儅僀僫價弌斉姧丂媑栰峩巌丂挊 乽俇侽擔偱偱偒傞両擇懌曕峴儘儃僢僩帺嶌擖栧乿偱椺偲偟偰惢嶌偟偨
儘儃僢僩乽俹倕値係乿偵偮偄偰丄彂愋偺拞偱偺姰惉忬懺傪婲揰偲偟偨捛壛偺惢嶌傗帋峴嶖岆偺婰榐傪
婰偟偨惢嶌擔帍偱偡丅
偙偺儁乕僕偼乽儅僀僐儞儃乕僪僉僢僩偺戙懼俀乿偲偟偰傑偲傔傞偮傕傝偺婰帠偺梊旛挷嵏丂寭丂壓彂偒
偲偟偰彂偒巒傔偨傕偺側偺偱丄暘偐傝傗偡偔屆偄婰帠偐傜怴偟偄婰帠偵岦偗偰丄壓曽岦偵僗僋儘乕儖偟偰
撉傓傛偆偵彂偄偰偁傝傑偡丅
17.08.19
嶌椺偱巊偭偨俠僐儞僷僀儔偺斕攧廔椆
帪乆丄撉幰偺曽偐傜丄杮偱徯夘偟偰偄傞偲偍傝偵擖庤偱偒側偄晹昳丒慺嵽偵娭偡傞幙栤乛憡択儊乕儖傪捀偒傑偡丅
憗偄帪婜偵扨昳偱峸擖偱偒側偔側偭偨丄俫俉梡僐儞僷僀儔偵偮偄偰傕懡偔偺儊乕儖傪偄偨偩偄偰偄傑偡偑丄
偙傟偵偮偄偰偼丄摨偠僐儞僷僀儔傪娷傓暿偺僉僢僩傪戙懼昳偲偟偰徯夘偟偰偄傑偟偨丅
擮偺偨傔偄偮傕丄偦偺帪揰偱斕攧拞偐廐寧揹巕偺捠斕僒僀僩偱妋擣偟偰偐傜徯夘偺曉怣偟偰偄傑偟偨偑丄2017擭7寧偵
妋擣偟偨偲偙傠丄戙懼昳偺僉僢僩傕斕攧廔椆偺條偱偟偨丅
偦傫側傢偗偱丄偙傟偐傜偺懳墳傪峫偊偨偺偑丄俹倕値係崋媣乆偺惢嶌擔帍峏怴偺偒偭偐偗偱偡丅
堦墳婰帠偵嬤偄宍偱嶌傟傞丄H8/3067偺戙傢傝偵H8/3069傪巊偆乽儅僀僐儞儃乕僪僉僢僩偺戙懼乿婰帠傪2007擭偐傜
2008擭偵偐偗偰岞奐偟偰偄傑偡偑丄H8僔儕乕僘偑慡懱揑偵曗梡昳埖偄偵側偭偰偒偰偄傞條側偺偱丄乽儅僀僐儞儃乕僪僉僢僩偺戙懼俀乿
偲偟偰2017擭尰嵼偺堦斒揑側儅僀僐儞傪巊偭偨婰帠偺専摙傪巒傔傑偟偨丅
17.08.19
乽儅僀僐儞儃乕僪僉僢僩偺戙懼乿婰帠偺専徹
偙偺婰帠傪彂偄偰偐傜傕侾侽擭嬤偔偨偭偰偄傞偺偱丄崱偱傕弌棃傞偺偐偞偭偲尒捈偟偰傒傑偟偨丅
弴斣揑偵偼丄晹昳偑偦傠偆偙偲傪妋擣偟偨偺偪丄僜僼僩僂僃傾偺曽傪妋擣偟傑偟偨丅
- 儅僀僐儞儃乕僪偼
俙俲俬亅俫俉乛俁侽俇俋俥儅僀僐儞儃乕僪僉僢僩丂姰惉昳丂俢俼俙俵晅
捠斕僐乕僪丂K-02298丂亸2,700乮惻崬乯
偲偟偰攧偭偰偄傑偟偨丅慻傒棫偰嵪側忋偵丄抣抜偑俁妱壓偑偭偰偄傑偟偨丅
- 俫俉梡僐儞僷僀儔偼杮偲摨偠傕偺傪巊偭偰偄偰丄偙傟偼怴婯擖庤偱偒側偄偺偱丄偦偺屻偵捛壛偱彂偄偨
乽倗們們傪帋偡乮俫俉梡俠僐儞僷僀儔倗們們傪帋偟偵巊偭偰傒偨寢壥偺傑偲傔乯乿偺曽傪丄崱偺俹俠(Windows10 Home Edition 64bit斉丂1703)
偵僀儞僗僩乕儖偟偰僐儞僷僀儖弌棃傞偐帋偟偰傒傑偟偨丅
庤尦偵偁偭偨摉帪偺僉僢僩晅懏偺俠俢偐傜僀儞僗僩乕儖傪帋傒偨偲偙傠丄僀儞僗僩乕儔乕偑搑拞傑偱偟偐摦偒傑偣傫偱偟偨丅
擮偺偨傔怴偨偵 捠斕僐乕僪丂S-00033偲偟偰攧偭偰偄傞曽傪怴偨偵攦偭偰帋偟偰傒偨偲偙傠丄僀儞僗僩乕儖偐傜僐儞僷僀儖傑偱
峴偗傑偟偨丅
尨場偼挷傋偰偄傑偣傫偑乽巊偊傞側傜偽丄傑偁偄偄偐乿偲偄偆偙偲偵偟傑偟偨丅
- 俹俠梡偺僐儞僷僀儔偲偟偰杮偱偼Visual Basic 2005傪巊偭偰偄傑偟偨丅尰嵼偺僶乕僕儑儞偼2017偱偡丅憖嶌曽朄偼
偩偄偨偄摨偠側偺偱椙偟偲偟偰丄僜乕僗僐乕僪偺屳姺惈偵偮偄偰丄僒億乕僩僒僀僩偐傜僟僂儞儘乕僪偱偒傞傛偆偵偟偰偁傞
僾儘僕僃僋僩傪撉傒崬傫偱丄僐儞僷僀儖偐傜幚峴傑偱峴偗傞偐尒偰傒傑偟偨丅
偙偪傜偼帺摦傾僢僾僌儗乕僪偑偆傑偔摥偒丄寈崘偼弌傑偟偨偑幚峴傑偱峴偗傑偟偨丅
偲尵偆帠偱婰帠偑俀偮偵暘偐傟偰偄偰丄変側偑傜暘偐傝偵偔偄側乕偲巚偄傑偟偨偑丄傑偩桳岠偩偲妋擣偱偒傑偟偨丅
偁偲偱椙偔挷傋偨偲偙傠丄尨峞傪彂偄偨偲偒偵巆偟偨丄偡傋偰偺梫慺偑偦傠偭偨僾儘僕僃僋僩僼僅儖僟偐傜偺傾僢僾僌儗乕僪偼
惉岟偟傑偟偨偑丄僒億乕僩僒僀僩偺source_code.zip偵娷傔偰偄傞僜乕僗僐乕僪偼VB2010傑偱偼撉傒崬傒OK偱丄2017偱偼
偆傑偔峴偒傑偣傫偱偟偨丅
偦偆偄偭偨師戞偱丄杮婰帠偺source_code_171111.zip偵偼丄VB2015/2017偱撉傒崬傒僥僗僩傪偟偨僐乕僪傪
娷傔傑偟偨丅(2017/11/29捛婰)
17.08.20
乽儅僀僐儞儃乕僪僉僢僩偺戙懼俀乿偺曽恓専摙
側傞傋偔杮偺撪梕偵増偄偮偮丄崱尰嵼庤偵擖傝傗偡偄儅僀僐儞傪慖傇偲偄偆曽恓偱嬶懱揑偵専摙傪恑傔傑偟偨丅
偙傟偐傜巒傔傞恖偵偲偭偰丄巊偄曽偑娙扨偱僒儞僾儖偑懡偄Arduino UNO偑巊偊偨傜偄偄偐側乣偲尵偆帠偱堦偮攦偭偰
摦偐偟側偑傜峫偊偰傒傑偟偨偑丄巆擮側偑傜惈擻揑偵尩偟偄偲暘偐傝傑偟偨丅
偦偙偱丄師偵巊偄巒傔偑娙扨偱丄偡偱偵Pen4 Ver3偲偟偰幚嵺偵俹倕値係崋傪摦偐偟偨偙偲偑偁傞mbed LPC1768
(Arm Cortex-M3僐傾)傪嵦梡偡傞曽岦偱恑傔傞偙偲偲偟傑偟偨丅
乽儅僀僐儞儃乕僪僉僢僩偺戙懼俀乿偺婰帠偺彂偒曽偲偟偰偼丄恾柺偺尒曽傗岺嶌曽朄偵偮偄偰丄杮偱愢柧偟偰偄傞
偙偲偼椆夝嵪偲偟偰丄戙懼岺嶌偵娭楢偡傞帠傪偦傟偧傟偺復偵偮偄偰偺捛壛愢柧偺宍偱彂偔曽恓偲偟傑偟偨丅
17.08.20
17.09.18PG-03偺審傪捛婰
杮偺婰帠乽侾乣俀擔栚乿傊偺捛壛
慡懱揑側愝寁曽恓偼曄偊傑偣傫偑丄僕儍僀儘偼杮偺弌斉傛傝偁偲偱丄僗儅乕僩僼僅儞偺晹昳偲偟偰堦斒壔偟偨傕偺偑埨偔偰
巊偄傗偡偄偨傔丄偙偪傜偵曄峏偟傑偡丅
17.08.27
杮偺婰帠乽俁擔栚乿傊偺捛壛
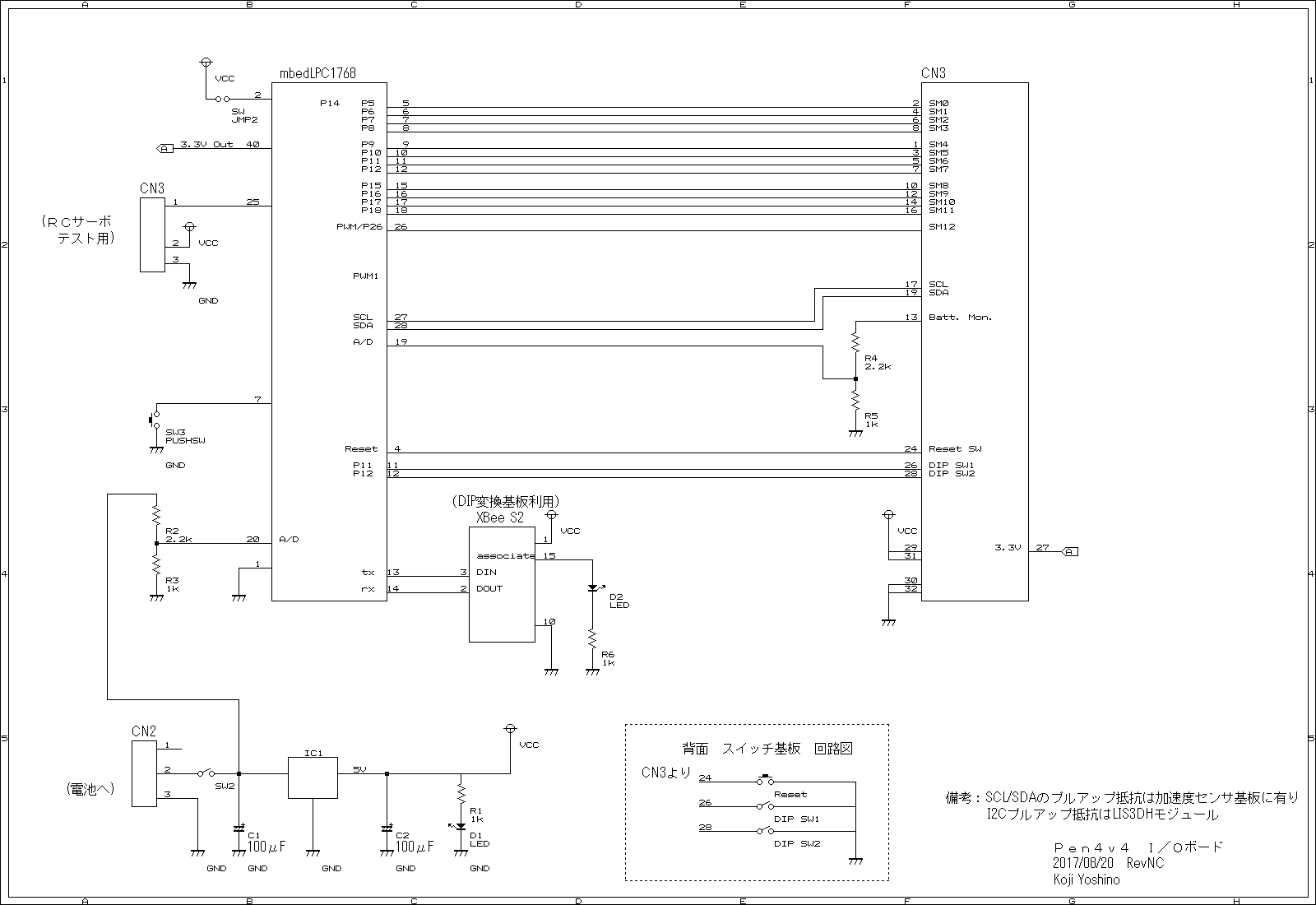
儅僀僐儞偑曄傢傞偺偱丄P45偺乽俬乛俷儃乕僪慡懱夞楬恾乿偑曄峏偵側傝傑偡偑丄乽俁擔栚乿偱嶌傞
乽揹尮夞楬乿晹暘偼曄峏柍偄偨傔婰帠偺捛壛偼偁傝傑偣傫丅
俬乛俷儃乕僪慡懱夞楬恾2017/08/27斉
旛峫
- 俁抂巕儗僊儏儗乕僞丗尰嵼偼巊偄曽偵屳姺惈偑偁偭偰丄傛傝岠棪偑椙偄DC/DC僐儞僶乕僞偑
擖庤梕堈偱偡丅偟偐偟側偑傜丄LM2940CT-5.0偼尰嵼傕擖庤壜擻側偆偊抣抜傕埨偄偺偱丄曄峏偟側偄偙偲偵偟傑偟偨丅
- 揹抮丗乽儔僕僐儞庴怣婡梡乿傕LiPo傗Life側偳儕僠僂儉宯偺揹抮偑堦斒壔偟偰偄傞偨傔偐丄杮偱巊偭偨僯僢働儖悈慺揹抮
偲摨偠巇條偺揹抮偼攧偭偰側偄傛偆偱偟偨丅戙傢傝偲偟偰偼乽儔僕僐儞庴怣婡梡乿偺僯僢働儖僇僪儈僂儉揹抮偱丄戝偒偝偑嬤偄俇V偺揹抮傪
慖傇偲埨偔偰埖偄傗偡偄偺偱偍姪傔偱偡丅乮儔僕僐儞摍偱姷傟偰偄傟偽丄儕僠僂儉宯偺揹抮傪巊偭偰傕椙偄偲巚偄傑偡丅乯
17.08.27
倣倐倕倓偱嶌椺偺傾儖僑儕僘儉偺僾儘僌儔儉傪嶌傟傞偐丠梊旛帋尡
17.09.03
杮偺婰帠乽係擔栚乿傊偺捛壛
17.09.03
杮偺婰帠乽俆擔栚乿傊偺捛壛
17.09.10
杮偺婰帠乽俇擔栚乿傊偺捛壛
儅僀僐儞儃乕僪偲俹俠傪偮側偖働乕僽儖偲偟偰偼丄巗斕偺倀俽俛偺働乕僽儖傪巊偆偺偱働乕僽儖偵娭偡傞
岺嶌偼偁傝傑偣傫丅傑偨丄儅僀僐儞儃乕僪傕僕儍儞僷慄傪僴儞僟晅偗偡傞摍偺岺嶌偼偁傝傑偣傫丅
偦傫側傢偗偱丄乽俇擔栚乿偵憡摉偡傞嶌嬈偼柍偔側傝傑偟偨丅妝偵側偭偰偄偄偱偡偹両
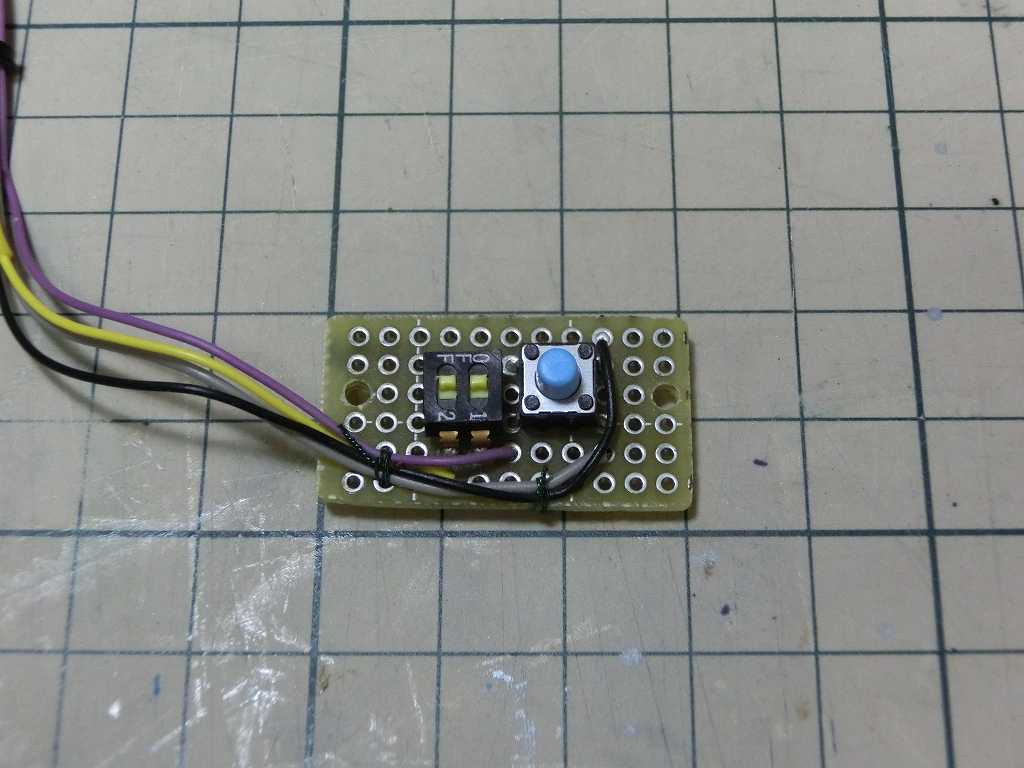
偪側傒偵働乕僽儖偼乽倣倐倕倓丂俶倃俹丂俴俹俠侾俈俇俉昡壙僉僢僩乿偵晅偄偰偒傑偡偑丄儘儃僢僩傪曕偐偣傞
帠傪峫偊偰丄摨偠婯奿乮倀俽俛働乕僽儖丂俙僆僗亅儈僯俛僆僗乯偱俀倣偔傜偄偺挿偝偺廮傜偐偄暔傪梡堄
偡傞偺偑椙偄偱偟傚偆丅


倀俽俛働乕僽儖丂俙僆僗亅儈僯俛僆僗
17.09.10
杮偺婰帠乽俈擔栚乿傊偺捛壛
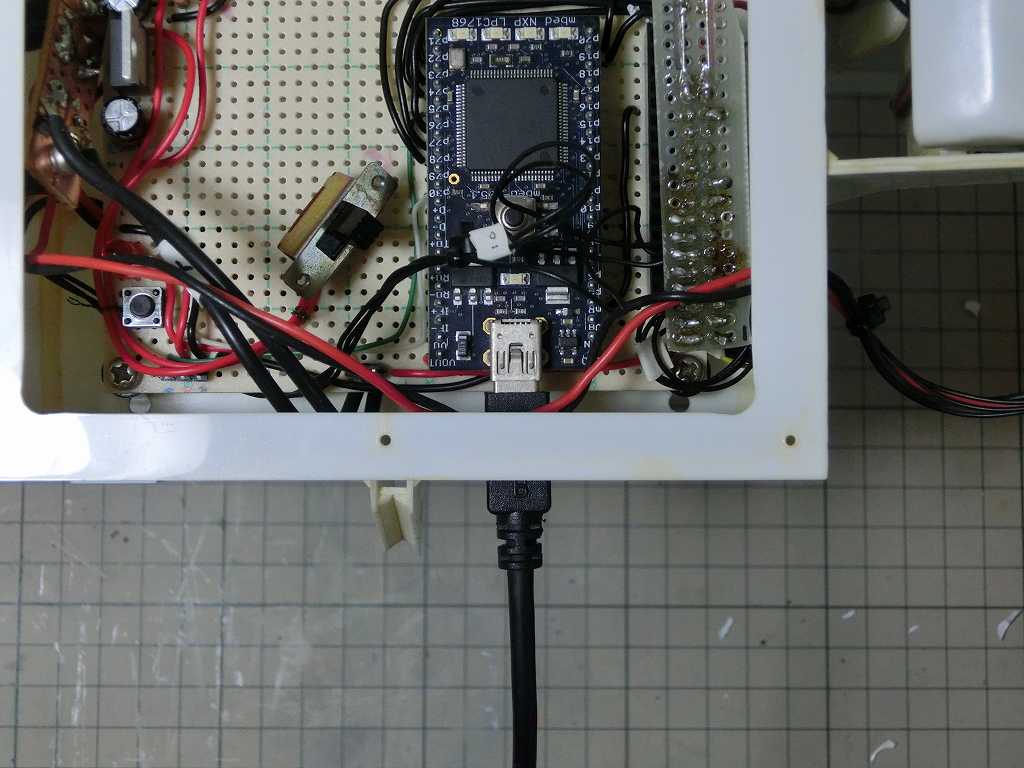
mbed LPC1768丂儅僀僐儞儃乕僪偼丄PC偵USB働乕僽儖偱愙懕偡傞偲丄儅僗僗僩儗乕僕僨僶僀僗乮USB儊儌儕乕偺椶乯
偲偟偰擣幆偝傟傑偡丅儅僀僐儞梡偺僾儘僌儔儉偼USB儊儌儕乕偵僼傽僀儖傪僐僺乕偡傞偺偲摨偠梫椞偱僐僺乕偟
偦偺屻儅僀僐儞儃乕僪傪儕僙僢僩偡傟偽幚峴偑巒傑傞巇慻傒偱偡偺偱丄H8偵偁偭偨乽儔僀僞乕僜僼僩乿偲乽儌僯僞僨僶僢僈乿
偼梫傜側偔側傝傑偟偨丅
戙傢傝偲尵偭偰偼壗偱偡偑丄俹俠偲儅僀僐儞儃乕僪偺娫偱壖憐俠俷俵億乕僩宱桼偺僔儕傾儖捠怣乮杮彂偱尦偐傜巊偭偰偄傞傗傝偐偨乯
偱捠怣偡傞偨傔偵丄乽mbed Windows serial port driver乿傪mbed偺僒僀僩偐傜僟僂儞儘乕僪偟偰俹俠偵僀儞僗僩乕儖偟傑偡丅
嶲峫倀俼俴丗
https://developer.mbed.org/users/weed/notebook/how_to_communicate_by_serial_port_on_windows7/
https://developer.mbed.org/handbook/Windows-serial-configuration
摦嶌妋擣偲偟偰偼丄PC偵儅僗僗僩儗乕僕僨僶僀僗偲偟偰擣幆偝傟丄Windows偺僨僶僀僗儅僱乕僕儍偱捛壛偝傟偨COM億乕僩傪妋擣偱偒傟偽俷俲偱偡丅
17.09.10
杮偺婰帠乽俉擔栚乿傊偺捛壛
儅僀僐儞梡偺俠亄亄僐儞僷僀儔
倣倐倕倓偲偄偆僆儞儔僀儞偺僐儞僷僀儔傪巊偆偺偱丄俹俠傊偺僀儞僗僩乕儖偼偁傝傑偣傫丅傑偨丄僾儘僌儔儉偺擖椡偵俹俠梡僐儞僷僀儔傪棅傞昁梫傕柍偔側傝傑偟偨丅
弨旛偲偟偰偼儐乕僓乕搊榐偑昁梫偱丄僐儞僷僀儔偼柍椏偱棙梡偱偒傑偡丅偙偺婰帠傪彂偄偨帪揰偺棳傟傪娙扨偵彂偔偲埲壓偺捠傝偱偡丅
侾丏倣倐倕倓偺僒僀僩偵傾僋僙僗偡傞丅乮https://developer.mbed.org乯
俀丏乽Login/Signup乿儕儞僋傪僋儕僢僋偡傞丅
俁丏Signup偺曽偱儐乕僓乕搊榐偡傞丅
係丏儐乕僓乕俬俢傪擖庤偟偨傜儘僌僀儞偡傞丅
俆丏乽Compiler乿儕儞僋傪僋儕僢僋偟丄僐儞僷僀儔偺儁乕僕傊恑傓丅
僐儞僷僀儔乮俬俢俤乯偺僀儊乕僕
嶲峫倀俼俴丗乽mbed傪巒傔傑偟傚偆両乿偲偄偆擔杮岅偺儁乕僕偱LPC1768偲mbed傪巊偄巒傔傞傑偱偺僗僥僢僾偑堈偟偔愢柧偝傟偰偄傑偡丅
僐儞僷僀儔帺懱傗夋柺偺儊僯儏乕偼僶乕僕儑儞傾僢僾偟偰偄偰彮偟堘偄傑偡偑丄廫暘嶲峫偵側傞偱偟傚偆丅
https://developer.mbed.org/users/nxpfan/notebook/lets_get_started_jp/
僾儘僌儔儈儞僌
僾儘僌儔儈儞僌偼埲壓偺棳傟偲側傝傑偡丅LPC1768偲偄偆儅僀僐儞梡偵偼杮偱巊偭偨俫俉梡僐儞僷僀儔偺條偵丄
儗僕僗僞偺愝掕偐傜擖傞僞僀僾傕偁傝傑偡偑丄mbed偼偦偺曈傪徣棯偱偒傞偺偱丄偙偙悢擭丠揹巕岺嶌偱堦斒揑側
Arduino IDE偲摨偠條側姶偠偱巊偊傑偡丅
侾丏儅僀僐儞儃乕僪丂傪俹俠傊愙懕
俀丏僾儘僕僃僋僩掕媊
俁丏僐乕僪擖椡
係丏僐儞僷僀儖
俆丏儅僀僐儞儃乕僪偺儅僗僗僩儗乕僕僨僶僀僗乮椺偺夋柺偱偼俥僪儔僀僽乯偵曐懚
俇丏儅僀僐儞儃乕僪忋偺儕僙僢僩儃僞儞傪墴偡丅
偡傞偲丄儅僗僗僩儗乕僕僨僶僀僗偲偟偰尒偊偰偄傞僄儕傾偐傜儅僀僐儞撪晹偺儊儌儕乕偵僾儘僌儔儉偑僐僺乕偝傟偨屻幚峴偑巒傑傝傑偡丅
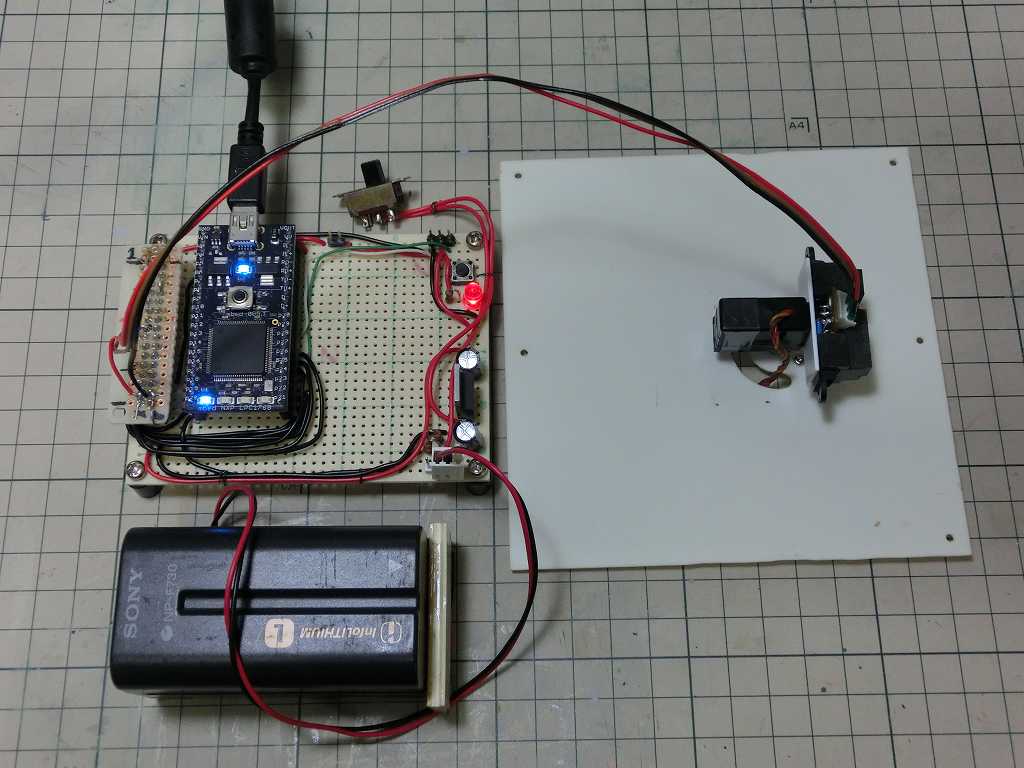
偪側傒偵偙偙偱偼丄揹尮偼倀俽俛宱桼偱俹俠偐傜偲傞偨傔揹抮愙懕晄梫偱偡丅
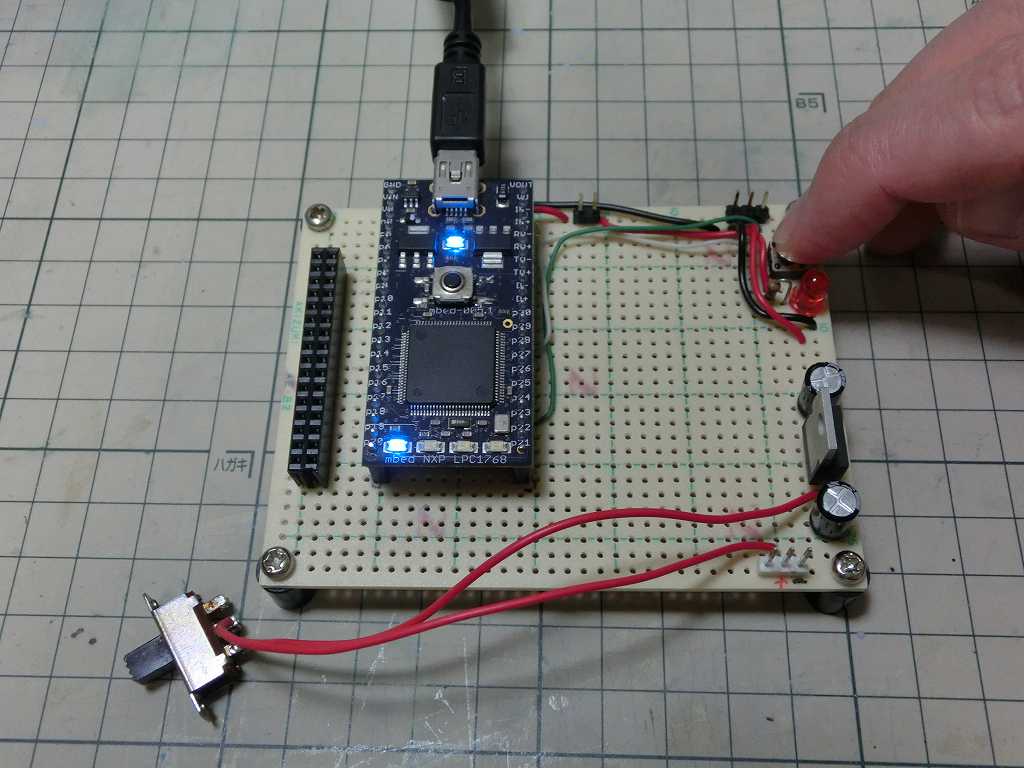
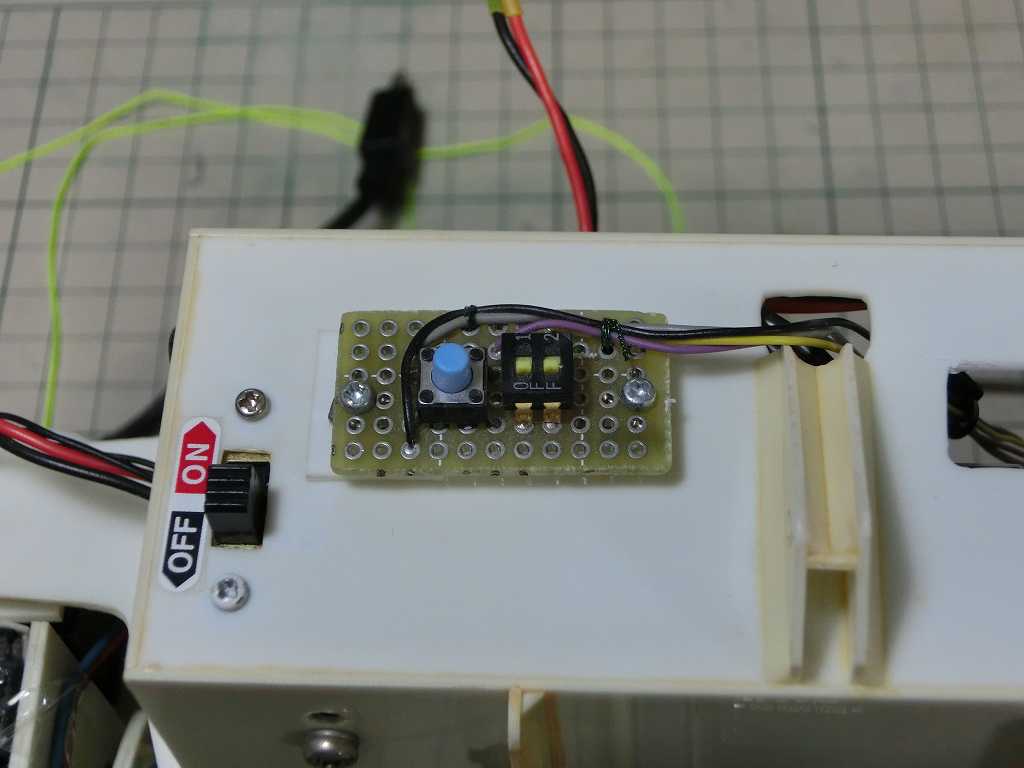
P123偺摦嶌妋擣丅
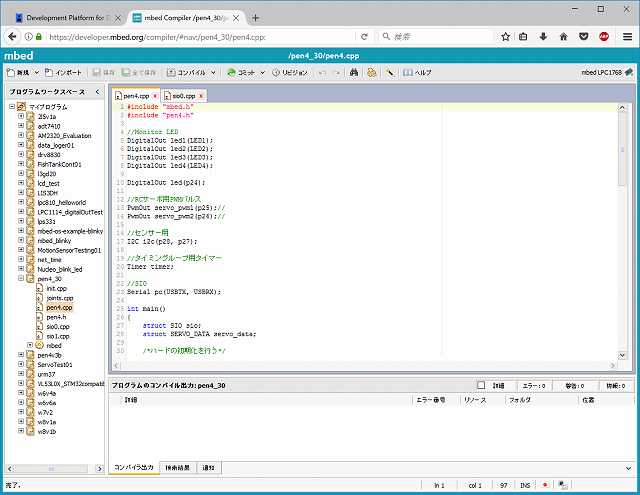
揰柵偝偣傞俴俤俢偼儅僀僐儞儃乕僪忋偺傕偺傪棙梡偟偰偄傑偡丅乮幨恀偺壓懁偺俴俤俢乯
僜乕僗僐乕僪乮僞僋僩僗僀僢僠憖嶌偱俴俤俢揰柵乯
#include "mbed.h"
//儅僀僐儞儃乕僪忋偵係屄暲傫偩俴俤俢偺侾偮傪led1偺柤慜偱掕媊
DigitalOut led1(LED1);
//P30僺儞傪擖椡丄僾儖傾僢僾愝掕桳丂偱sw3偲偄偆柤慜偵愝掕
DigitalIn sw3(p30, PullUp);
int main()
{
//柍尷儖乕僾奐巒
while(1) {
//俽倂俁偺忬懺傪僠僃僢僋偡傞
if(sw3 == 1) {
//僗僀僢僠偑墴偝傟偰偄側偄帪偼俴俤俢侾徚摂
led1 = 0;
} else {
//僗僀僢僠偑墴偝傟偰偄傞帪俴俤俢侾揰摂
led1 = 1;
}
}
}
|
17.09.10
杮偺婰帠乽俋擔栚乿傊偺捛壛
17.09.10
杮偺婰帠乽侾侽擔栚乿傊偺捛壛
偙偙傑偱偱怗傟偨傛偆偵丄僾儘僌儔儉彂偒崬傒摍偺埖偄偑堎側傞偺傒偱偡丅僾儘僌儔儉偼杮偺婰帠偲摨條
俋擔栚偺儌僲偺丄怣崋弌椡愭傪俴俤俢偐傜丄僥僗僩梡俼俠僒乕儃偺僐僱僋僞偵曄偊偨偩偗偱偡丅
Timer僋儔僗偼寁應偡傞帪娫傪m sec傗兪 sec偱梌偊傜傟傞偺偱丄儅僀僐儞偺僋儘僢僋廃攇悢偐傜寁嶼偡傞
夁掱偑柍偔側傝娙扨偵側傝傑偟偨丅
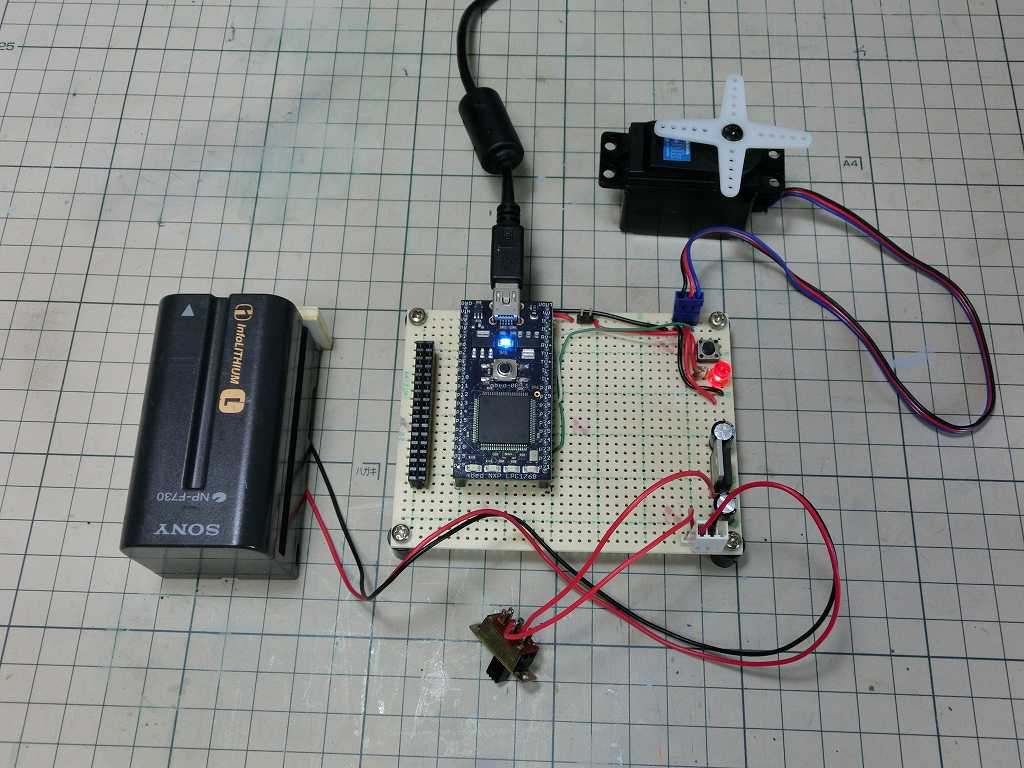
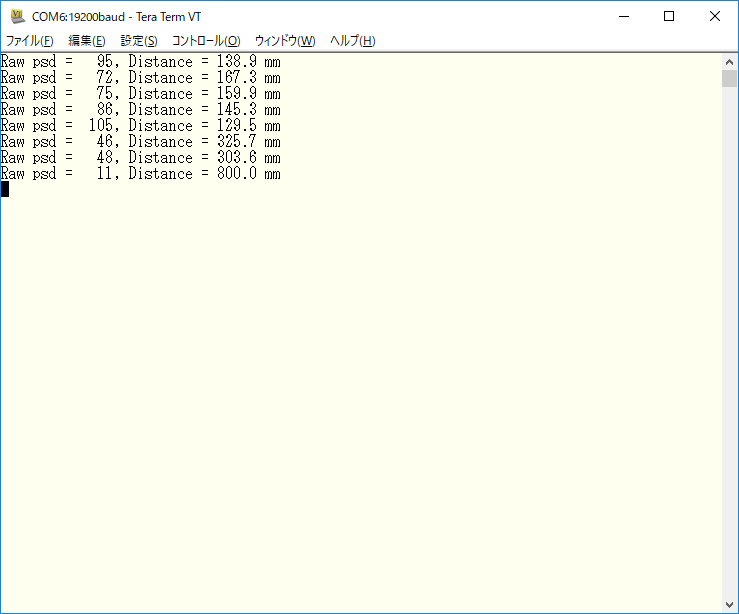
P138偺摦嶌妋擣丅
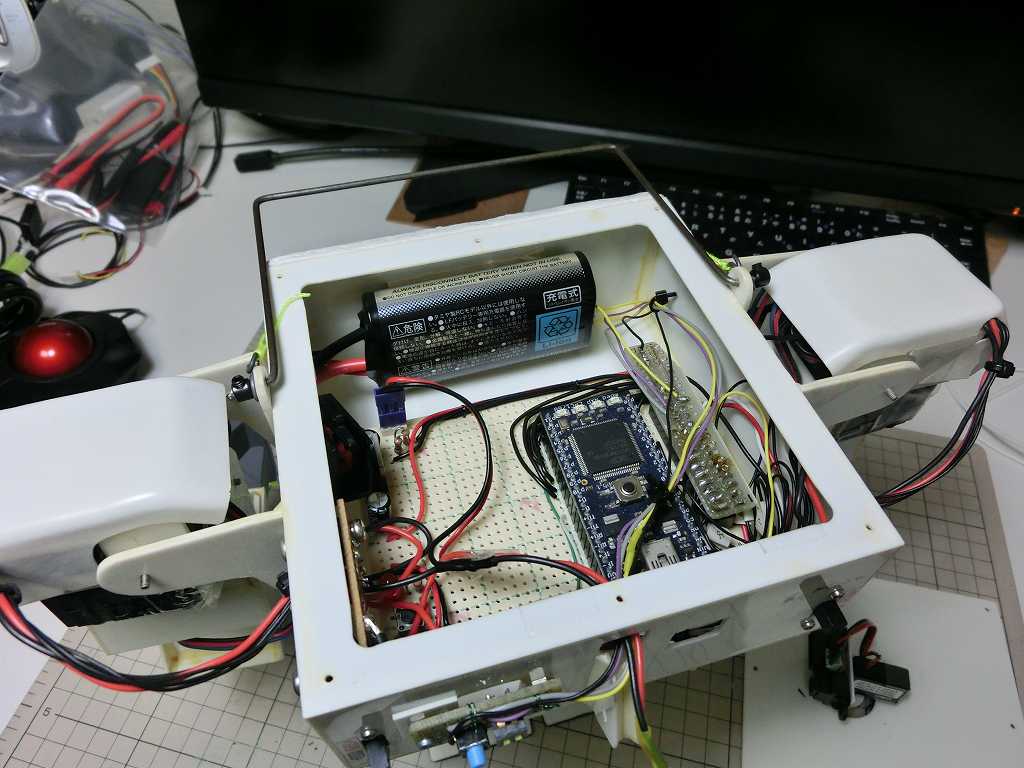
揹抮偼2005擭崰偐傜巊偭偰偄傞SONY偺僴儞僨傿乕僇儉梡偺7.2V偺儕僠僂儉僀僆儞揹抮偱偡丅
幏昅偟偰偄偨崰偺僯僢僇僪揹抮傗僯僢働儖悈慺揹抮偼巊偊側偔側偭偰偟傑偄傑偟偨偑丄偙偺揹抮偼
傑偩巊偊傞偺偱丄嶣塭偵巊偄傑偟偨丅
僜乕僗僐乕僪乮僞僋僩僗僀僢僠憖嶌偱俼俠僒乕儃傪摦偐偡乯
#include "mbed.h"
//儅僀僐儞儃乕僪忋偵係屄暲傫偩俴俤俢偺侾偮傪led1偺柤慜偱掕媊
DigitalOut led1(LED1);
//GPIO偺25斣傪sm13偲偄偆柤慜偱弌椡偵愝掕
DigitalOut sm13(p25);
//P30僺儞傪擖椡丄僾儖傾僢僾愝掕桳丂偱sw3偲偄偆柤慜偵愝掕
DigitalIn sw3(p30, PullUp);
//僞僀儈儞僌儖乕僾梡僞僀儅乕
Timer timer;
int main()
{
//柍尷儖乕僾奐巒
while(1) {
//僞僀儅乕偺僇僂儞僩傪僋儕傾
timer.reset();
timer.start();
//sm13傪侾偵僙僢僩
sm13 = 1;
//俽倂俁偺忬懺傪僠僃僢僋偡傞
if(sw3 == 1) {
//僗僀僢僠偑墴偝傟偰偄側偄帪偼僷儖僗暆傪1.5m sec偵偡傞
while(timer.read_us()<1500);
} else {
//僗僀僢僠偑墴偝傟偰偄傞帪偼僷儖僗暆傪2.0m sec偵偡傞
while(timer.read_us()<2000);
}
//sm13傪侽偵僙僢僩
sm13 = 0;
//20.0m sec宱夁偡傞傑偱懸偮
while(timer.read_us()<20000);
}
}
|
17.09.10
杮偺婰帠乽侾侾乣侾俆擔栚乿傊偺捛壛
17.09.18
杮偺婰帠乽侾俇擔栚乿傊偺捛壛
17.09.18
杮偺婰帠乽侾俈擔栚乿傊偺捛壛
Visual Basic
偙偙傪彂偄偰偄傞帪揰偱丄Visual Basic偺嫙媼宍懺偑幏昅帪揰偲曄傢偭偰偄傑偟偨丅
Visual Studio 2017偲偟偰Basic傗C++偺奐敪娐嫬偑摑崌偝傟偰偄偰丄僀儞僗僩乕儖偡傞偲偒偵昁梫側
婡擻傪慖傇宍偵側偭偰偄傑偟偨丅
巊偆偲偒傕Visual Studio 2017偲偟偰婲摦偟丄僾儘僕僃僋僩傪掕媊偡傞偲偒偵Visual Basic傪慖傇宍偵
側偭偰偄傑偟偨丅
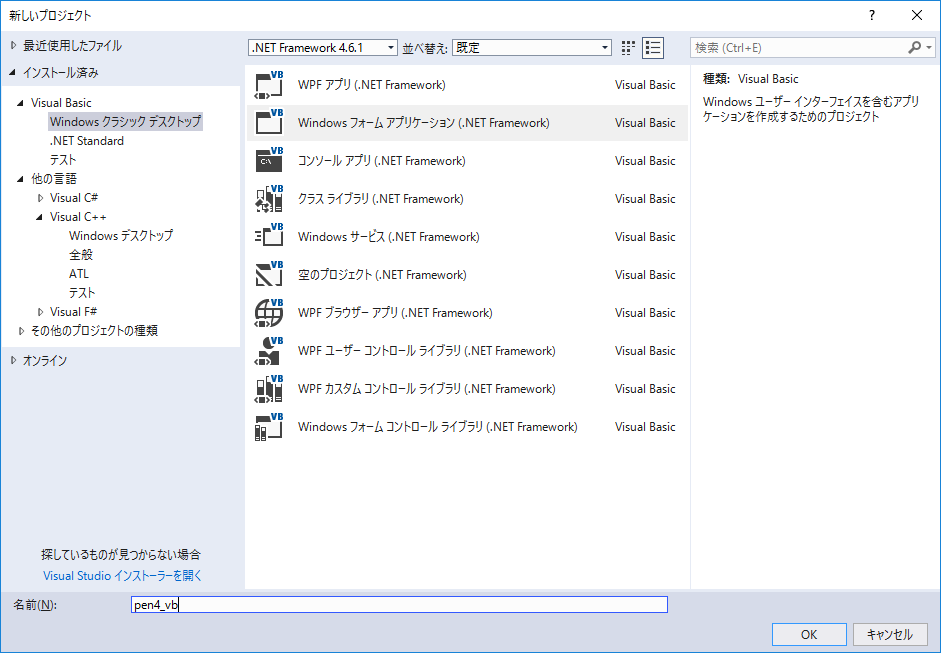
P208偺夋柺偼偙傫側姶偠偵側傝丄
乽Visual Basic -> Windows 僋儔僔僢僋丂僨僗僋僩僢僾->Windows丂僼僅乕儉傾僾儕働乕僔儑儞(.Net Framework)乿
偺弴偱慖戰偟偨屻丄怴偟偄僾儘僕僃僋僩偺乽柤慜乿偲偟偰pen4_vb傪擖椡偟偰巒傔傑偡丅
僾儘僌儔儉偺曄峏揰
俼俠僒乕儃偺俹倂俵僷儖僗暆傪巜掕偡傞悢抣傪儅僀僋儘昩扨埵偵曄峏偟偨偙偲偵晅悘偟偰
僾儘僌儔儉偺拞偺悢抣偑彮偟曄傢傝傑偡丅
- P216偺俼俠僒乕儃弌椡偺僨僼僅儖僩抣丗3750->1500
- P218偺曄悢偵戙擖偡傞抣丂servo_max丗5500->2400
- P218偺曄悢偵戙擖偡傞抣丂servo_min丗1500->650
- P218乣P220偱俼俠僒乕儃偺弌椡抣傪憹尭偡傞悢抣丗25->10, 250->100
17.09.18
杮偺婰帠乽侾俉擔栚乿傊偺捛壛
偙偙傕mbed傪棙梡偟偨僾儘僌儔儈儞僌偵側傝傑偡丅
P224曈傝偱僜乕僗僐乕僪傪暘妱偟偰偄傑偡偑丄俋乣侾侽擔栚偁偨傝偱怗傟偨傛偆偵丄儗僕僗僞愝掕偵娭偡傞僐乕僪偑
柍偔側傝傑偡丅偦偺偨傔init.c偼彂偔偙偲偑柍偄偺偱徣棯偟丄pen4.h偼偩偄傇娙扨偵側傝傑偟偨丅
僾儘僌儔儉偺棳傟傗峔惉偼曄偊偢丄儅僀僐儞偺僴乕僪僂僃傾偵娭傢傞晹暘傪彂偒姺偊傑偟偨丅
偦偺懠丄僕儍僀儘偼俼俠僒乕儃偲摨偠俹倂俵僷儖僗傪擖弌椡偡傞PG-03偐傜丄杮偺弌斉傛傝偁偲偱僗儅乕僩僼僅儞偺晹昳偲偟偰
堦斒壔偟偨I2C愙懕僞僀僾偵曄峏偡傞偺偱丄帋偟偵摦偐偟偰傒傞僐乕僫乕偼撉傓偩偗偲側傝傑偡丅
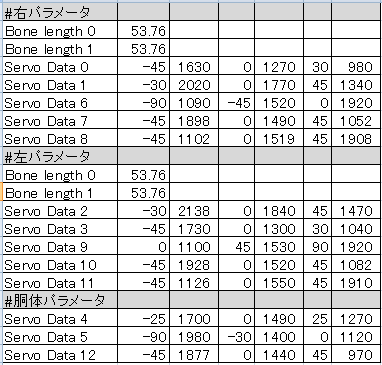
pen4.h
/**************/
/*峔憿懱偺愰尵*/
/**************/
/*僔儕傾儖捠怣娭楢峔憿懱*/
struct SIO
{
unsigned char command; /*僐儅儞僪僉儍儔僋僞*/
};
/*俼俠僒乕儃娭楢峔憿懱*/
struct SERVO_DATA
{
unsigned char switch_signal; /*惂屼怣崋僗僀僢僠*/
unsigned int data_test[4][4]; /*僥僗僩梡弌椡僨乕僞*/
};
/************************/
/*娭悢偺僾儘僩僞僀僾愰尵*/
/************************/
/*sci0.c 偵娷傑傟偰偄傞娭悢*/
void sci_write_char(unsigned char data);
void sci_write_uint(unsigned int data);
unsigned char sci_read_char_wait(void);
unsigned char sci_read_char_no_wait(void);
unsigned int sci_read_uint(void);
void sci_print_string(char string[80]);
void sci_print_int(int data);
/*sci1.c 偵娷傑傟偰偄傞娭悢*/
void sio_comm1(struct SIO *sio, struct SERVO_DATA *servo_data);
|
pen4.cpp
#include "mbed.h"
#include "pen4.h"
//儅僀僐儞儃乕僪忋偵係屄暲傫偩俴俤俢偺侾偮傪led1偺柤慜偱掕媊
DigitalOut led1(LED1);
//GPIO偺25斣傪sm13偲偄偆柤慜偱弌椡偵愝掕
DigitalOut sm13(p25);
//P30僺儞傪擖椡丄僾儖傾僢僾愝掕桳丂偱sw3偲偄偆柤慜偵愝掕
DigitalIn sw3(p30, PullUp);
//僞僀儈儞僌儖乕僾梡僞僀儅乕
Timer timer;
//SIO
Serial pc(USBTX, USBRX);
int main()
{
unsigned char i, j;
struct SIO sio;
struct SERVO_DATA servo_data;
/*僴乕僪偺弶婜壔傪峴偆*/
pc.baud(19200);
//俼俠僒乕儃弌椡僨乕僞偺弶婜壔傪峴偆
for(j = 0; j < 4; j++) {
for(i = 0; i < 4; i++) {
servo_data.data_test[i][j] = 1500;
}
}
//惂屼怣崋弌椡僗僀僢僠傪俷俶偱弶婜壔
servo_data.switch_signal = '1';
//柍尷儖乕僾奐巒
while(1) {
//僞僀儅乕偺僇僂儞僩傪僋儕傾
timer.reset();
timer.start();
//惂屼怣崋弌椡僗僀僢僠偑俷俶偺応崌怣崋傪弌椡偡傞
if(servo_data.switch_signal == '1') {
//儌僯僞偲偟偰俴俤俢揰摂
led1 = 1;
//sm13傪侾偵僙僢僩
sm13 = 1;
/*俹俠偐傜偺庴怣僨乕僞偵廬偭偨帪娫懸偮*/
while(timer.read_us() < servo_data.data_test[1][3]);
//sm13傪侽偵僙僢僩
sm13 = 0;
} else {
/*俴俤俢徚摂*/
led1 = 0;
}
/*僐儅儞僪偑庴怣偝傟偰偄傞偐妋擣偡傞*/
sio.command = sci_read_char_no_wait();
/*僐儅儞僪偑庴怣偝傟偰偄偨応崌偼丄僐儅儞僪偵廬偭偨張棟傪峴偆*/
if(sio.command != 0) {
sio_comm1(&sio, &servo_data);
}
/*1/50昩宱夁偡傞傑偱懸偮*/
while(timer.read_us()<20000);
}
}
|
sio0.cpp
#include "mbed.h"
#include "pen4.h"
extern Serial pc;
/*******************************************************/
/*unsigned char宆曄悢侾僶僀僩傪僔儕傾儖億乕僩傊弌椡偡傞*/
/*堷悢丗data 弌椡偡傞曄悢 */
/*曉抣丗側偟 */
/*******************************************************/
void sci_write_char(unsigned char data)
{
while (!pc.writeable());
pc.putc(data);
return;
}
/***********************************************/
/*unsigned int宆曄悢 傪僔儕傾儖億乕僩傊弌椡偡傞*/
/*堷悢丗data 弌椡偡傞曄悢 */
/*曉抣丗側偟 */
/***********************************************/
void sci_write_uint(unsigned int data)
{
unsigned int ii;
unsigned char data_L, data_H;
/*unsigned int偺僨乕僞傪unsigned char偺僨乕僞俀屄偵暘妱曄姺偡傞*/
if(data > 255) {
ii = data / 256;
data_H = (unsigned char)ii;
} else {
ii = 0;
data_H = 0;
}
ii = data - ii * 256;
data_L = (unsigned char)ii;
/*僨乕僞傪弌椡偡傞*/
sci_write_char(data_H);
sci_write_char(data_L);
return;
}
/*************************************************************/
/*unsigned char宆曄悢乮侾僶僀僩乯傪僔儕傾儖億乕僩偐傜擖椡偡傞*/
/*旛峫丗僨乕僞偑棃傞傑偱懸偮 */
/*堷悢丗側偟 */
/*曉抣丗unsigned char宆僨乕僞 */
/*************************************************************/
unsigned char sci_read_char_wait(void)
{
unsigned char data;
while(!pc.readable());
data = pc.getc();
return(data);
}
/*************************************************************/
/*unsigned char宆曄悢乮侾僶僀僩乯傪僔儕傾儖億乕僩偐傜擖椡偡傞*/
/*旛峫丗僨乕僞偑棃偰偄側偗傟偽側偵傕偣偢婣傞 */
/*堷悢丗側偟 */
/*曉抣丗unsigned char宆僨乕僞 */
/*************************************************************/
unsigned char sci_read_char_no_wait(void)
{
unsigned char data;
data = 0;
/*庴怣儗僕僗僞偵僨乕僞偑偁傞偐僠僃僢僋偡傞丅柍偗傟偽婣傞*/
if(pc.readable()) {
data = pc.getc();
}
return(data);
}
/************************************************************/
/*unsigned int宆曄悢乮俀僶僀僩乯傪僔儕傾儖億乕僩偐傜擖椡偡傞*/
/*旛峫丗僨乕僞偑棃傞傑偱懸偮 */
/*堷悢丗側偟 */
/*曉抣丗unsigned int宆僨乕僞 */
/*************************************************************/
unsigned int sci_read_uint(void)
{
unsigned int data;
unsigned int data_L, data_H;
/*unsigned char偺僨乕僞俀屄傪庴偗庢傞*/
data_H = (unsigned int)sci_read_char_wait();
data_L = (unsigned int)sci_read_char_wait();
/*unsigned int偺僨乕僞偵曄姺偡傞*/
data = data_H * 256 + data_L;
return(data);
}
/************************************************************/
/*unsigned char宆曄悢80僶僀僩 max 傪僞乕儈僫儖夋柺偵昞帵偡傞*/
/*堷悢丗string 昞帵偡傞暥帤楍 */
/*曉抣丗側偟 */
/************************************************************/
void sci_print_string(char string[80])
{
unsigned char i;
/*庴偗庢偭偨僨乕僞傪僞乕儈僫儖夋柺偵昞帵偡傞*/
i = 0;
do {
sci_write_char((unsigned char)string[i]);
i++;
} while(string[i] != 0 && i < 80);
/*暥帤楍偺廔傢傝偑丂= 偱側偗傟偽夵峴偡傞丅丂=丂偺応崌偼
丂師夞偺暥帤楍偑摨偠峴偵楢側傞丅曄悢偺撪梕昞帵側偳偵巊偆*/
if(string[i - 1] != '=') {
/*夵峴僐乕僪傪憲怣偡傞*/
sci_write_char(0x0d);
sci_write_char(0x0a);
}
return;
}
/*************************************************/
/*int宆偺惍悢傪僞乕儈僫儖夋柺偵昞帵偡傞 */
/*堷悢丗data 昞帵偡傞惍悢 */
/*曉抣丗側偟 */
/*************************************************/
void sci_print_int(int data)
{
unsigned int i, j, bitptn;
char string[16];
/*data偺惓晧傪敾抐偟晞崋傪晅偗傞*/
if(data < 0) {
string[0] = '-';
data = data * -1;
} else {
string[0] = ' ';
}
/*data傪暥帤楍偵曄姺偡傞*/
bitptn = 10000;
for(i = 1; i < 6; i++) {
j = data / bitptn;
string[i] = '0' + j;
data = data - bitptn * j;
bitptn = bitptn / 10;
}
/*堄枴偺側偄僛儘傪僗儁乕僗偲抲偒姺偊傞丂椺丂00010 仺丂10*/
for(i = 1; i < 5; i++) {
if(string[i] == '0') string[i] = ' ';
else break;
}
/*暥帤楍偺廔傢傝偺埵抲偵侽傪僙僢僩*/
string[6] = 0;
/*暥帤楍傪僞乕儈僫儖夋柺偵昞帵偡傞*/
sci_print_string(string);
return;
}
|
sio1.cpp
#include "mbed.h"
#include "pen4.h"
/*************************************************/
/*俹俠偐傜庴偗庢偭偨僐儅儞僪偵増偭偰捠怣傪峴偆 */
/*堷悢丗SIO峔憿懱傊偺億僀儞僞 */
/*丂丂丂SERVO_DATA峔憿懱傊偺億僀儞僞 */
/*曉抣丗側偟 */
/*************************************************/
void sio_comm1(struct SIO *sio, struct SERVO_DATA *servo_data)
{
unsigned char i, j;
/*俼俠僒乕儃偺惂屼怣崋丂弌椡俷俶乛俷俥俥柦椷庴怣*/
if(sio->command == 'A') {
/*庴怣弨旛姰椆*/
sci_write_char(sio->command);
/*僗僀僢僠僨乕僞庴怣*/
servo_data->switch_signal = sci_read_char_wait();
}
/*俼俠僒乕儃偺僥僗僩梡弌椡抣庴怣*/
if(sio->command == 'B') {
/*庴怣弨旛姰椆*/
sci_write_char(sio->command);
/*弌椡抣僨乕僞庴怣*/
for(j = 0; j < 3; j++) {
for(i = 0; i < 4; i++) {
servo_data->data_test[i][j] = sci_read_uint(); /*庤懌崢(0乣11斣) */
}
}
servo_data->data_test[0][3] = sci_read_uint(); /*庱(12斣) */
servo_data->data_test[1][3] = sci_read_uint(); /*僥僗僩抂巕(13斣) */
}
}
|
17.09.18
杮偺婰帠乽侾俋乣俀俁擔栚乿傊偺捛壛
17.09.18
杮偺婰帠乽俀係擔栚乿傊偺捛壛
17.10.01
杮偺婰帠乽俀俆乣俀俇擔栚乿傊偺捛壛
17.10.01
杮偺婰帠乽俀俈擔栚乿傊偺捛壛
僕儍僀儘乮偲壛懍搙僙儞僒乯偺曄峏
P323,P324曈傝偺曄峏偵側傝傑偡丅崱擔尰嵼PG-03傕擖庤壜擻偱偡偑丄PG-03(侾幉)偺抣抜偺敿暘偔傜偄偱
俁幉僕儍僀儘偲俁幉壛懍搙僙儞僒乕偑攦偊傞偺偱丄偦偪傜偵曄峏偟傑偟偨丅偙偺岺掱偱傑偲傔偰庢晅嶌嬈傪偡傞偲
庤娫偑尭傝傑偡丅
偦傟偧傟偺僙儞僒僉僢僩偺昳柤偼埲壓偺捠傝偱丄椉曽偲傕廐寧揹巕偺僉僢僩偱偡丅
- 僕儍僀儘
宆斣丗AE-L3GD20
壙奿丗\750-
- 壛懍搙僙儞僒
宆斣丗AE-LIS3DH
壙奿丗\600-
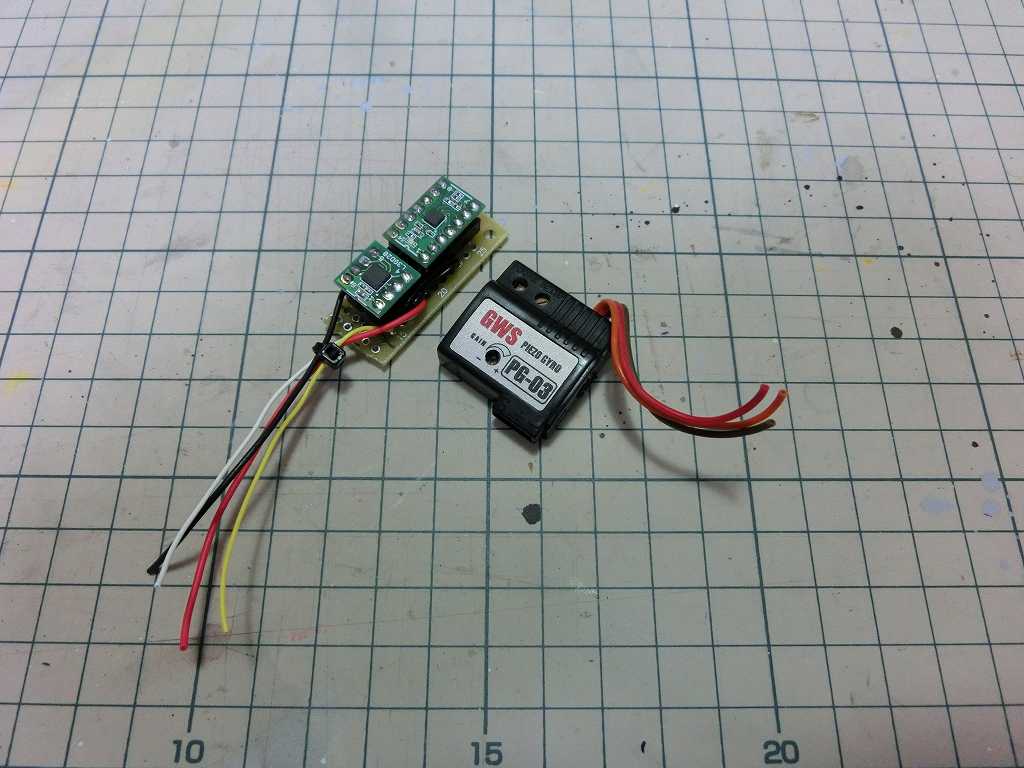
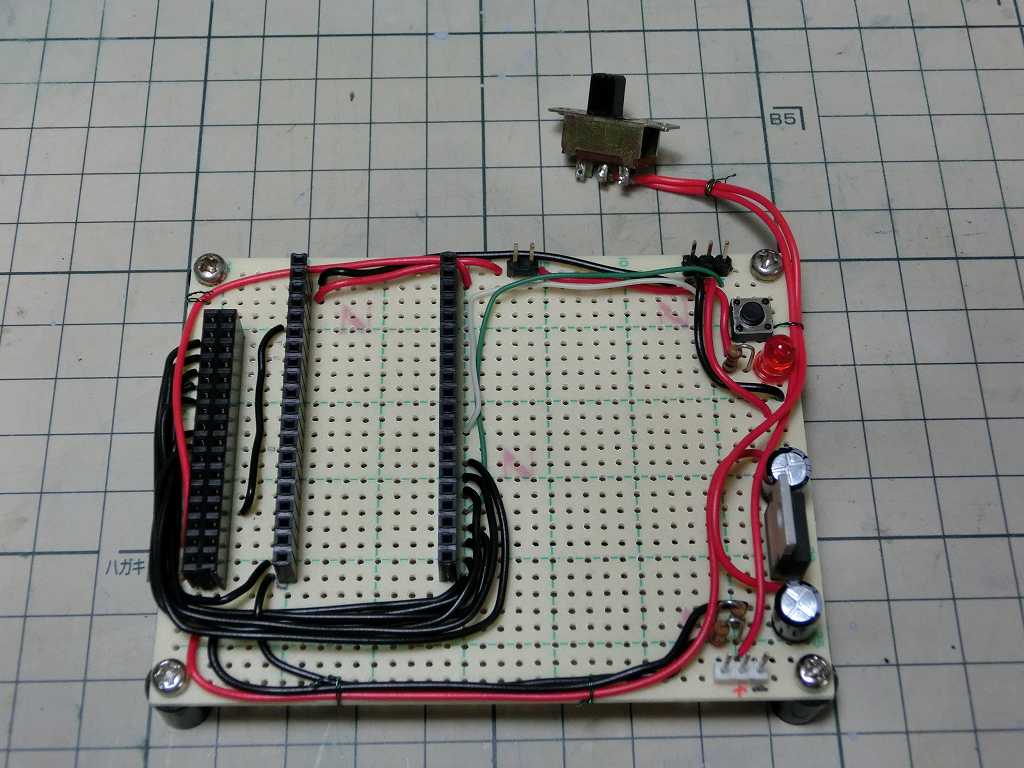
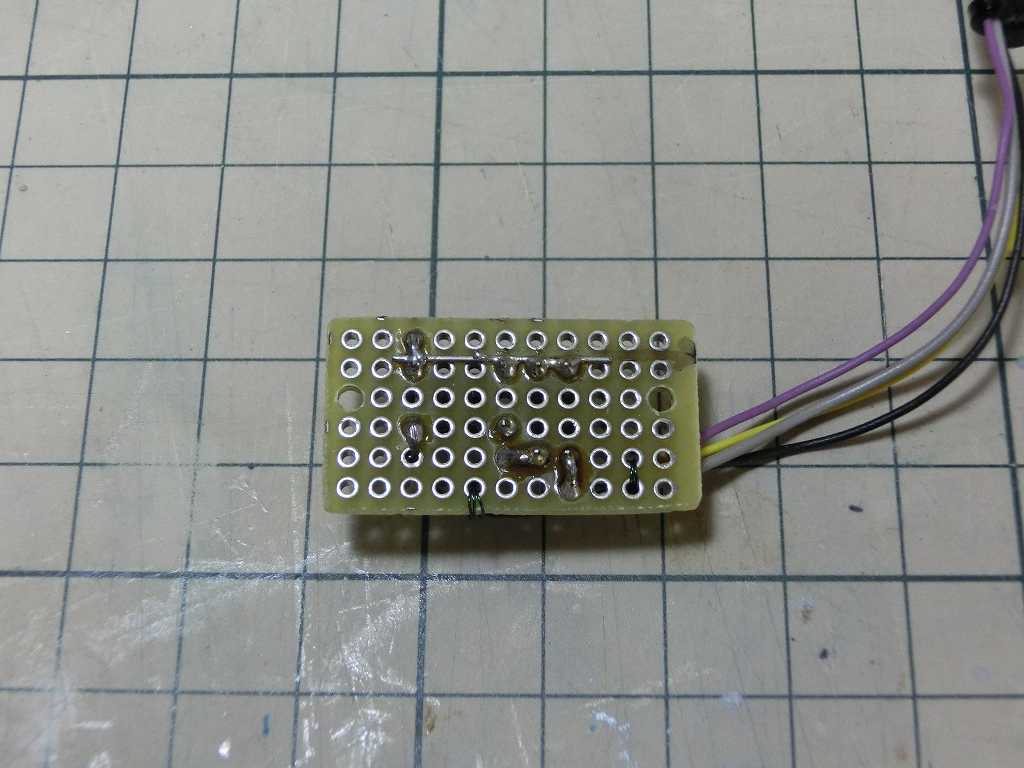
怴媽斾妑
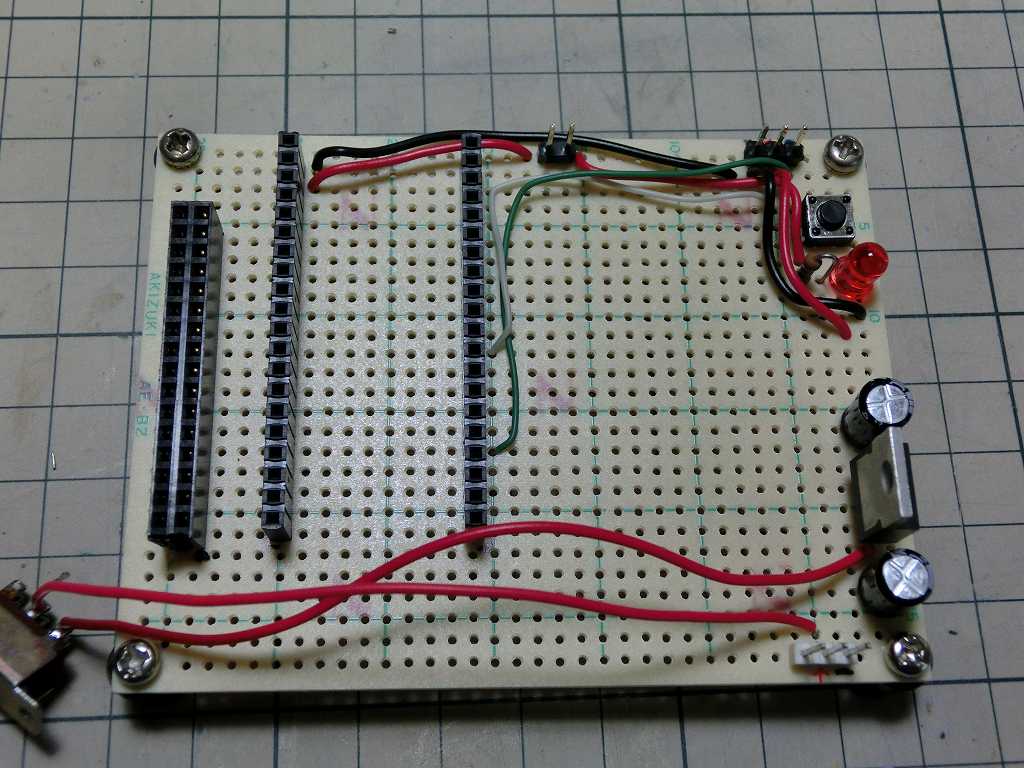
嵍懁偺婎斅偑椉僙儞僒傪庢傝晅偗偨儌僲偱偡丅
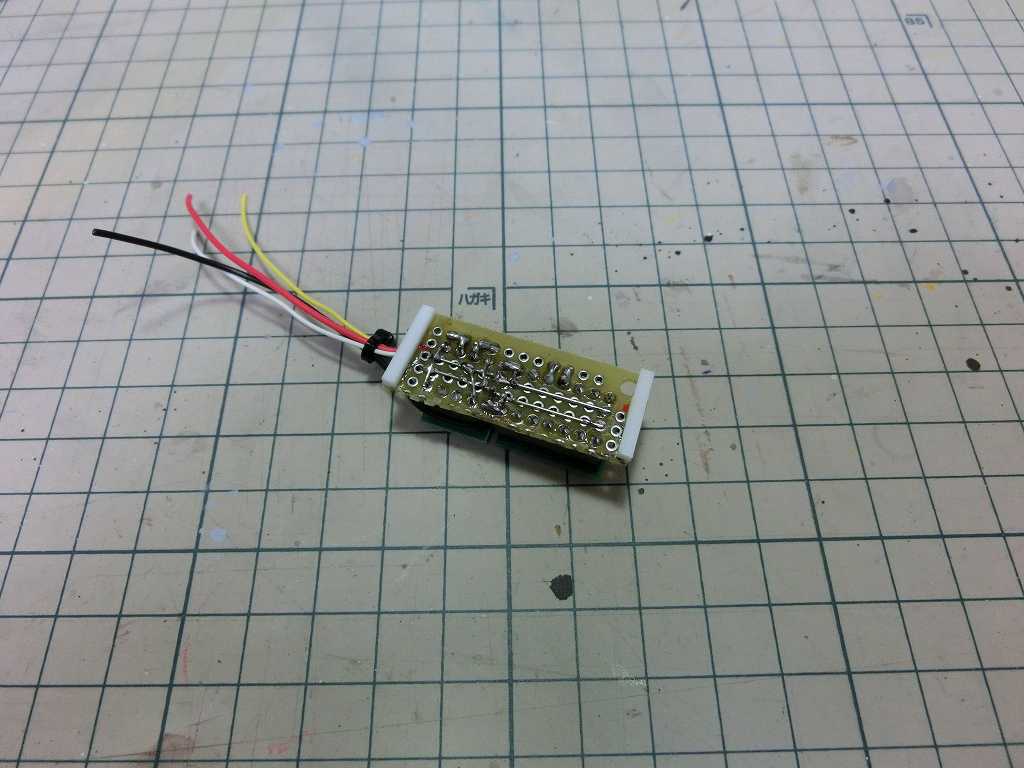
婎斅棤懁
婎斅偺抂偵丄俀倣倣妏僾儔朹傪揬傝晅偗偰偁傝傑偡丅偙偙偵椉柺僥乕僾傪挘傝晅偗偰丄婎斅棤柺傪僼儗乕儉偐傜
2mm晜偐偣偰庢傝晅偗傑偡丅
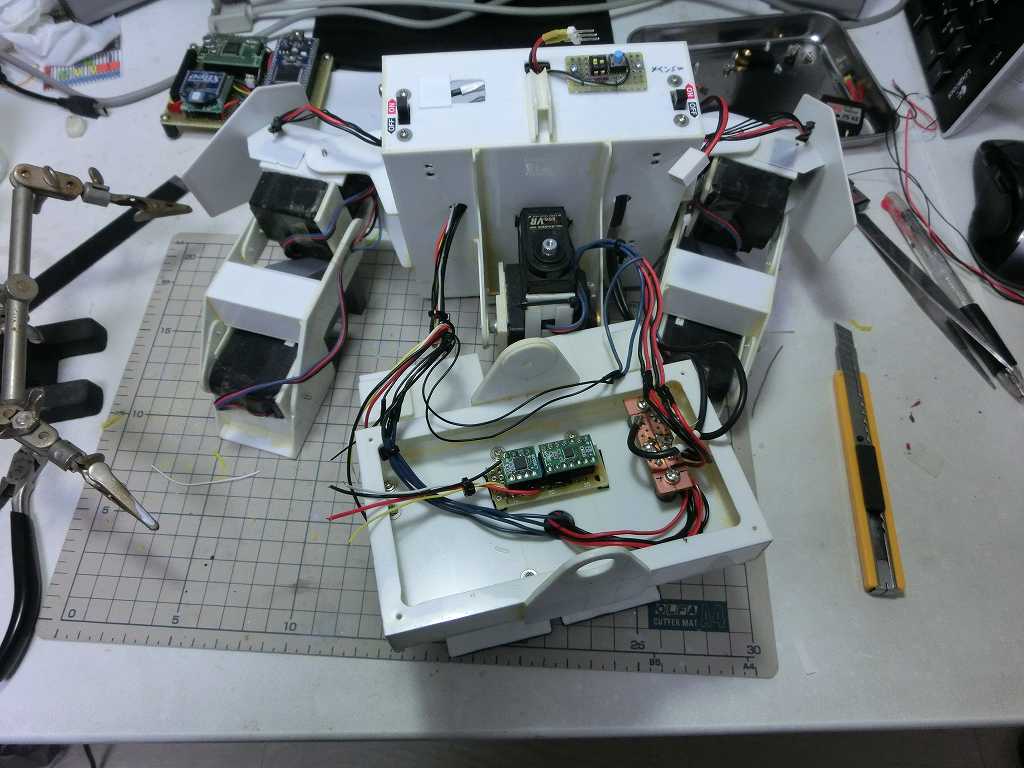
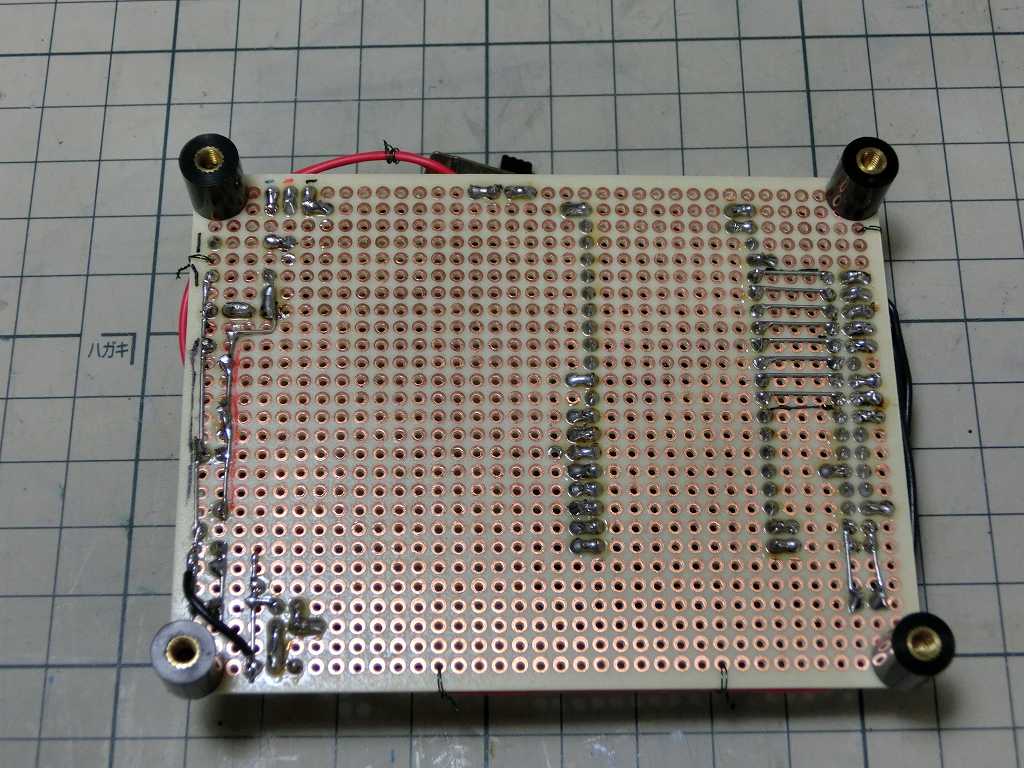
庢傝晅偗忬懺
婎斅偺抂偵丄俀倣倣妏僾儔朹傪揬傝晅偗偰偁傝傑偡丅偙偙偵椉柺僥乕僾傪挘傝晅偗偰丄婎斅棤柺傪僼儗乕儉偐傜
2mm晜偐偣偰庢傝晅偗傑偡丅
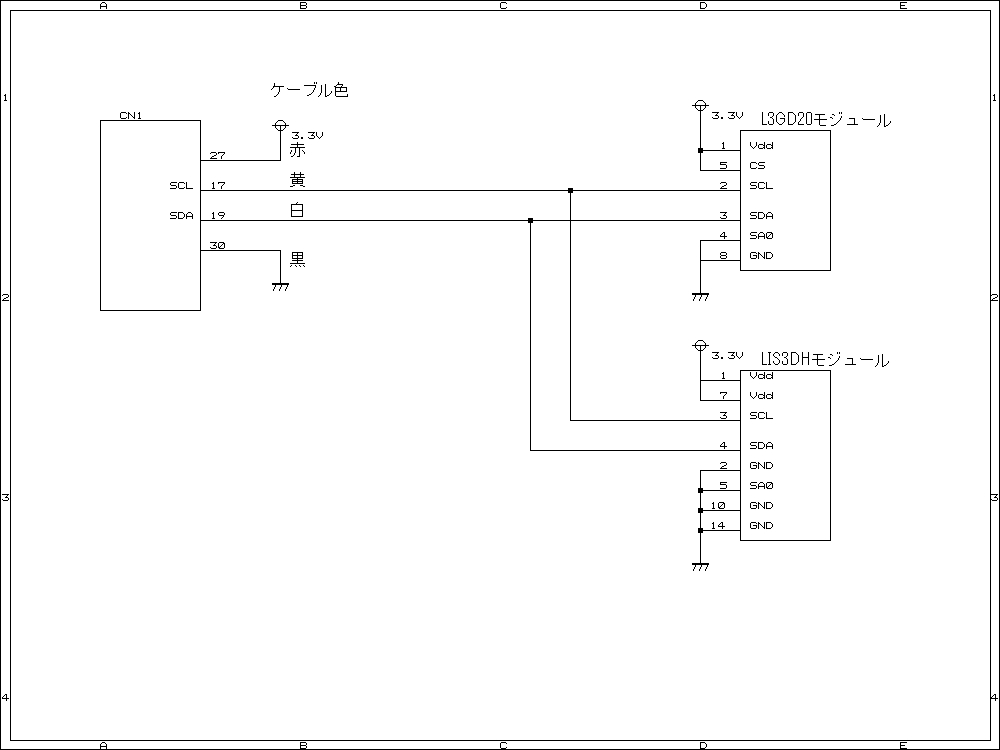
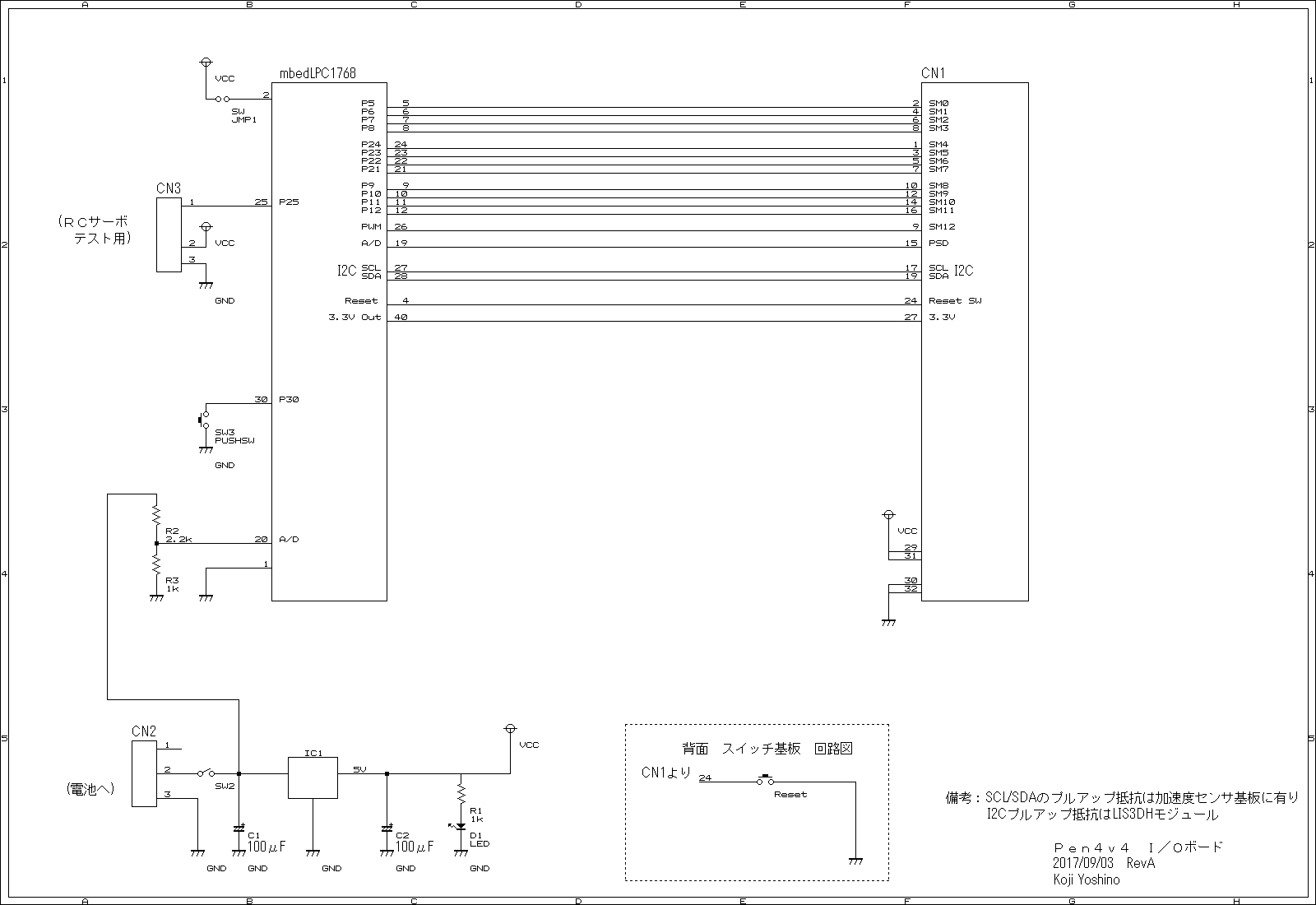
夞楬恾
杮嶌椺偱偼丄捠忢I2C偺儔僀儞偵庢傝晅偗傞僾儖傾僢僾掞峈偵偮偄偰丄AE-LIS3DH撪偵偁傞僾儖傾僢僾掞峈
傪棙梡偟偰偄傑偡丅偦偺偨傔杮夞楬恾偵偼彂偄偰偁傝傑偣傫偺偱拲堄偟偰偔偩偝偄丅
17.10.01
杮偺婰帠乽俀俉擔栚乿傊偺捛壛
17.10.01
杮偺婰帠乽俀俋擔栚乿傊偺捛壛
17.10.09
杮偺婰帠乽俁侽擔栚乿傊偺捛壛
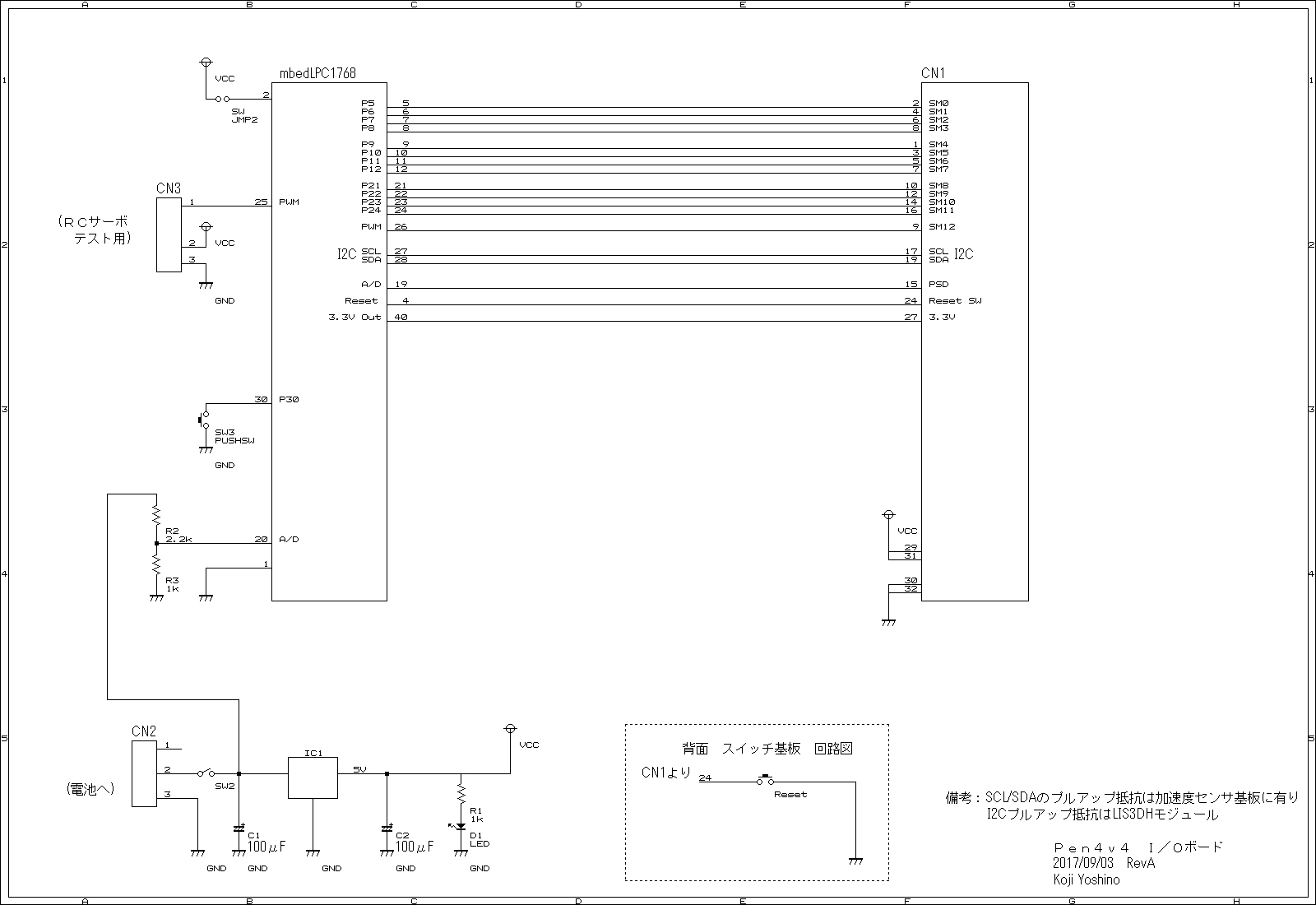
pen4(儅僀僐儞梡僾儘僌儔儉)
僾儘僌儔儉偺棳傟傗峔惉偼曄偊偢丄儅僀僐儞偺僴乕僪僂僃傾偵娭傢傞晹暘傪彂偒姺偊傑偟偨丅
僜乕僗僐乕僪偼丄偁偲偱傑偲傔偰傾僢僾偡傞偙偲偵偟傑偡丅
pen4_vb(僷僜僐儞梡倁俛惢僾儘僌儔儉)
侾俈擔栚偺偲偙傠偱曄峏偟偨丄俹倂俵僷儖僗暆偵娭偡傞悢抣偺曄峏偵壛偊偰丄僥僉僗僩儃僢僋僗偵僙僢僩偡傞
悢抣傕俹倂俵僷儖僗暆偵娭傢傞偺偱曄偊傑偟偨丅
曋棙婡擻丗儕僙僢僩僗僀僢僠偺堷偒弌偟
17.10.09
杮偺婰帠乽俁侾擔栚乿傊偺捛壛
挷惍嶌嬈
揹抮揹埑偺僞乕儈僫儖僜僼僩傊偺昞帵
P363偺嘆偲偟偰捛壛偟偨晹暘偺敳悎偱偡丅應掕儗儞僕曄峏傪斀塮偟偰幃傪曄偊傑偟偨丅
sio1.cpp傛傝敳悎
//Battery梡傾僫儘僌擖椡
AnalogIn battery(p20);
|
/*揹抮巆検昞帵*/
if(sio->command == '8') {
x = battery * 3.3;
y = x / (1.0 / (1.0 + 2.2));
/*僞乕儈僫儖偵揹埑抣傪昞帵偡傞*/
printf("Battery Input = %4.1f V\n", y);
}
|
17.10.09
杮偺婰帠乽俁俀擔栚乿傊偺捛壛
俼俠僒乕儃偺偺摦偒傪僗儉乕僘偵偡傞偨傔偺僾儘僌儔儉偵偮偄偰偼丄儅僀僐儞偺婡庬偵娭傢傜側偄寁嶼側偺偱丄
婎杮揑偵杮偺偲偍傝偵僾儘僌儔儈儞僌傪恑傔傑偡丅
17.10.15
杮偺婰帠乽俁俁乣俁俈擔栚乿傊偺捛壛
pen4_vc偼丄俹俠偺拞偱姰寢偡傞僾儘僌儔儉偺偨傔丄摿偵曄傢傞偲偙傠偼偁傝傑偣傫丅
偟偄偰偄偊偽娭愡僷儔儊乕僞偺應掕抣偑曄傢傞偺傒偱偡丅
娭愡僷儔儊乕僞僼傽僀儖丒僒儞僾儖
17.10.15
杮偺婰帠乽俁俉擔栚乿傊偺捛壛
僆僼儔僀儞寁嶼儌乕僔儑儞僨乕僞偺婰壇僄儕傾偵偮偄偰丄LPC1768偺儊儌儕乕偺傾僪儗僗傪捈愙巜掕偣偢偵丄曄悢偲偟偰
掕媊偟偨応強傪巊偆曽幃偵曄峏偟傑偟偨丅傑偨丄LPC1768偺unsigned int偼係僶僀僩偱丄偦偺傑傑偵偡傞偲RAM偑懌傝側偔
側偭偰偟傑偆偺偱丄尦偺H8梡僾儘僌儔儉偲摨偠2僶僀僩偲側傞傛偆丄儌乕僔儑儞僨乕僞偺婰壇僄儕傾偵娭偡傞曄悢偺掕媊傪
unsigned short 偵曄偊傑偟偨丅
17.10.15
杮偺婰帠乽俁俋乣係俁擔栚乿傊偺捛壛
偙偺嬫娫傕丄俹俠偺拞偱姰寢偡傞僾儘僌儔儉偵娭偡傞嶌嬈偺偨傔丄摿偵曄傢傞偲偙傠偼偁傝傑偣傫丅
17.10.22
杮偺婰帠乽係俁擔栚乿傊偺捛壛
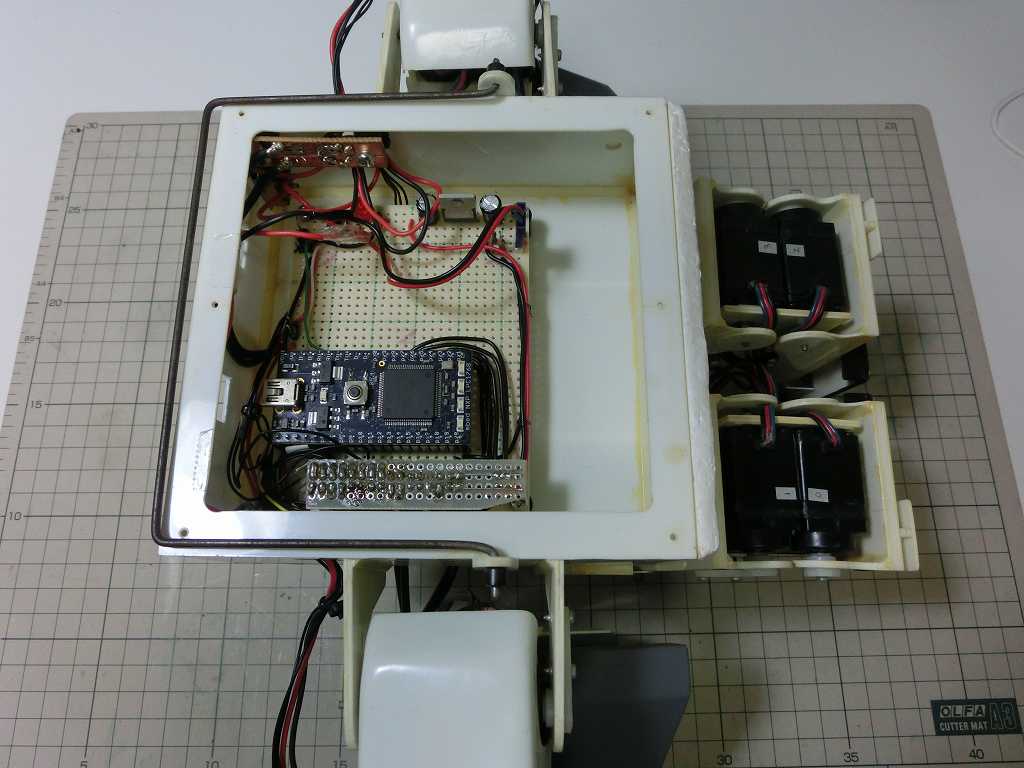
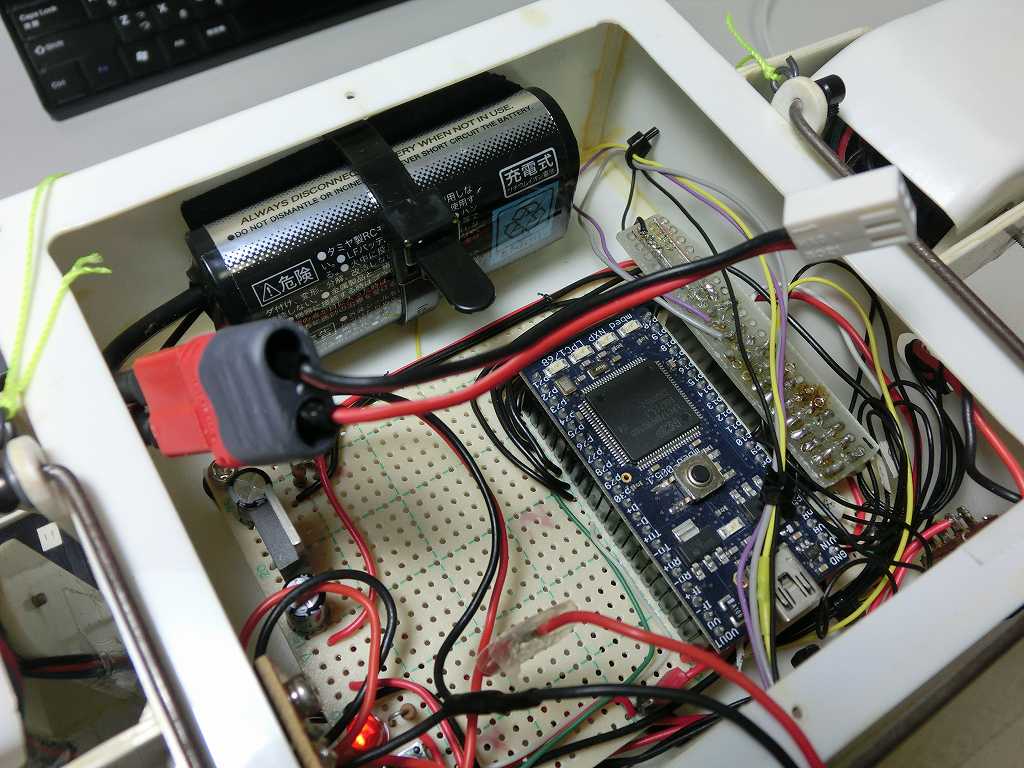
儘儃僢僩傪摦偐偟偰摦嶌傪尒傛偆偲偟偨偲偙傠丄摦偒傑偣傫偱偟偨丅偦偙偱丄捛壛偟偨晹暘偵僥僗僩梡偺僐乕僪傪
擖傟偰挷傋偰傒偨偲偙傠丄儊儌儕乕晄懌偺偨傔儌乕僔儑儞僨乕僞傪惓偟偔妋曐偡傞偙偲偑弌棃偰偄側偄偨傔偲暘偐傝傑偟偨丅
乽LPC1768偵偼RAM偑64KB晅偄偰偍傝丄AKI-H8/3067偺攞偁傞偐傜梋桾偑偁傞偐丒丒丒乿偲巚偭偰偄傑偟偨偑丄娙扨偵挷傋偰傒傞偲
64KB偺偆偪32KB埲忋僄儕傾傪mbed偵梊栺偝傟偰偄傞偙偲偑暘偐傝傑偟偨丅
僔僗僥儉梊栺僄儕傾傪揮梡偟偰偟傑偆偲丄屻乆僐儞僷僀儔偑僶乕僕儑儞傾僢僾偟偨帪側偳偵摦偐側偔側偭偨傝摍丄
巟忈偑偱傞偙偲偑峫偊傜傟傞偺偱丄偙偙偼偲傝偁偊偢儊儌儕乕偑懌傝傞暘偩偗儌乕僔儑儞僨乕僞傪惗惉偟丄儘儃僢僩傪
摦偐偡傛偆偵惂尷偡傞偵棷傔傑偟偨丅
杮偺婰帠偲懳斾偝偣側偑傜惢嶌傪恑傔傞偺偼丄儘儃僢僩偺婎杮晹暘偑姰惉偡傞係俆擔栚傑偱偲峫偊偰偍傝丄巆傝傕
偁偲彮偟側偺偱丄偦偙傑偱恑傔偨偺屻偵暿搑専摙偡傞帠偵偟傑偟偨丅
埬偲偟偰偼丄Pen4 Ver3偱嵦梡偟偨俬乛俷儃乕僪忋偵捛壛偟偨SD僇乕僪偵儌乕僔儑儞僨乕僞傪婰榐偡傞曽朄偲丄摦嶌拞偼
桳慄偱俹俠偐傜憲傞曽朄傪徯夘偟傛偆偐側乣偲専摙偟偰偄傑偡丅
17.10.22
杮偺婰帠乽係係擔栚乿傊偺捛壛
17.10.22
杮偺婰帠乽係俆擔栚乿傊偺捛壛
僕儍僀儘偺僼傿乕僪僶僢僋僎僀儞偺抣傪0.4乣0.55掱搙偲偡傞埲奜偼摿偵曄峏偁傝傑偣傫丅
17.10.23
傑偲傔
17.10.29
揹抮偺昡壙
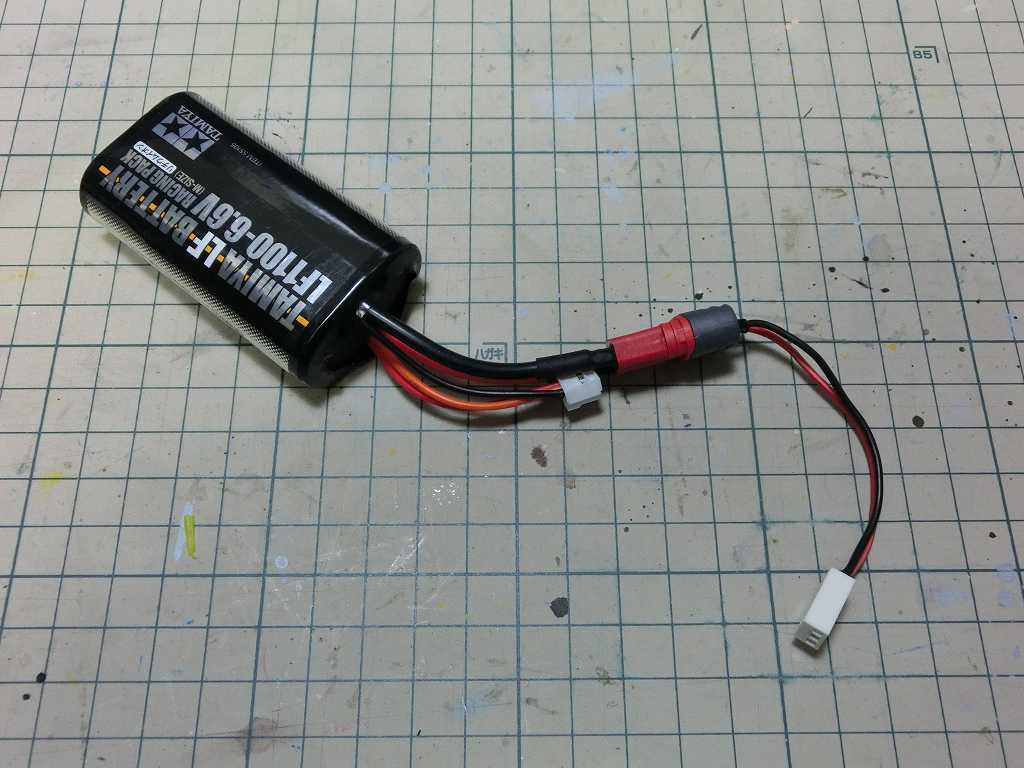
嵟嬤丠儔僕僐儞梡傗儌僨儖僈儞梡偲偟偰庤偵擖傝傗偡偄儕僠僂儉僀僆儞揹抮偺堦庬偺Li-Fe揹抮偐傜丄
俹倕値係崋偵巊偊偦偆側揹抮傪俀偮攦偭偰傒傑偟偨丅
曅曽偼掕奿6.6V 1100mAh偱尦偺揹抮偲岎姺壜擻偦偆側傕偺傪慖傃傑偟偨丅傕偆曅曽偼掕奿9.9V900mAh
偱丄戝偒偝揑偵偼尦偺揹抮偵嬤偄偱偡偑丄DC-DC僐儞僶乕僞傪嫴傫偱揹埑傪壓偘偰巊偆昁梫偑偁傞婡庬偱偡丅
搵嵹弨旛偺戞堦曕偲偟偰丄攦偆慜偵悺朄偼挷傋偰偁傝傑偡偑丄偳傫側姶偠偐幚嵺嵹偣偰傒傑偟偨丅

戝偒偝斾妑偺幨恀偱偡丅嶲峫偵扨3宆僄僱儖乕僾傕抲偄偰傒傑偟偨丅

堦弿偵攦偭偨廩揹婍偱偡丅偄傠偄傠側庬椶偵懳墳偟偰偄傑偡丅
嵹偣偰傒偨偲偙傠偱偡丅栤戣側偔廂傑傝傑偟偨丅
戝偒偝偵娭偟偰丄尒崬傒偳偍傝偱偁傞偙偲偑妋擣偱偒傑偟偨丅
17.11.11
儌乕僔儑儞僨乕僞梡儊儌儕乕僄儕傾偺晄懌懳嶔
愭弎偺偲偍傝丄係俁擔栚偺偲偙傠偱枹抦偺惂栺偲尵偄傑偡偐丄巇條偵堷偭偐偐偭偰偟傑偭偨條偱丄僾儘僌儔儉偑摦偐側偔
側偭偰偟傑偄傑偟偨丅儌乕僔儑儞僨乕僞傪尭傜偣偽摦偔偙偲偼暘偐傝傑偟偨偺偱丄偲傝偁偊偢慁夞儌乕僔儑儞傪彍偄偨宍偱係俆擔栚傑偱
恑傔傑偟偨丅
偟偐偟偦偺屻丄儌乕僔儑儞僨乕僞梡僄儕傾偺庢傝曽傪曄偊偨偲偙傠摦偔傛偆偵側傝傑偟偨偺偱丄偙偺僾儘僌儔儉偵偮偄偰偼乽係係擔栚偺僾儘僌儔儉
偺僶乕僕儑儞俀乿偲偟偰岞奐偡傞帠偲偟傑偟偨丅乮偙傟傑偱偺僜乕僗僐乕僪傕丄偙傟偼偙傟偱嶲峫偵側傞偐偲巚偄丄巆偟偰偍偔偙偲偵偟傑偟偨丅乯
偪側傒偵壗傪曄偊偨偐偲尵偄傑偡偲丄尦偼俼俠僒乕儃偵弌椡偡傞僨乕僞偵偮偄偰丄儌乕僔儑儞僨乕僞傪婰壇偟偰偄傞僄儕傾傊偺
億僀儞僞傪偢傜偟偰娫愙嶲徠偵傛傝庢傝弌偡曽幃傪嵦梡偟偰偄傑偟偨丅偙偺曽幃偼寁嶼忋偱偼傑偩儊儌儕乕偵梋桾偑偁傞偼偢
側偺偵丄僨乕僞傪憹傗偟偰備偔偲摥偐側偔偲偄偆尰徾偵弌夛偄傑偟偨丅
尦偼俫俉偺張棟擻椡晄懌傪曗偆栚揑偱庢偭偰偄偨曽朄側偺偱丄儅僀僐儞戙懼偊偱弌偨梋桾傪棙梡偟丄捈愙嶲徠
偵曄偊偰傒偨偲偙傠丄偙偪傜偼偆傑偔摥偒傑偟偨丅
2017/11/11斉僜乕僗僐乕僪丗僟僂儞儘乕僪
偮偄偱偺曄峏
- 偙傟傕儅僀僐儞戙懼偊偱惗偠偨梋桾偵傛傞傕偺偱偡偑丄俹俠偲儅僀僐儞偺娫偺捠怣懍搙愝掕傪19200bps偐傜115200bps偵曄峏偟傑偟偨丅
- 偣偭偐偔俁幉僕儍僀儘偵曄峏偟偰偁傞偺偱丄僺僢僠曽岦偵傕僕儍僀儘偺僼傿乕僪僶僢僋傪偐偗傞傛偆偵婡擻捛壛偟傑偟偨丅
17.11.12
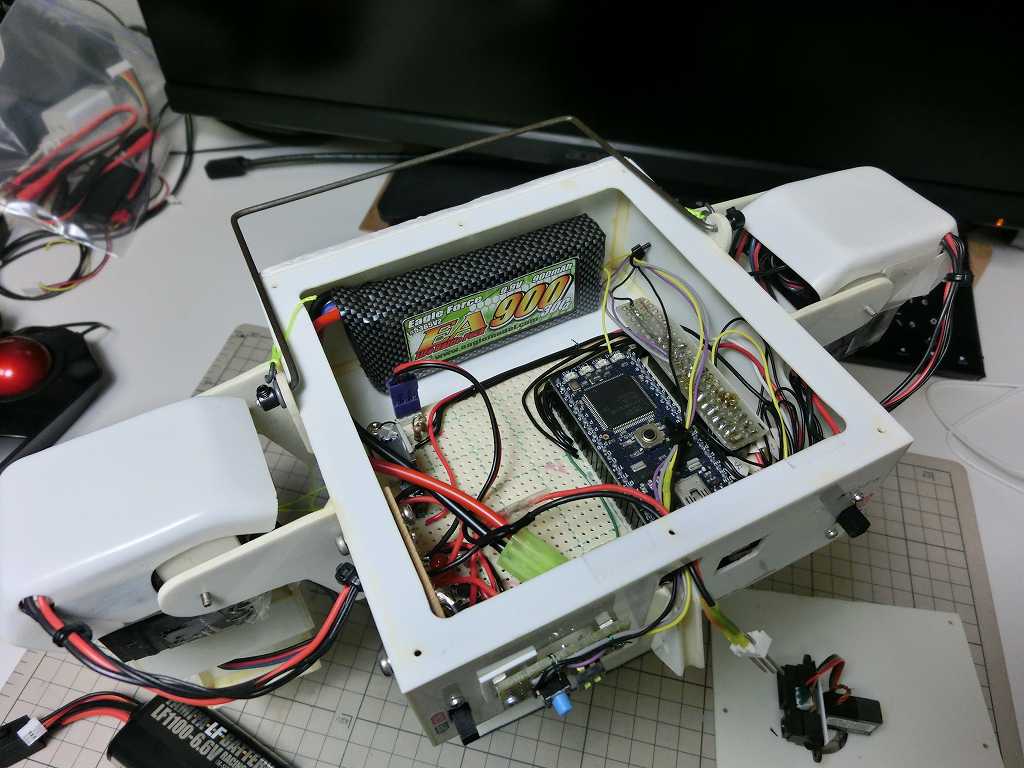
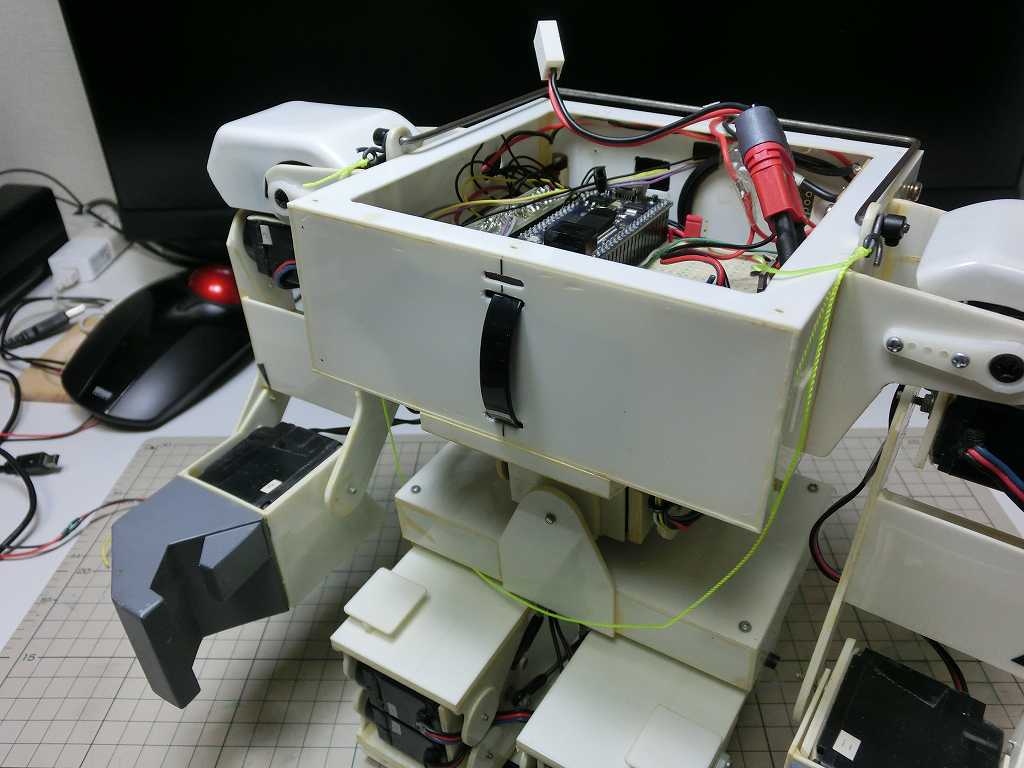
6.6V 1100mAh Li-Fe僶僢僥儕乕偺搵嵹
20.05.06
2020/05/06尰嵼偺僷僜僐儞梡摑崌奐敪娐嫬乮Visual Studio 2019乯揔梡挷嵏
撉幰偺曽偐傜pen4_vc偺僐儞僷僀儖僄儔乕偺夞旔曽朄偵娭偡傞幙栤偑偁傝丄挷傋偨偲偙傠丄VC++偺僨僼僅儖僩愝掕偵
曄峏偑偁偭偨偙偲傪抦傝傑偟偨丅婐偟偄偙偲偵丄崱偱傕怴偨偵杮彂傪庤偵庢偭偰妶梡偟偰偄偨偩偔曽偑偄傜偭偟傖傞條偱偡偺偱丄
僒億乕僩儁乕僕偵忣曬傪壛偊傞帠偲偟傑偟偨丅
嬶懱揑側僄儔乕撪梕偲偟偰偼乽char偱愰尵偟偨僋儔僗偺堷悢偲偟偰const char傪搉偟偰偼偄偗側偄乿偲偄偆傕偺偱偟偨丅
懳墳嶔偺嶲峫偵Microsoft偺Visual Studio偺僪僉儏儊儞僩儁乕僕側偳偱偪傚偭偲撉傫偱傒偨偲偙傠丄C++偺昗弨偺峏怴偵崌傢偣偰丄
僐儞僷僀儖帪偺僄儔乕僠僃僢僋偑尩偟偔側偭偨偲偄偆偙偲偺條偱偟偨丅偦偙偱埲壓傪帋偟偰傒傑偟偨丅
- 慺捈偵堷悢偺愰尵傪const char偵曄峏偡傞丅
- 僐儞僷僀儖僆僾僔儑儞偵丄廬棃捠傝偙偺僄儔乕傪僠僃僢僋偟側偄傛偆偵偡傞僗僀僢僠傪懌偡丅
嫵嵽揑側娤揰偐傜偼慜幰偺乽側傞傋偔怴偟偄C++尵岅偺昗弨偵増偆宍偵捈偡乿偲偄偆曽偑朷傑偟偄婥傕偟傑偟偨偑丄
婰帠偲僒億乕僩儁乕僕偺僜乕僗僐乕僪偵堘偄偑偁傞傕偺崿棎偺尦偵側傞偲峫偊偨偺偱丄屻幰偺曽傪僒億乕僩儁乕僕偵
徯夘偡傞偙偲偲偟傑偟偨丅
栠傞
儂乕儉傊栠傞



{kind=link}
{kind=link}
{kind=link}