
偲傝偁偊偢丄埲壓偺條側帠傪傗偭偰傒傛偆偲嶌嬈傪偼偠傔傑偟偨丅
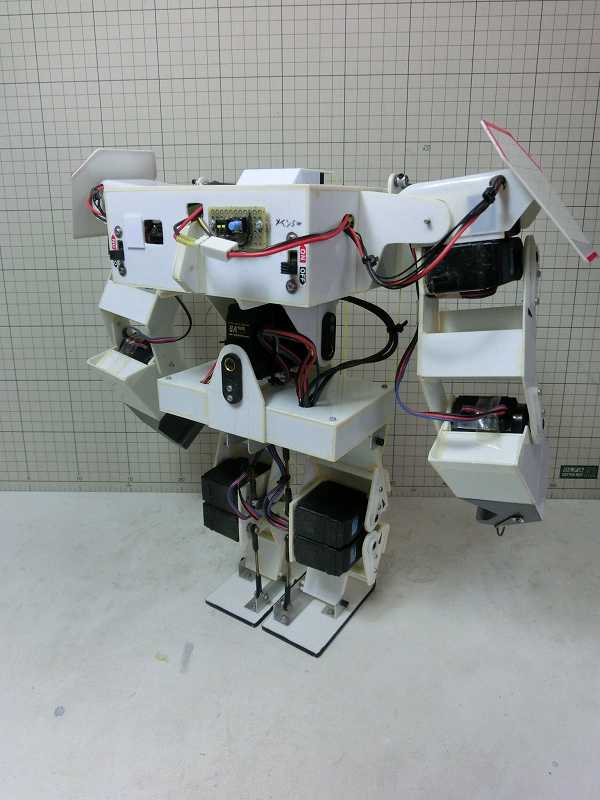
| 慡崅 | 320mm |
| 慡挿 | 160mm |
| 慡暆 | 260mm |
| 杮懱偺廳検 | 栺1200倗 |
| 崌寁帺桼搙 | 侾俀乮媟丗係丄榬丗俇丄崢丗俀乯 |
| 儌乕僞乕 |
俼俠梡僒乕儃儌乕僞乕 |
| 揹尮 |
僯僢働儖悈慺揹抮丂乮7.2V 700mAh乯 |
| 僙儞僒乕 |
|
| 俠俹倀 |
mbed LPC1768(32bit 96MHz) H8/3664F(16bit 16MHz) |
憖廲僨儌乮榬偺憖嶌偲堏摦婡擻乯
榬傕僕儑僀僷僢僪偐傜摦偐偣傞傛偆偵側偭偰偄傑偡丅 |
|
憖廲僨儌乮榬偺憖嶌乯
|
|
憖廲僨儌乮堏摦婡擻乯
|
 |
 |
 |
 |
 |
|
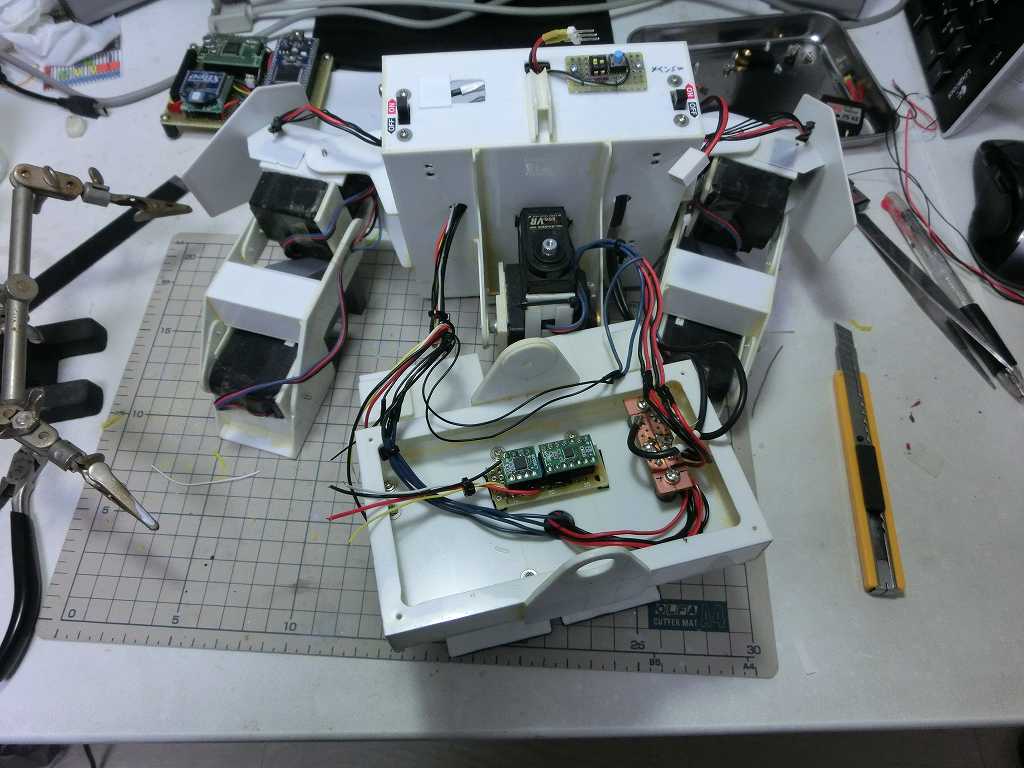
懌棤偺僞僢僠僙儞僒乮埑椡僙儞僒乯 曕峴拞偺懌棤偺愙抧偺嬶崌傪應掕偟偰曕峴偵 斀塮偝偣傞偙偲傪栚昗偵丄FSR-402偲偄偆 埑椡僙儞僒傪帋偟偰傒傑偟偨丅 |
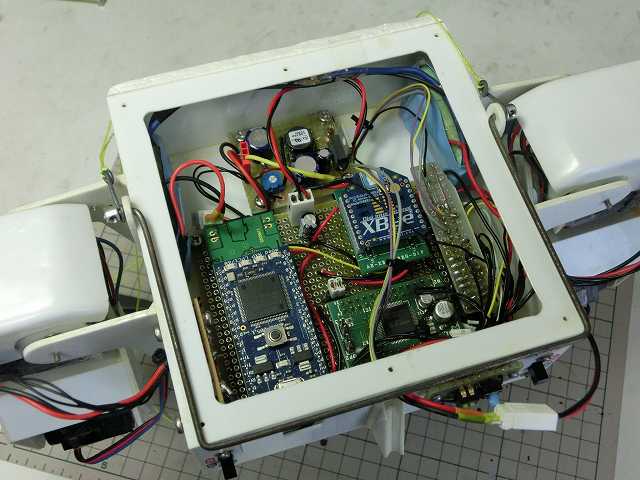
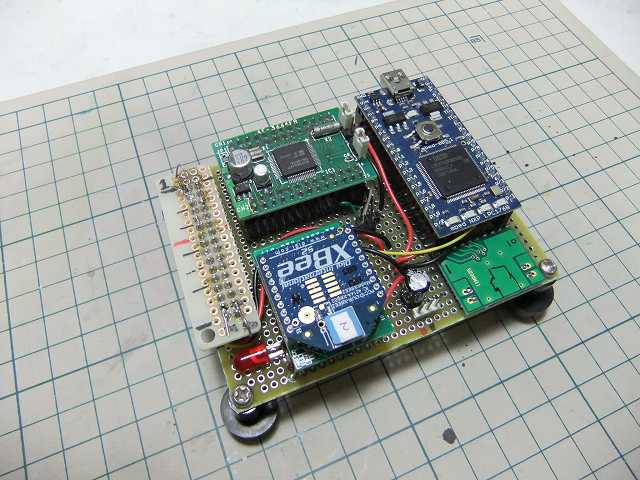
儅僀僐儞儃乕僪偲揹尮儐僯僢僩 |
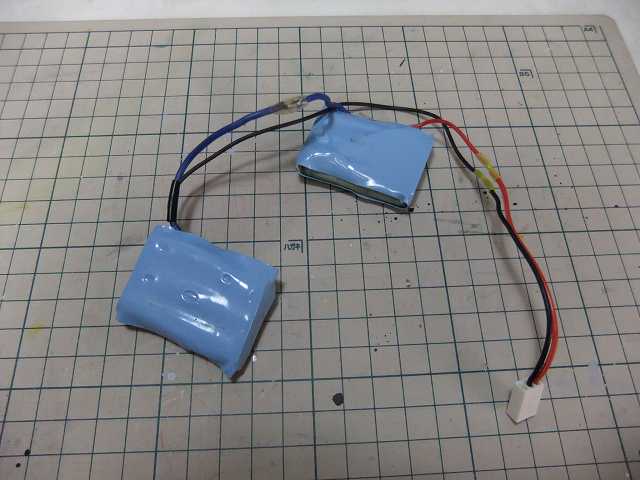
揹抮 7.2V/700mAh偺NiMH揹抮 僞僽晅偒揹抮傪偮側偓丄 僸僔僠儏乕僽偱僷僢僋偟傑偟偨丅 |
僕儍僀儘 STmicro偺L3GD20 偵姺憰偟傑偟偨丅 |
倃俛倕倕 PC懁偺柍慄婡偱偡丅 儘儃僢僩懁偵傕摨偠傕偺傪愊傫偱傑偡丅 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}