�[�g�Ɋ���邽�߂��낢�뎎���Ă݂܂����B
�g���₷�����d���e�ʃA�b�v�̂��߁ABeaglebone Black���Ɏg���Ă���5V2.3A�o�͂̃X�C�b�`���O�`�^�b�A�_�v�^�[���Ȃ����߂̃W���b�N��
�h�[�^�[�{�[�h�ɕt���܂����B�s���w�b�_�̂T�u�s�����狋�d���܂��B
Raspberry Pi��OpenCV������
Interface 2014�N�P�����̋L���ɉ�����OpenCV���C���X�g�[�����A��F���T���v���v���O������
�R���p�C�����o���鎖�̊m�F�ƁA���s���ʂ����Ă݂܂����B�J�����̓A�[�X�E���[�o�[�p��Web�J�����i���W�N�[���̂b�T�O�O�j���g���܂����B
�u���[�A����ȏ������ď���d�͂̏������R���s���[�^�œ������[�v�Ƃ��������͂���܂������A�̊��I�ɃA�[�X�E���[�o�[�p��
�Â��l�b�g�u�b�N(Dell mini9)�̂T�`�P�O�{���炢�������Ԃ������銴���ŁA�x���ȁ[�Ǝv���܂����B
14.01.19 Raspberry Pi�p�h�[�^�[�{�[�h����
�^�N�g�X�C�b�`�F �V���b�g�_�E���{�^���Ƃ��ė��p
�k�d�c�F �ȒP�ȏ�ԃ��j�^�p
���Q���ڑ��̃L�����N�^�k�b�c�F �h�o�A�h���X����ԕ\���p�i�k�`�m�ɐڑ������Ƃ��́A��������Ă������ڑ�����A�h���X��m��j
USB-�V���A���ϊ����W���[���F �V���A���R���\�[���ڑ��p�i�k�`�m�ɐڑ����Ȃ����ɗ��p�j
�^�N�g�X�C�b�`��LED��Beagle Bone Black�̎��Ɠ����悤�ɃV�F���œ���m�F���܂����B���̓V���b�g�_�E���{�^���Ƃ��ċ@�\����
�p�A�����N�������V�F���Ń|�[�����O���A���������ꂽ��shutdown -h now�������悤�ɐݒ肷��\��ł��B
�k�b�c�͋N�����ɂh�o�A�h���X��\������悤�V�F�����쐬���A�Z�b�g���܂����B�V�F����ݒ�ɂ������ẮA�ȉ��̃T�C�g��
�Q�l�ɂȂ�܂����B
���̑��A�o�b�Ƃ̃t�@�C�������p��samba���C���X�g�[�����܂����B
14.01.13 ARM Linux �}�C�R���ȂǁA�����x�݂̊���
���N�̂P�O���ȍ~�A�l�b�g��{�ł��낢�뒲�ׂāA���X�����āE�E�E�Ƃ��������Ői�߂Ă��܂��B
���̔��N�قǃ��W�R���J�[�ł悭�V��ł��܂��B�˂��l�߂Ă����ƁAGPS���{�b�g�J�[�̗l�ȑ��c���Ȃ��Ԃ̕���
�T�[�L�b�g�𑖂��Ă��ǂ��^�C�����o�邾�낤�Ǝv���Ă��܂����A�A�[�X���[�o�[�Ɋւ��ẮA�m�[�gPC���ڂ���
�����Ԃ̃N���b�V����PC�������Ȃ��̂ŃX�s�[�h���o���C�ɂȂ�܂���ł����B�������ARaspberry Pi�Ȃ�������A
�y���ĉ��ɂ������ڕ��@���e�ՂȂ̂ŁA�X�s�[�h�d���̃v���O�����ŗV��ł��ʔ��������Ǝv���܂��B
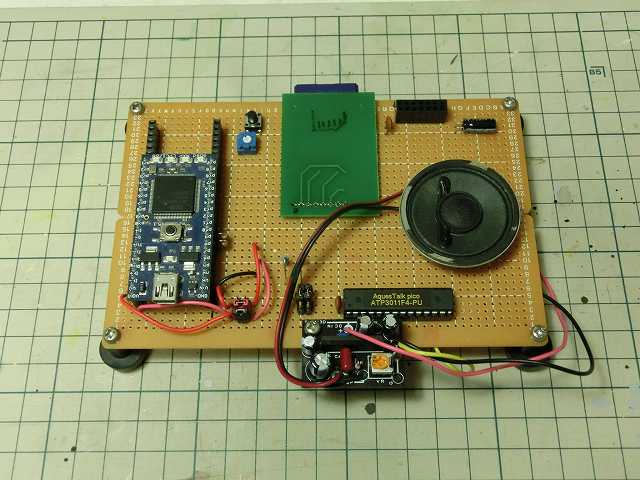
13.12.08 AquesTalk pico
AquesTalk pico���H���̃T�C�g�Ō��āA�ȒP�Ɏg�������������̂ŁA�C���������烍�{�b�g�ɉ����o��
�@�\�����Ă������ȁ`�A�Ȃǂƍl���A���̎����Ⴄ���̂��Q�����Ă݂܂����B
�Ƃ肠�����A�O��̍X�V�̎��ɍ����mbed�̃{�[�h�ɍڂ��Ă݂܂����B���̏o�͂͂v�U��wav�t�@�C����
�Đ��@�\��t���Ă݂��Ƃ��ɑg�A���v�ƃX�s�[�J�[�̃L�b�g���g���Ă݂܂����B
�ȒP�ȕ����A���낢��A�N�Z���g��ς����肵�Ȃ���o�͂��ėV��ł��܂����B�����̍�����A�e�L�X�g�̓ǂ݂����Ɋւ��ẮA
�o���߂̍��i�R�O�N���炢�O�H�j�ɉ��������Ă���̂��������Ȃ����x���̕��ɂ������肵���L�����Z���̂ŁA�����`�b�v
�}�C�R���̍ڂ����V�X�e���ŁA�P���Ɂu�����Ă��邱�Ƃ������ƕ�����v���ƂɊ������܂����B
13.10.06 mbed�̗��K���͂��߂Ďg�����i�̃e�X�g�p�{�[�h
mbed�̎g�������������@�\�̗��K��������A�͂��߂Ďg���Z���T�[���̕��i�̃e�X�g��
���邽�߂̃{�[�h���ЂƂ��܂����B�����_�ł͂���܂�g���������������Q���C���^�[�t�F�C�X��
���K�����悤�ƁA���Q���ڑ��̃L�����N�^�k�b�c��t���Ă���܂��B
Beagle Board Black A5C
�l�b�g��{���o�Ă���̂����낢��݂āA�u�Ȃ��͂���Ă���H�v�Ƃ���������
�uRaspberry Pi�v�ƁuBeagle Board�v���C�ɂȂ��Ă��܂����B���炭�i���œ��荢��̈�ۂ�
�����Ă��܂������A�H���Ŕ�����̂ɋC���t�����uBeagle Board Black�v�̕����Ă݂܂����B
13.08.18 ���W�R���J�[
�x�����s�������ŏ�蕨�W�̓�������Ă���ƁA�����������W�R���̓�����������Ă��܂��B�����
�̂�A�z�r�[�V���b�v�̃R�[�X�ő����Ă��鏊�Ȃǂ����āA���܂ɗV�т����Ȃ�̂ŁA�Q�T�N�Ԃ肭�炢
�i�f�o�r���{�b�g�J�[�p�ɔ������b�q-�O�P�������Ɓj�Ń��W�R���J�[�̃L�b�g�w�����܂����B
�l�W����߂Ă䂭�����łǂ�ǂ�g�ݗ��Ă��i�݁A�`�ɂȂ��Ă����Ƃ��낪���\�y���������ł��B
������Ƒ��点�Ă݂������A���̃N���X�̃��W�R���J�[�͂����ƃr�����r��������E�E�E�l�ȋL����
���҂��������̂ł����A����قǂł��Ȃ������ł��B�M�A�ƃM�A�P�[�X���ǂ��Ȃ����������A�P�X�W�O�N���끦
�̃L�b�g�Ɣ�ׂ�ƁA�ƂĂ��Â��ɑ���܂����B�܂��A���c�Ɋւ��Ă��Ȃ������ĂƂĂ����点�₷�������ł��B
�Ȃ�������Ȃ��C�����܂������A���点��̂�����Ԃ��ƁA���܂ɗV�Ԃ����̕s����ȏ�Ԃł�
�Ԃ���Ǝv���̂ŁA�܂�����͂���ł������E�E�E�Ǝv���܂����B
�������͓c�{�@�|���V�F�X�R�T�A�����{���M�[�j�`�[�^�[�A�J�E���^�b�N�A�����@�G���b�N�s�[�i�b�c�A�����[�X�|�[�c�A�����}���C�@�U�E�n���^�[
�ȂŗV��ł��܂����B
13.05.12 Windows�̃Q�[���p�b�h
2013.01.06�̏������݈ȍ~�A�Ƃ肠����mini9����Pen4���𑀏c�ł���悤�ȂƂ���܂ō��܂������A
��ƃX�y�[�X����������PC��2��o���Ă����Ǝז��Ȃ��ƂƁAWindows8��mini9��VB2010�g���̂͏d���̂�
�g�����肪�������ƂȂǁA�����ǂ��Ȃ��̂Ń��C���Ŏg���Ă���Windows7 64bit�ł̃f�X�N�g�b�v�o�b�ł��g����Xbox360��
�Q�[���p�b�h�AMicrosoft XNA Gamestudio4.0������VB2010�̑g�ݍ��킹�ŁA�����悤�ɑ��c�ł���悤��
���𐮂��A�v���O���������܂����B
XNA�̃C���X�g�[���[�̓C���X�g�[�������Ƃ���C#��v������̂ŁA�Ƃ肠����C#���C���X�g�[���������
XNA���C���X�g�[�����܂����B�o�����S���𑀏c����v���O�����̃Q�[���p�b�h�ɃA�N�Z�X����N���X�́A�l�b�g
�ł�����������b���̃T���v���v���O�������u�a�ɈڐA����`�ō��܂����B
13.03.03 �N���[���[���ړ����j�b�g
�ŋ߁A��Ԃ��o�Ă���A�j�������Ă��āA�܂��v�U�̏��߂̂���Ɏg���Ă����N���[���[���̈ړ����j�b�g����
�V�т����Ȃ�A�Q��ލ��n�߂܂����B
�a���Q�O�U
�Ƃ����A�ԑ̂�
�Q��A�������`�̎ԗ��̓������ʔ��������̂ŁA�ړ����j�b�g�Ƃ��Ăǂ�Ȃ��A�͌^�����W�R���ő��c���Ȃ���
�l�q�����Ă݂悤�I�Ƃ������Ƃō��n�߂܂����B
�ԑ̂́u�y�����H��v�̃p�[�c�ŊȒP�ɍ��܂����B���̃��J�̊̂ƂȂ�A�������͐}�ʂ��Ђ��Ă���Ƃ���ł��B�i�o�b�̉�ʂɉf���Ă��܂��j
13.01.14 ���[�V�����Z���T���p
mbed LPC1768 �ɍŋߍw�������A�H���̈��d�U���W���C�����W���[���ƂR�������x�Z���T�@KXP84���W���[�����Ȃ��ŁA
�l�q�����Ă݂܂����B���ꂼ��A���܂܂łQ�����s���{�b�g�Ɏg���Ă���PG03��ADXL202�̑�ւ��ɂǂ����ȁ`�Ƃ������_��
�g���Ă݂܂����B
�W���C���̕��͓��ɁA���s���̃t�B�[�h�o�b�N�ɗ��p����ɂ�����A�}�C�R���̂`�^�c�|�[�g�ɒ��t��������ԂŁA
�A���v�̑�������A�t�B���^�̒l���Ó��Ȕ͈͂ɓ����Ă���̂����邽�߁A�q�b�T�[�{���P�Ȃ��ŁA���s���̃t�B�[�h�o�b�N
�̃C���[�W�œ������Ă݂܂����B�����Ă݂��͈͂ł́A�ǂ��悤�Ȃ̂ŁA�o�����S���ɐςޕ����ōl���Ă݂悤�Ǝv���܂����B�W���C���t�B�[�h�o�b�N�e�X�g�̓���
���̑��Ambed�̃N���X���ǂ��g����PWM�p���X�̕����X���[�Y�ɕω��������邩�A�I�V���Ŕg�`�����Ȃ��炢�낢�뎎���Ă݂܂����B�q�b�T�[�{���X���[�Y�ɓ������e�X�g�̓���
KXP84���W���[����I2C�łȂ��ł݂āAmbed�ł�I2C�N���X�̎g�����̗��K�����˂āA�e���̒l��ǂ߂鎖���m�F���܂����B
13.01.06 �A�[�X���[�o�[�p�o�b(Dell mini9)�̂n�r�o�[�W�����A�b�v
���C���o�b�ƃ��{�b�g����p�v���O�����̊J�����̌݊����Ɋւ��āA���̐搔�N���x�͖�薳�������Ȃ��ƂƁA
���̂o�b�̓l�b�g�ɂȂ��Ȃ��ŁA���{�b�g����p�Ɏg���Ă���_�Ȃǂ���XP����A�b�v�O���[�h�̕K�v����
�����Ă��܂���ł������A�L�����y�[����\5,280-�̃A�b�v�O���[�h�ł�Windows 8 Pro �������Ă����̂ŁA
�D��S�ɕ�����mini9�̂n�r���A�b�v�O���[�h���Ă݂܂����BOS�̃C���X�g�[���ɂ������ẮA�f�[�^�̈ڍs��
�I�������A�����ς�ƃp�[�e�B�V���������Ȃ����Đi�߂܂����B
�C���X�g�[����ADell Battery Meter/Wireless Select Switch(R232390.EXE)�AJMicro Cardreader Driver (R192564.EXE)
�����ă`�b�v�Z�b�g�̃h���C�o(GMA950_win7_1512754.zip)�������������Ŏg����悤�ɂȂ�܂����B
�h���C�o�����킸�g���Ȃ��@�\���o����E�E�E�A�������x���Ȃ��Ă��܂�����E�E�E���ȂNJo�債�Ă��܂������A�ȑO���
�������X���[�Y�ɂȂ����悤�ȋC�����邭�炢�ŁA���̂Ƃ���A�b�v�O���[�h���ėǂ������`�Ǝv���Ă��܂��B
���{�b�g�W�Ƃ����AVisual Basic 2008,Visual C++2008,mbed�̃V���A���|�[�g�h���C�o(mbedWinSerial_16466.exe)�A
Direct X SDK(DXSDK_Feb10.exe)�����C���X�g�[�����܂������A����܂����̂Ƃ�����ɖ��͏o�Ă��܂���B
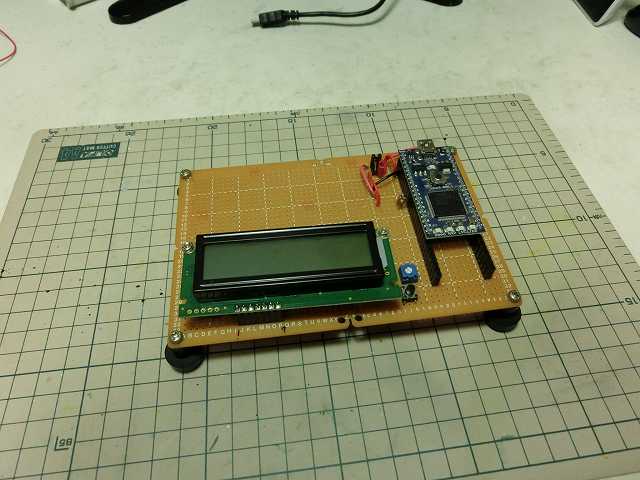
LPC1768��SD�J�[�h��舵���̗��K
mbad��Xpresso��LPC1768�ŋ��ʂɎg����t�@�C���V�X�e���Ƃ��āA���ꂩ��SD�J�[�h���g�����Ǝv���A���̎ʐ^��
�l�Ȋ�Ŏ����Ă݂܂����B
�\�t�g��http://mbed.org/cookbook/SD-Card-File-System�̃y�[�W��printf�̂݃R�����g�A�E�g���Ă��̂܂g���A���삵�܂����B
Windows�̃Q�[���p�b�h
�Ȃ�ƂȂ��A���{�b�g�𑀏c���ėV�т����Ȃ��Ă����̂ŁA�l�b�g�ŐF�X�ȃ��{�b�g�̑��c�Ɏg���Ă��鏊����������Windows�p��
�Q�[���p�b�h���w�����AVisual Basic 2008�{Direct input�œǂݎ����K�����Ă݂܂����B
���́A�͂��߂�Direct X SDK���C���X�g�[�����Ďg���Ă݂��̂ł����A64bit�ł�Windows�ŏ�L�J�����̑g�ݍ��킹��
�g���Ȃ�����m�炸����������܂����B�i�����^�C���G���[�ɂȂ�܂����B�j
32bit Windows�Ȃ�Ύg����Ƃ̂��Ƃ�m��Amini9��Windows8 Pro 32bit�Ŋ��œ����v���O�����������Ƃ���A
���܂������܂����B64bit���̌��͋C���ɒ��ׂ悤�Ǝv���܂����B
12.12.02 �����R���g���[���[�̂��̌�̗l�q���Ɖ���
12.11.05 �������J���̎ʐ^���낢��i��ɏ�蕨�j
���N�̉Ĉȍ~�ɏo�������Ƃ��ɎB�����ʐ^�ł��B
12.10.08 �����R���g���[���[�̉�H�}
�Y��Ȃ������ɁE�E�E�Ǝv���A��H�}�𐴏������̂Ō��J���܂��B
��H�}�̕\��
�d�l�Ɋւ��ẮA�ǂ������̂��g����̂��A�����ԍl���č�������ł����A��H�}�������Ă݂��
�Ƃ��Ă��V���v���ȓd�q�H��ł����B
����Ƃ��������֗������A���̂��ȒP�Ȃ̂Łu�����₱�������J�e�S���[�̏��i�������Ă���̂ł́H�v
�u�����┃�������������ƈ��������H�v�Ǝv���l�b�g�Ō������Ă݂�Ƃ��낢�날��悤�ł����B�����A
�����������g�����R�Ńv���O�����\�A�Ƃ��������̂͐����~���x����悤�������̂ŁA�u��肽������A
���̂��y�������������v�킯�ł͂���܂����A�����������悤�ȋC�����܂����B
12.09.23 �����R���g���[���[�̃e�X�g�^�p
���̌�A�܂��Q�T�Ԏg���Ă݂܂����B���x�͐��𑫂��@�\�������������܂����B�ȉ��͋C���A����
�̑���L�^���O���t�����Ă݂����̂ł��B���낻��������Ȃ��Ă��āA���Ԃɐ����̐������オ�肷����
�S�z�������Ȃ��Ă����̂ŁA�P����p�e�`�m�̓d������āA���ۂǂ̒��x�̌��ʂ��o�Ă���̂��H
��p�e�`�m���g��Ȃ��ꍇ�A�ǂ̂��炢�̎��ԂŁA�������C���ɒǂ����Ă䂭�̂����Ă݂܂����B
���Ԃ̋C�����R�T�x���x�܂łȂ�A��Ԃ̍ݎ����̓G�A�R���������ĕ�������������Ă��邽�ߐ������\���Ⴍ
�Ȃ��Ă���̂ŁA���ԂɁA��������ł��܂��悤�ȉ��x�܂Ő������オ�邱�Ƃ͖��������ł����B
����A�ċx�݂̋A�Ȏ��ȂǂQ�S���Ԉȏ㕔������Ƃ��́A��p�e�`�m�������Ǝ����Ɠ������x�i�R�T�x�ȏ�j�܂�
�������オ���Ă��܂��̂ŁA�K�v���ƕ�����܂����B
12.09.09 �����R���g���[���[�̃e�X�g�ƒ���
�����悤�ɂȂ����̂ŁA�Q�T�Ԃقǎg���Ă݂āA�\�t�g�̃p�����[�^�����ƃ��J�̉��ǂ����܂����B
���𑫂��|���v�̓���g���K�Ƃ��āA�t���[�g�X�C�b�`���j�b�g���g���Ă��܂����A���j�b�g�𐅂ɓ����
�����ɂ͖��͂���܂���ł������A�������o�ƁA�t���[�g���A�t���[�g�K�C�h�Ƃ��ĕt���������A�N������
�p�C�v�ɌŒ����Ă��܂��A�����̐��ʂ��A�����ݒ肵���������Ⴍ�Ȃ��Ă������܂���ł����B
�����ŁA�t���[�g�Ƃƃ}�C�N���X�C�b�`���Ȃ��A�[���̍\�����r���ɂ���߂���߁A�A�N�����p�C�v
�̃K�C�h�i���T�J�i�����j�������Ă������悤�ɂ��܂����B
�����ł܂�����Ƃ�A�ȈՃ��[�p�X�t�B���^�̈Ӑ}�Ń}�C�N���X�C�b�`���Q�x�ǂ݂��鎞�Ԃ��O�D�T�b����
�Q�b�ɉ�������ƂƂ��ɁA�t���[�g���Œ����Ȃ��悤�A�t���[�g�ɐG��Ȃ������ŃK�C�h���������܂����B
���̑��p�����[�^���_�Ƃ��ẮA����Ƃk�d�c�\���̑Ή��t����A���𑫂��Ƃ��ɓ������|���v��
�^�]���Ԃ��P�Q�O�b����R�O�b�ɒZ���������Ȃǂł��B
���ۂɓ������O�́A�y�b�g�{�g���̂Q�k�̐������ׂă|���v�̓��͂Ő����Ɉڂ��\�z�ł������A���ێg���n�߂�
��Ԃł́A�y�b�g�{�g�����t���h�~�̂��ߐ������������ʒu�ɒu�����̂ŁA�Ăѐ��������|���v�ő���A
���Ƃ͏d�͂ŗ����邽�߁A�y�b�g�{�g���ɖ��^���ɐ������Ă��Ȃ��ꍇ���܂߂ČĂѐ�������̂ɏ\����
���Ԃ̂R�O�b�ɂ��܂����B
�ꉞ�A�y�b�g�{�g���ƃ|���v�𐅑����Ⴂ�ʒu�ɂ����C�A�E�g�ł���悤�Ɋӏ܋��p�i�Ƃ��Ĕ����Ă���t�~�ق������܂������A
����͕K�v����܂���ł����B
12.08.26 �����R���g���[���[�imbed LPC1768 LAN I/F�̗��K�j
�W���̉ċx�݂̊��ԂłƂ肠�����g����Ƃ���܂ō��܂����B���������@�\�͈ȉ��̒ʂ�ł��B
LAN I/F�𗘗p���āA�l�b�g�̎��v�Ń��A���^�C���N���b�N�̎������킹���s���@�\�B
�i����������L�^���邽�߂̃��A���^�C���N���b�N�i�k�o�b�P�V�U�W�������v�𗘗p�B�j
�T�[�~�X�^�Q���g���A�����̋C���Ɛ����̐����𑪒肷��@�\
���茋�ʂ͂b�r�u�t�@�C���`���ŁA�o�b�ɂt�r�a�ڑ������Ƃ��ɊO���X�g���[�W�Ƃ��Č�������̃t���b�V���������[�ɋL�^����@�\
�t���[�g�ƃ}�C�N���X�C�b�`��g�ݍ��킹�ăv���H��ō�����t���[�g�X�C�b�`�ɂ��A�������ʂ��Ď�����@�\
���ʂ����̏����ɂ���背�x���������y�b�g�{�g���ɗp�ӂ������Q�k�𑫂��@�\�B
�C���^���������̏�����������A��p�p�̂e�`�m�i�P�O�O�u�@�`�b�쓮�j���n�m�^�n�e�e����@�\
�r�r�q�̓��͂̓f�[�^�V�[�g�ł͂S�`�Q�S�u�ł����A�k�o�b�P�V�U�W�̏o�́i�R�D�R�u�j�ł��X�C�b�`�o���܂����B
���肵�ē����̂��s��������̂ŁA���炭�l�q�����悤�Ǝv���Ă��܂��B
12.06.24 �����R���g���[���[�imbed LPC1768 LAN I/F�̗��K�j
�����̃X�e�[�^�X�Ƃ������A�s�݂̊Ԃ̉��x�ω����O�Ȃǂ��ǂ�����Č��悤���E�E�E�������܂����B
�͂��߂͊��ꂽ�t�r�a�|�V���A���ʐM�ŁA�������[�̓��e���^�[�~�i���ɑ����Č��悤���Ǝv���܂������A
����ł͐i���������̂ŁAmbed LPC1768 LAN I/F�̗��K�����˂āALPC1768��Web�T�[�o�[�����āA
LAN�o�R�ŁA�o�b����v�����u���E�U�Ō�����悤�ɂ��悤�A�Ƃ������ƂŊ���������܂����B
�ȉ��̂v�����y�[�W���Q�l�ɂ����Ă��������A�P���Ԃقǂ̍�ƂŁuHello World�v�y�[�W�̕\���܂ōs���܂����B
http://mbed.org/users/nxpfan/notebook/lets_try_twitter_jp/�i������̃y�[�W���Q�l�ɔz�����܂����B�j
http://mbed.org/users/yueee_yt/notebook/use_ethernet/
12.06.17 ��Q�K���ĉ�
LPC1768����Q�K���ĂŌŒ�ł���悤�ɁA�v���ŃA�_�v�^�[�����A���ʃe�[�v�ŌŒ肵�܂����B
�M�ы������@�֘A�H��
���N�̉ẮA�A�Ȓ��ɐ����̉��x���オ�肷���āA�������ɂ����ɂȂ�܂����B�����ō��N��
�C���M�𗘗p���Đ�����������t�@���ƁA�������Č��������̐��𑫂����u�Ƃ������A���炭��
����낤�Ǝv�������܂����B
�t�@���̕��́A�A�[�X���[�o�[�p�ɔ����Ďg���Ă��Ȃ��A�o�b�p�̂e�`�m�𗘗p���č�낤����
�v�����̂ł����A�����i������̂ʼnƓd�p�̃^�C�}�[�ƃZ�b�g�Ŕ����Ă��܂��܂����B
���𑫂����J�͎��삵�悤�ƁA�\�����������܂����B�H�삪�ȒP�ŁA���R�ꂪ�����A���{�b�g��
�ς�ł��鐧���H�^���[�^�[�쓮��H�ʼn^�]�ł���悤�ɍl���Ď��삵�Ă݂܂����B
�����ɓ������Ă݂��Ƃ��댋�ʂ͏�X��500ml�̐����T�O�b�قǂŔr�o�ł��܂����B
���̓v���H��ŁA�g�C���̃^���N���܂˂��t���[�g�X�C�b�`���j�b�g������Ă݂悤�ƍl���Ă��܂��B
�����̓v�����g�v�݂����Ȏd�������Ă����������������v���o���A�y�����H�삵�܂����B
12.06.03 �o�����S�̑|��������m�F
Real Steel�̂c�u�c��������A�Ȃ����{�b�g���������Ȃ��Ă����̂ŁAPen4����������o���āA
�����A�x�^�x�^�ɂȂ����r�j�[���e�[�v���͂����ăx���W���Ő@���ȂǁA�|�������A�}�C�R�����͂�
�z����A����\�t�g�̍ŏI��ԂȂǂ��m�F���܂����B
�{�̍��Ȃ̂ŁA�T�|�[�g�I���܂ŋL�����痣���������T���Ă��܂������A�������Ȃ����낤�Ǝv���A�}�C�R����
�������āA���_��ɓ�������悤�ɂ��悤���E�E�E�ƍl���Ă��܂��B
�}�C�R���͂k�o�b�P�V�U�W�ɂ��悤���ȁ`�Ƃ������ƂŁA�}�C�R���{�[�h���o���āA�������_�̃��C���o�b�ŁA
���܂����Ȃ�LPCXpresso���g�����ԂɂȂ��Ă��邩�A�k�d�c�_�ł̃v���O��������������œ������Ă݂܂����B
���ɖ��Ȃ������̂ŁA���{�b�g�ɐςݍ��݂₷���悤�ALPCLink�����x�藣���Ă���Q�K���Ă̌`��
���邱�Ƃɂ��܂����B
��q�͂̈�ʌ��J
12.05.13 �Q�O�P�Q�S�[���f���E�B�[�N�A�����ɏ�蕨�̎ʐ^
�P�^�P�K���_���������@�_�C�o�V�e�B�[�O
�����u�ӊO�Ə������ȁ[�v�Ɗ����܂����B�����Ɓu���������ȃ��J�v�Ɍ����邩�Ɗ��҂��Ă��܂������A�傫�ȃv�����f���Ƃ�����������
�A�[�ɂŌ����������̂e�|�P�T�i�K���_�����傫���j�݂����Ȕ��͂������̂��c�O�ł����B
�ł��u�傫�ȃv�����f���v�Ƃ��ẮA�ƂĂ��������������āA�������ǂ������ł��B
���ɍ�鎞�́A�W�F�b�g���˂Ŕ�肵�Ȃ��Ă������̂ŁA���߂ĕ������炢�̃M�~�b�N�����҂������I�v���܂����B
�u�K���_���t�����g�v�̕��́A�P�P�F�R�O�ɓ����J�E���^�[�ɍs���Ă݂��Ƃ���A�P�R�F�O�O�ȍ~��
�����������Ȃ������̂ŁA�܂����x�ɂ��܂����B
�g�q�o�|�P�������@�Y�����ՊC���s�S�Z���^�[�̓����z�[��
�ȑO�e���r�̃j���[�X�H�Ō��āA�u�ᑬ�̖��l�@�ɁA�Ȃ��W�F�b�g�G���W����g�ݍ��킹��̂��ȁH�ӂ���
���V�v���G���W���ƒᑬ�łȂ�ׂ����a���傫���v���y���̑g�ݍ��킹�̕����A�R��̖ʂŗL���ł́H�v��
�s�v�c�Ɏv���Ă��܂������A�v���y������]���Ƃ��Ċ�Ȃ��̂ŃW�F�b�g�G���W����I�Ƃ������Ƃ����R�̈�Ƃ���
�p�l���ɏ����Ă���܂����A�����Ƃ��ẮA�W�F�b�g���˂��\����Ȃ��Ǝv���܂����A���̑��p�l����
���e���܂߂ċ����[���W�����Ǝv���܂����B�ȉ��Ƀv���W�F�N�g�̂g�o�̂t�q�k�������Ă����܂��B
�X�[�p�[�J�[�i�̃f�R�ԁj���g���W���[�t�F�X�^�����L���V
���ŁA�ׂ������̖_��n�����Ȃ���ϑw���Ă䂭�^�C�v�̂R�c�v�����^�E�L�b�g�̎���
���ڂɂƂ܂�܂����B����Ȃ�A���o���^�C�v�̗l�ȑ����������āA���{�b�g�̊O�����ɂ��ǂ������E�E�E
�Ǝv���܂����B
���m���[��
�a�����������V�W�V
��ݏ����[�v�E�F�[
���[�v�E�F�[�̃S���h���́A���[�v�ɌŒ肳��Ă�����̂Ǝv���Ă��܂������A�����̃��[�v�E�F�[�́A
������ň�U���[�v���痣��Ď~�߂鎖���o���A���[�v�͏�ɓ����Ă���^�C�v�ł����B�S���h���̊Ԋu��
�ςɏo����Ƃ��낪�ʔ��������ł��B�ꎞ�����������@�B�̐v������Ă����̂ŁA�@�\�Ƃ��A�ێ��ԂƂ��A
����Ղ̃��C�A�E�g�Ƃ��A�����[�����Ă��܂��܂����B
����
12.02.19 �o�C�N�w��
�Q�O�O�W�N�Ƀ��}�n�x�a�q�P�Q�T�Ƃ����V���v���ȑ���̐��E�헪�ԁi�������Y�̒������o�[�W�����j
���āA������ƁA���܂Ƀc�[�����O�ŏ���Ă��܂����A�����Ɗy�ɏ���̂��ق����I�Ƃ������ƂŁA�傫�߂̃X�N�[�^�[
�������܂����B���Y�Ԃ́u��ނ����Ȃ��āA����Ȃ������������ς����Ă��č����v�Ƃ�����ۂ��������̂ŁA�����A��p�A
�C�^���A���ӂ�̃X�N�[�^�[�ɂ��悤�Ƃ��낢��l�b�g�Ō��Ă��܂������A���Njߏ��̃o�C�N���Ō������݂āA�t�H���c�@�Ƃ���
�z���_�̌��s�Ԏ���Ă��܂��܂����B
����ŁA�������T�Ԃ��́A�w���̎葱�������āA������璲�q�����āA�I�v�V�����p�[�c��ʔ̂Ŕ����Ď����ŕt���āE�E�E
�Ƃ����������ŗV��ł��܂����B�V�[�g�̉��Ɏv�����قljו�������Ȃ��_�ȊO�́A���₷���⓮�͐��\�ȂǁA�S�̓I�ɂ͎v�������ǂ������ł��B
�ł��A�L�[���X�Ƃ��A�R��v�Ƃ��A�^�R���[�^�[�Ƃ��A�T������ϑ����[�h�Ƃ��E�E�E�́u�����[�v�Ǝv���܂����B
�������A�����ł��������������킭�̂ŃT�[�r�X�}�j���A���������܂����B�T�[�r�X�}�j���A�������O��
���ɔ���t���邽�߁A�J�E�����ꕔ�O���Č�������ƂȂǂ����āA�Ȃ��i�̑����X�N�[�^�[���ȁ[
�Ɗ����Ă��܂������A�͂����T�[�r�X�}�j���A���́A�O�ɏ���Ă����I�t���[�h�o�C�N�̂R�{���炢�̌����ł����B
�T�[�r�X�}�j���A������ʂ茩�āu�����ł����Ƃ���́A����܂�Ȃ��ȁ[�v�Ǝv���܂����B
12.01.04 �k�o�b�w�������������̗��K
�N���N�n�̘A�x�ŗ��������Ď��g�߂�Ƃ������ƂŁA�茳�ɂ���������ǁA�U���Ɉ�x�����������肾����
�k�o�b�w�������������P�V�U�W�̗��K�����܂����B�U���͂��������ŃR���p�C���������W���[������������
�����������̂ŁA���x�͂����Ƃk�o�b�w�������������̃T���v���v���W�F�N�g��W�J���A�������������Ă݂���
���Ȃ�����K���܂����B
�k�d�c�̓_�ł�R���\�[���ւ̃��b�Z�[�W�o�́A�f�o�O�g���[�X�ȂLj�ʂ肤�܂������܂����A���A
�Q���ԂقǗV��A���������I�������Ƃ���A�o�b�N�O���E���h�Ƀv���Z�X���c��A�^�X�N�}�l�[�W���[��
�m�F�����Ƃ���ł́A�Q�̂b�o�t�R�A���ɂP�O�O���g���悤�Ȗ\����ԂɂȂ��Ă��܂����̂ŁA�����I�����܂����B
���̌�A���������N�����悤�Ƃ����Ƃ���A�t�@�C���̕s�����H�ŋN�����Ȃ��Ȃ��Ă��܂��܂����B
�v�����ŏ������ׂ��Ƃ���A�Ώ��̏����������܂���ł����BWin7�̂U�Sbit���Ƒ��������̂�?JAVA�̃o�[�W����
�������Ă��Ȃ��̂��H�ǂ�������Ȃ��̂ŁAV3.4���A���C���X�g�[�����A�V����V4.1.5_219���C���X�g�[�����܂����B
������͍��̂Ƃ���ُ�Ȃ��g���Ă��܂��B
�d���ł�Eclipse�̂����b�ɂȂ��Ă���̂ŁA�Ȃ�ƂȂ��g���܂����B����AKI-H8�Ŏg���Ă���
�J�����ɔ�ׂ�ƁA�Ƃ��Ă����͂ł��������Ȃ̂ŁA����������H8�͑��Ƃ��A���ꂩ��͂������ɂ��悤���ȁ`�Ǝv���܂����B
11.12.11 ��n�q���
11/27�̎��ɂȂ�܂����A�s���Ă��܂����B�Ȃ���N��������ł���C�����܂����B�I�[�v�j���O�t���C�g�ɍ��킹��
�������A�u���[�C���p���X�̑O�ɋA��悤�ɂ��܂����B�A��̓d�Ԃ͑_���ʂ�ƂĂ��Ă��܂������A�s���������ߕӂ�
���b�V�����̓d�ԕ��݂ɍ���ő�ςł����B
��s�W���͖��N�������������Ȃ̂ŁA���N�͊i�[�ɂ̓W�����悭���܂����B�藣���������x�B�e�����r�f�I��A
���������̃r�f�I�Ȃǂ������[�������ł��B
���É��s�Ȋw��
11.11.20 �������ۃ��{�b�g�W�@�Q�O�P�P
11/11�i���j�ɍs���Ă��܂����B���X���C���ŁA���ז������ŏo���������A���Ӑ[�����邱�Ƃ�
�o���܂���ł������A�����Ă��郍�{�b�g�����낢�댩��Ċy���������ł��B�������ʐ^���B���Ă����̂�
�\���Ă����܂��B
�ׂ́usampe japan ��[�ޗ��Z�p�W2011�v�����Ă����܂����B�u�قƂ�Ǖ����ނ̓W���v�Ƃ��������ł����B
11.10.23 ���q��n�q���
���N���s���Ă��܂����B�u���N�̓I�[�v�j���O�t���C�g���猩�悤�I�v�Ƒ��N�����čs������
�J�ŊJ�n���Ԃ��x���Ȃ��Ă��܂����B
AH-64�̒n��W��������A�ƃp���t���b�g�ɂ������̂ŁA�����ړ��Ăɍs�����̂ł����A���܂���ł����B��������E�E�E
�q��~��̔�s�W�������āA�t�g�|�U�O�̑��c�����m�ŁA�u���ɑf���ƈӗ~�̂���l���A�������K���Ă���̂��낤�ȁ[�v
�A�悭������Ȃ�����NjZ�ʂ��������Ǝv���܂����B�Ɠ����Ɂu���m�ȋ@�̂̐���v�Ƃ��������Ȃ�A��s���{�b�g�Ƃ������A
�������c�̂ق����ǂ����낤�Ƃ��v���܂����B���ꂩ��̓}�j���A�����c���邱�Ƃ̈Ӗ�������@������Ă䂭�̂��낤�Ǝv���܂����B
11.08.28 �������̌�
11.08.22 Android�[��
�����Ԉ����Ȃ��Ă����l�̂Łi�L�����A�Ƃ̌_��̎d���ɂ���Ă͖����H�j�����Ă݂܂����B
Dell��Streak�i5�C���`�̕��j�ł��B��Ђł������������͂��܂�A������������
���t�������ȕ��͋C������̂ŁA��Ǝ��v�����˂āA�v���O�����̍������o���悤���Ǝv���܂����B
���{�b�g�̕��ł͂ǂ�Ȃ��ƂɎg���邩�A���낢��l���Ă��܂��B
Android�{�Ƃ̂g�o��A���܂��܂Ȃg�o�ŏ\���������悤�Ȃ̂Ŕ���Ȃ������̂ł����A
�u�ǂ��̂��������甃���Ă��悢���ȁH�v�Ƃ������Ƃő�^���X�ɎQ�l�������ɍs���܂����B�����Œm�����̂ł����A
�@�퐧��p�̂n�r�Ƃ���Android�𗘗p���铮��������ART Linux�����Ƃ��Ă̋��ʉ����i�ޕ�
�g���₷���݂����ł��B�Ȃ̂Ń��{�b�g���̂��̂𐧌䂷��n�r�Ƃ��Ă����肩�ȁH�Ǝv���܂����B
���T�T�E���X
���炭�O�ɁA�e���r�Ńf�B�X�J�o���[�`�����l���̃��T�T�E���X�̔ԑg�����܂����B�������Č�����
�b�f�̓������A�����J�炵���ŋ��������Ă��܂������A�j�������͐��𑨂��Ă��銴�������ėǂ������ł��B
���̔ԑg���݂Ȃ���A�������Ă��j�������郂�T�T�E���X�̃��{�b�g���������ʔ������ȁ[�ȂǂƎv���܂����B
����Ȃ��Ƃ��l���Ă�����A���̉����������Ȃ��Ă����̂ŁA8���̉ċx�݂œ����A�Ȃ������ł�
�q���̍����玞�X�s���Ă��鍑���Ȋw�����قŃ��T�T�E���X�i�ȁj�̍��𒆐S�ɂ��āA
����͂b�f�̓������Ó��Ȃ̂��H���{�b�g�����Ƃ�����V���G�b�g��
�߂̉ғ��͈͂͂ǂ������炻��炵�����H�ȂǂȂǍl���Ȃ��炻�̑��̍��i�W�{���܂߂č����茩�Ă��܂����B
���܂܂ʼn��x�����Ă��鉻�ł����A�u�����Ƃ��炵�������̃��{�b�g�����v�Ƃ����������Ō��Ă݂�ƁA
�������������Ă��A�߂̉��͈͂�A�͂��o������Ȃǂ�������Ȃ����ƂɋC�����܂����B�����ŁA
�������ċؓ����F�̂�����m�邽�߂́u���̌����v��m�낤�ƁA���i����̕����̎Q�l�ɂ���錻������
�́u���j�^���i�^�ؓ��v�Ȃǂ��L�[���[�h�ɓ��{�Ð����w��̘_��(���L�t�q�k����c�k�ł��܂�)�Ȃǂ����Ȃ��班�������܂����B
�q����������Ƃ��̂��Ƃ��l����ƁA�q�����i�̐����J�͖��Ȃ��Ƃ��Ă��A�������悭���̂�
�e�Ղ���Ȃ��ȁ`�Ǝv���܂����B
11.08.01 �k�C�����s
�V���̉ċx�݂𗘗p����7/18�`7/21�܂ŁA�D�y�|����[�x�ǖ�̃��[�g�ŗ��s���Ă��܂����B���{�b�g��
�قƂ�NJW�Ȃ��ł����A�ߋ��Ƃ������Ƃł������r���̎ʐ^���Љ�悤�Ǝv���܂��B
�k�C���J��W
�x�ǖ�̃��x���_�[
���x���_�[�̃V�[�Y���͓����a���邱�Ƃ�����Ƃ����b����Web�Ō��܂����B����ŎԂ���ĕx�ǖ�܂�
�h���C�u���܂������A���ɂ������������Ƃ��Ȃ����K�ȃh���C�u�ł����B�V�C���ǂ������̂Ńo�C�N�ŗ���������
���ł����B���s���v��������Ƃ����É�����Ϗ��q�s���̃t�F���[������̂ŁA����̗��p���l���܂�����
�S�O���Ԃ�������̂Ō�����܂����B�J�[�t�F���[�݂����ɊȒP�Ƀo�C�N�ƈꏏ�ɏ��閯�ԋ@�̔�s�@��
��������̂ɂȁ[�Ǝv���܂����B
�r���A���H��n���Ă���L�c�l�ƎԂ�瀂��ꂽ�Ǝv�����^�k�L�H�����܂����B���\�ȒP�Ɍ�������̂��ȁ[��
�v���܂����B
���R������ VIDEO
��
��
��s�@����̕��i
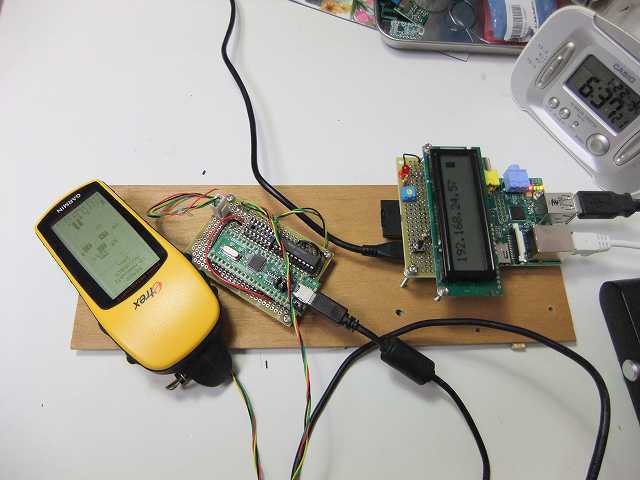
�u�d�g���o���Ȃ��d�q�@��̎g�p�v���n�j�ɂȂ��Ă���A���Ȃ̃e�[�u���̏�ɒu���āA�����q����⑫�ł��邩��A
��M���x�����Ă��܂������A���������V�`�W���x�͕⑫�ł��āA���x���\���Ȃ悤�ł����B
11.07.10 �n�r�@�o�[�W�����A�b�v(Windows 7 64bit)�̑���
FT2232D�̃h���C�o�C���X�g�[���Ɠ���m�F
�ǂ�����h���C�o���C���X�g�[�������̂��悭������Ȃ���ԂŎߑR�Ƃ��܂��A�R���g���[���p�l���ő�����
���zCOM�|�[�g���m�F�ł��A���̐�Ɍq�����Ă���Garmin��GPS����̃f�[�^��荞�݂��ُ�Ȃ��ł��܂����B
64bit�Ńv���O�����̍���
VB2008/2010�ɂ��ẮA���ɉ������Ȃ��Ƃ�����Ɏ��s���ɂ���ւ��炵���Ƃ������ƂŁA���ۂ�
�A�[�X���[�o�[�̃v���O�����Ȃǂ����āA�^�X�N�}�l�[�W���[�̃v���Z�X�^�u�ɂ�64bit�v���O���������œ����Ă���
�Ƃ�����m�F���܂����B�i*32���t���Ă��Ȃ��Ƃ�������܂����B�j
VC++2010�̕���express edition�ł�.Net Framework4��SDK��������64bit�l�C�e�B�u�Ƃ��ăR���p�C���ł��Ȃ�
�Ƃ������Ƃ��}�C�N���\�t�g��HP�œǂ�ŁA����ł͂Ƃ������ƂŃC���X�g�[�����Ď����Ă݂܂����B
SDK�C���X�g�[����̓^�[�Q�b�g�Ƃ��Ă��U�S��I�ׂ�悤�ɂȂ�܂������A�R���p�C���G���[�Ő��
�i�߂܂���ł����B�����̂Ƃ���͂܂��ݒ肪����Ȃ��悤�Ȋ����ł����B
11.07.03 �T�C�g�ɒ���������
�ŋ߁A2l1/2L2�̐���v���O�����́A�t�^���w�v�Z�Ɋւ��镔���ɂ��Ď���̃��[�����܂����B
KHR�ɉ��p�������Ƃ̂��Ƃł����B
�R�[�h�������Ă���P�O�N�߂������������ŁA���ɂȂ������������ɂȂ��̂Ŏv���o���Ƃ������A���߂�
�������������R�[�h��ǂ�ʼn��߂���̂���ςł����B
�ȑO����Ȃ�ƂȂ�KHR���A�L�b�g�̃��{�b�g���A�e�B�[�`���O�ł͂Ȃ��A�v�Z�œ���f�[�^�����ĕ����������l��
���\����̂ł͂Ȃ����ȁ`�H�Ǝv���Ă��܂����B�������A����̂悤�ȋ�̓I�Ȏ�����P�������������Ƃ�
�Ȃ������̂ʼn���y�[�W��݂��Ă��܂���ł����B�ł��A����ς菑���ΒN���̖��ɗ��������ȋC�����Ă����̂ŁA
�����Ă݂悤���ȁ`�Ǝv���܂����B
��s�@�̃v����
11.06.12 �n�r�@�o�[�W�����A�b�v(Windows 7 64bit)�̑���
��T�̑����ŁA���{�b�g�W�̃\�t�g�̃C���X�g�[���Ɠ���m�F�����܂����B
�n�������b�u�P�D�O��VideoInput���C�u����
mbed LPC 1768
mbed LPC 1768�p�̃V���A���ʐM�h���C�o
LPCXpresso-LPC1768
�v�U���S�S��
11.06.05 �o�b�̂n�r�@�o�[�W�����A�b�v
���C���Ŏg���Ă���f�X�N�g�b�v�o�b�i�}�E�X�R���s���[�^��Lm-i440S�j�̂b�h���C�u�i�e��160G�j�̎c�肪���Ȃ��Ȃ��Ă��܂����B
�܂��A����̈��萫�ɂ͓��ɖ�肠��܂��A�g��Ȃ��Ȃ����\�t�g�̎c�[���T�������Ȃ��Ă��܂����B
�����ŁA�w�����Ă���S�N�ڂɂȂ�A���낻��V�����o�b�ɕς������Ȃ��Ă��܂�����
�u���̂Ɠ����x�̒l�i�ŏ����\�͂��T�`�P�O�{�v�Ƃ������[�A�̖@�����l�������A�����Ō��߂Ă��锃���ւ��̊
�ɒB���Ă��Ȃ��悤�Ȃ̂ŁA�b�h���C�u�̌����ƃ������̒lj������邱�Ƃɂ��܂����B�������ɂ��ẮA
���܂莞�Ԃ����ƋK�i���ς���Ďg������̂���ɓ���Ȃ��Ȃ�̂ŁA�悢�������Ǝv���܂��B
�b�h���C�u���������ăN���[���C���X�g�[�����l�����Ƃ��ɁA�ǂ����Ȃ�Ƃ������Ƃłn�r���o�[�W�����A�b�v
���邱�Ƃɂ��܂����BWindows Vista SP2 32bit��Windows 7 SP1 64bit�ɂȂ�܂����B�w�������p�b�P�[�W��
Ultimate Edition�̃A�b�v�O���[�h�ł�\21,471-�i�ō��݁j�ł����B
�g�c�c�ƃ������́A���ꂼ��5000�~�ȉ��Ŕ�����͈͂ŁASATA 500G��DDR2-800��4G�Ƃɂ��܂����B
Vista��7�͂n�r�̃o�[�W�����ł䂭��6.0��6.1�ő卷�Ȃ����߁A�ǂ����Ȃ�Ƃ������Ń��������L�����p�o����A
64bit�̕����C���X�g�[�����܂����B
�ȑO�g���Ă����g�c�c����̃f�[�^�̈ڍs���I���A���{�b�g����Ɏg���\�t�g�����Ԃɓ���m�F���Ȃ���
�C���X�g�[����i�߂Ă��܂��B�i�܂����{�b�g�������Ƃ���܂ōs���Ă��܂���j
Vista�Ŏg���Ă���32bit�̃v���O�������h���C�o�ȊO�͎g����H�l�ŁA
�����܂ł̂Ƃ���͖�肠��܂���B�g���u���Ƃ����A�n�r�̃p�b�P�[�W�͂r�o�P�ł͂Ȃ������̂ŁA
���܂ł̃T�[�r�X�p�b�N��Windows Update������܂܂ɓK�p�����Ƃ���P�x�n���O�A�b�v�������x�ł����B
�g���Ă݂Ă̊����́A�f�X�N�g�b�v�ɏo���Ă���E�C���h�[�̐�ւ��Ȃ��A���������Ȃ����Ɗ����܂��B
�r�o�P�������o�Ă��܂������A�܂������z�M�ɏ���Ă��Ȃ������̂ŁA�ׂ���������ʂɗ������߁A�ċN����
�K�v�ȃT�[�r�X�p�b�N���m���Ԃ������悤�ł��B�͂��߂���SP1��T���ēK�p���ׂ��������Ǝv���܂����B
���A��c�[�����O
���N�̏t�͉ԕ����������A���Ԃ����������̂Łu�o�C�N�ŏo������v�Ƃ����̂��o���Ă��܂���ł����B
�~�J��������Ƃ����ɂR�T������S�O���܂ŋC�����オ��A�o�C�N�ŏo������̂ɂ͓K���Ȃ��C��ɂȂ�̂ŁA
�~�J�̍��Ԃł��傤�Njx���ɐ��ꂽ�u����(6/4)�����Ȃ��v�Ƃ������Ƃŏo�����Ă��܂����B��������K���ɁA
���ǂ�ȂƂ��납�������Ǝv���Ă����u�鎭�T�[�L�b�g�v�܂ōs���Ă��܂����B���̋A��ɁA���낻��Ă������낤
�Ƃ������ƂŁA���N�I�[�v�������u���j�A�E�S���فv�Ɋ���Ă��܂����B
�������[�X������Ă��Ȃ����Ȃ̂ŁA�����ȓ��ꗿ�ŃX�^���h�܂Ō����邩�Ǝv���čs�����Ƃ���A
�o�C�N�u����500�~�{���݂̗V���n�̓��ꗿ1600�~���Ƃ��āu�����I�v�Ǝv���܂����B
�u���j�A�E�S���فv�ł͏��C�@�֎Ԃ�C62���傫���āA�@�B�I�Ƃ������������ėǂ������ł��B���j�A��
������@�\���Ȃ��Ă܂�Ȃ��v���܂����B�ł��A�����܂ł̉������y�ɂȂ�̂ŁA����A�\��ʂ�ɊJ�Ƃ���
�ق����ȁ[�Ǝv���Ă��܂��B
�V�����̓W�����[�����Ă��āA��Ԃ�d���@�̐i����\����������W����A�ې���Ƃ̉f��Ȃǂ��ʔ��������ł��B
11.05.08 ��B�ό�
�f�v�́A���N�̏H�ɑ����A����܂��d���ōs���������Ŋό��������Ƃ��Ȃ�������B�i�R�[�X�͌F�{������������j�֍s���Ă��܂����B
��B�V�������ʂ����̂ŏ���Ă݂悤���Ǝv���܂������A���É����炾�Ǝ��Ԃ������Ĕ���̂ŁA������s�@���g���܂����B
���ʂɊό������̎ʐ^���B��܂������A�V�����f�W�J���i���w�~�P�O�A�f�W�^���~�S�W�Y�[���j�������čs�����̂ŁA�����ό��v�f
���炸�ꂽ�����ŎB�����ʐ^���������\���Ă������Ǝv���܂��B�O�r���g�킸�ɁA�ő�Y�[���߂��ŎB�����ʐ^������܂����A
�v�������͂�����ʂ��Ă��āA��U�����ǂ������Ă��邱�ƂɊ��S���܂����B
����͏��߂čs�����̂��P�T�N���炢�O�ŁA�Ō�ɍs�����̂��V�N���炢�O�ł����B�w���ӂ�
�V�����V���b�s���O�Z���^�[�̗ނ���������A�`�ɖʂ������ꂢ�Ȍ�������������ƁA��������Ă��ē�����Ă����ۂł����B
��ɔ����ف^���j�I�����������ĉ��A�ߑ�̗��j�̗������[�܂����悤�ȋC�����܂����B
11.04.03 �����̂��̌�
�w������P���قǂ����܂����B�܂��������������Ă��āA��߃o�N�e���A�̒lj����K�v�ȏ�Ԃł����A
���ɂ͓��ɖ��Ȃ��A����傫���������܂����B�炿����Ȃ̂ŁA�a�͗^���������A������ł��H�ׂ�
�݂����ȏ�ԂŌ��C�ł��B
�Q�l��
���̂Ƃ���u��g�u���@���{�b�g�w�S�@���{�b�g�C���e���W�F���X�v��ǂ�ł��܂��B���{�b�g�̐���V�X�e����
�l���鎞�A�@�\�̎������j�Ȃǂ̍l����������̂ɎQ�l�ɂȂ邢���{���ȂƎv���܂����B
�A�[�X���[�o�[�̐���V�X�e���Ƃ���������\�t�g�ɂ��āA���{�b�g�Ƃ��Ċm���ɓ�������ǂ�
���܂ЂƂ��肪�s�������������ŃX�b�L�����Ȃ��Ɗ����Ă���̂ł����A���̖{���Q�l��
���R�Ɛv���Ă����@�\�̊W���Ȃǂ����A�����Ɣ��W������`�ɑg�݂Ȃ��������ȁ`�ȂǂƎv���܂����B
11.03.21 �n�k�Q
�l�̂g�o�炵���A�����ɊW���邱�Ƃ����������Ă������Ǝv���܂��B
�����̂���
�g���̈��ۂȂ�
�S��
11.03.13 �n�k�P
��T�͕��ׂ��݂ŁA�����T�C�g���X�V���鎞�ԑтɐQ�Ă��܂����̂ōX�V�ł��܂���ł������A���T��
�������X�V���܂����B�ł��A�n�k�֘A�̃j���[�X���C�ɂȂ��ă��{�b�g���삪���܂��ɂ��܂���ł����B
���q�F�̏�̃j���[�X�����āA��̗ՊE���̂̂��ƂŁA�����������p�H�̃��{�b�g���J�����Ă���
�悤�Ȃ��Ƃ��v���o�����̂ł����A����͂��̌�ǂ��Ȃ����̂ł��傤�H�Ǝv���܂����B
�܂��A���H�̃A�N�Z�X������ɂȂ������̂��߁A���d���̒��ɓ����Ă������߂̃��{�b�g
�ɂ��A���l�q��@���𗘗p���āA���瓊���ł���悤�ȋ@�\���K�v�Ȃ̂��Ǝv���܂����B
11.02.27 �����w��
���z���̓x�ɂ�ނ�������Ă���ӏ܋��p�̐����ł����A���̐�����Z��ł���Ƃ����
����ꂻ���Ȃ̂ŁA���肸�ɒW���̔M�ы��p�����ꎮ�Ƌ����ė��܂����B
�Ƃ�����A�����������ӏ܂�����̂������ɂ���ƁA�o�b�̉�ʂ��������邱�Ƃ̖h�~�ɂȂ�̂ł��������ł��B
�G�L�i���̂S�j�i2008/03/02 �` 2010/12/12�j �G�L�i���̂R�j�i2006/01/22 �` 2008/01/14�j �G�L�i���̂Q�j�i2004/01/11 �` 2005/12/25�j �G�L�i���̂P�j�i2002/02/04 �` 2003/11/30�j �G�L�i���̂O�j�i1999/04/29 �` 2001/12/29�j �z�[���֖߂�

























































































































































































































{kind=link}