毎日コミュニケーションズ刊 吉野耕司 著 「60日でできる!二足歩行ロボット自作入門」
で例として製作したロボット「Pen4」について、書籍の中での完成状態を起点とした
追加の製作や試行錯誤の記録を記した製作日誌です。
うまくいった試行については、製作記事のページとしてまとめる予定です。
新しい物から古い物の順で書いています。
14.03.23
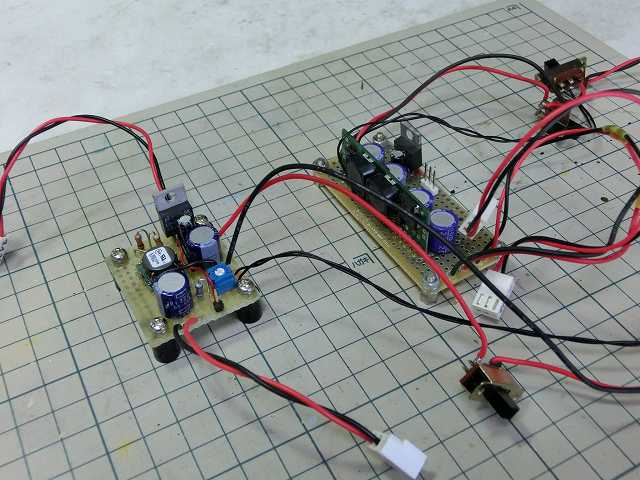
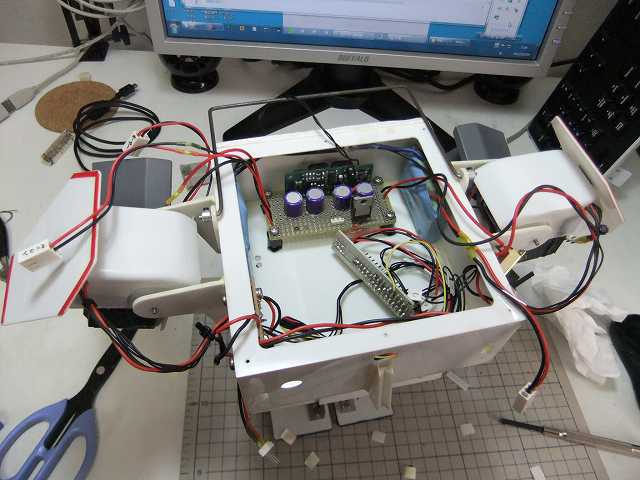
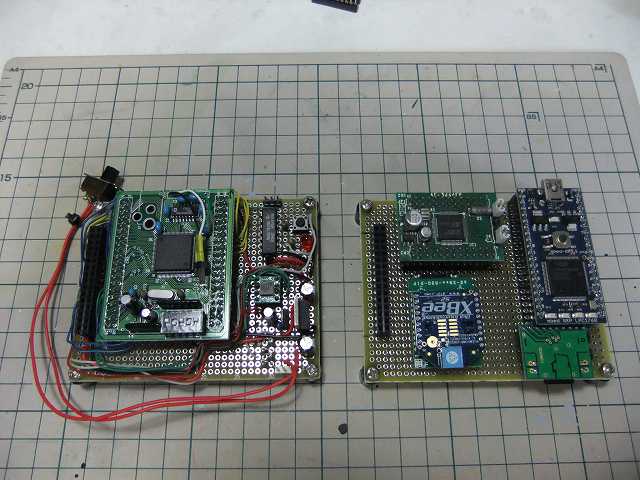
電源ユニットの更新
最近、秋月の通販で購入した表面実装DC-DCコンバータ 村田製作所 OKL-T/6-W12N-Cを使ってみるため、Pen4にも
積める形の電源ユニットを作りました。

右がこれまでの電源ユニットで左が今回作った電源ユニットです。小型・軽量化になりました。
RCサーボに供給する動力系にOKL-T/6-W12N-Cを使い、マイコン等に供給する制御系は、更新前の電源ユニットと
同じ3端子レギュレータ LM2940CT-5.0を使いました。

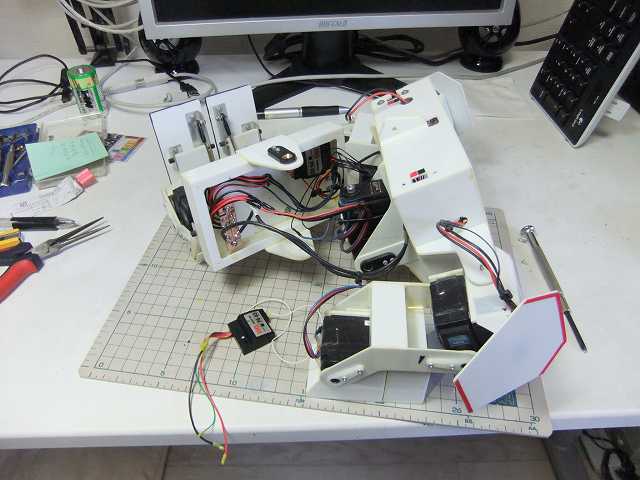
搭載するとこんな感じです。
コンデンサはデータシートに載っていた回路図と同じにしたいところでしたが、コンデンサだけ通販すると
送料がもったいない気がしたので、別のDC-DCコンバータ様にストックしてあった10V 220μFのOS-CONを付けました。
ロボットを動かしてみた感じ、特に問題無さそうでした。DC-DCコンバータの出力が5V4Aから5V6Aにアップした
せいか、若干モーターのトルクがアップして、膝サーボの定常偏差が少なくなったようでした。
14.03.16
ジャイロ(角速度センサ)などの更新−ソフト
配線ミスなど無くちゃんと動くか、単純に測定値を読み取るテストプログラムで動作確認をした後、
今回はジャイロL3GD20の方を歩行時のフィードバックループに組み込みました。
(元々PG-03を読みに行くコードがあった所に、L3GD20の測定値を読むコードを入れました。)
このチップには設定できる項目がたくさんありますが、一通りマニュアルに目を通したのち、とりあえずCTRL_REG1=0x0Fを
セットし、各軸の測定を有効にした他はデフォルトのまま行けそうろ判断したので、そのまま使ってみました。
特に気にした設定項目は、1秒間に何回測定が行われ、読み出し可能かと、測定のフルスケールでそれぞれ以下の通りとしました。
Digital output data rate: 95Hz(たぶんこれがサンプリングレートだろう・・・と思います。)
Full scale: +-250 dps(degree per second)
Digital output data rateは、制御サイクルの50Hzより速いからOKとしました。Full scaleは、更新前のPG-03に
使われているジャイロスター EN-03?(いくつか手元にあるPG-03のケースを開けてみたら、ジャイロの
種類がいくつかありました。ジャイロスターのバージョン違いみたいです。たぶん、型番はEN-03であっていると思います)
の測定レンジが+-300dpsなので、
それに近い+-250dps(デフォルト)としました。
マニュアルを見ると特に内蔵のローパスフィルタ&ハイパスフィルタ等、Pen4にもっと適した設定が出来そうな感じがするので、
おいおい試していこうと思っています。
こんな感じで制御ソフトに組み込んで、適当にフィードバックゲインを調整したところ、ちょっと歩かせた感じでは
以前と同じように安定化されて歩けました。
14.03.02
ジャイロ(角速度センサ)などの更新−ハード
13.10.27
足裏のタッチセンサで測定
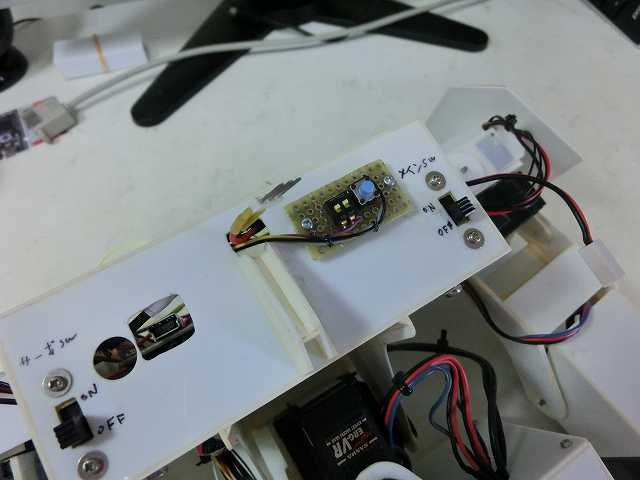
10/14の更新の時に付けた圧力センサで歩行中の状態を測定してみました。

測定は写真のように、ロボットはジョイパッドで無線操縦し、測定は別途用意したマイコンで行いました。
10kオームの抵抗とセンサで3.3Vを分圧し、mbedLPC1768のA/D入力で測定しました。
「ON/OFFが分かればよい」というスタンスで回路を組んだので、ノイズの事はとりあえず考えないでやりました。
今後測定の精度を上げたくなった時は、線をシールドするとか、適当なローパスフィルタを入れるとか標準的な対策を
しようと思っています。
サンプリングレートは、なんとなくRCサーボのPWMパルスの周波数と同じ、約50Hzにしてみました。下の
グラフが測定結果です。縦軸が電圧(V)、横軸は時間です。足が上がった時、すなわちセンサがスイッチOFF状態になり、
測定結果が電源電圧の3.3V近くになった状態をトリガとして、5秒間測定しました。
硬くて滑る床にて測定
柔らかくて滑らない床にて測定
こんな感じで硬い床(机の上)と柔らかい床(木目柄のビニールクッションシート)の両方共うまく
測定でしました。硬い床では1歩でだいたいピークが1つでした。柔らかい床は、少し前後に揺れながら
歩いていたことが現れて、1歩に複数回ピークが見えました。いい感じに取れたので、常時使えるように
装備する方向で考えようと思いました。
13.10.14
足裏のタッチセンサ(圧力センサ)
歩行中の足裏の接地の具合を測定して歩行に反映させることを目標に、FSR-402という圧力センサを
試してみる事にしました。ストレインゲージを思い出させる見た目です。今回は足裏の一部に、簡単に
貼りつけ「使えそうか」の確認をしようと思います。
調子が良いようならば、恒久的な装備としてロボット全体の耐久力に合わせた取り付け方で使えるように
しようと考えています。

FSR-402のパッケージ

試しに足裏に貼りつけてみたところ
足裏が接地した時にセンサの中央が押されるように2mmのワッシャを
貼りつけました。スイッチトラベルは0.05mmですが、柔らかい床でも反応するように厚めのものを選びました。
また、その他の部分は高さ調節のため、3mmと2mmを重ねて貼りつけました。厚さはそれぞれ以下の通りです。
- 2mmワッシャ:約0.30mm
- 3mmワッシャ:約0.45mm
- FSR−402:約0.50mm
今日のところは、この足裏の状態で硬くて滑りやすい「机の上」と、柔らかくて滑らない「床の上」で歩行に支障ない
所まで確認しました。
13.09.16
総合テスト・・・荷物運び
ここしばらく、より細かく移動操作をする機能と、腕をリモコンする機能を作ってきたので、組み合わせの
有用さを確認すべく、総合テストとして「腕が届く範囲」まで歩み寄り、簡単な荷物を拾って運べるか・・・試してみました。

基本的な確認が簡単にできればよいので、右手に針金で作ったフックを取付ました。

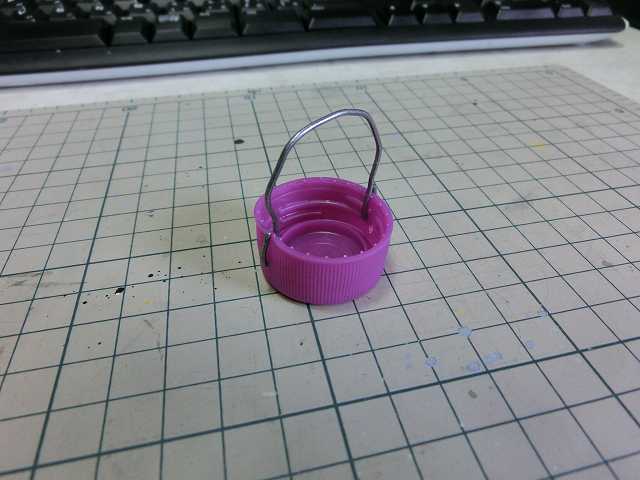
運んでみる対象は、ペットボトルのキャップに、フックと同じ針金で取っ手を付けたものです。
プラモデル用のスプレー缶の上に置いたキャップまで歩いて近づき、フックで持ち上げます。
フックに引っかけてあるキャップを、スプレー缶まで近づいて上に乗せます。
こんな感じで一応出来ました。上半身を大きく揺らしながら歩くので、フックに引っかけてあるものが
吹っ飛んでしまうのではないかと懸念しましたが、意外と平気でした。キャップのハンドリングに意外と
時間がかかっていますが、これについては、けっこう練習の影響が大きく出るな〜と感じました。
ちなみに、ムービーは2回ほど練習した後で撮影しました。
次はカメラからの映像をPCの画面で見ながら同じようなことをやってみて、どんな感じか見て、操縦
方法まで含めて、どういう機能があると効率よく操縦できるのか考えてみようかと思いました。
13.08.25
「頭」的な飾り
やはり「頭」的な物が付いていた方が見栄え・・・というか「ロボット」らしく見えるような
気がするので「頭」的な飾りを作りました。LEDにはまだ配線していませんが、動作モード等を
モニタ出来るようにしようかと考えています。

仮付けしてみたところ

裏から見たところ
13.08.18
腕を任意に動かす機能
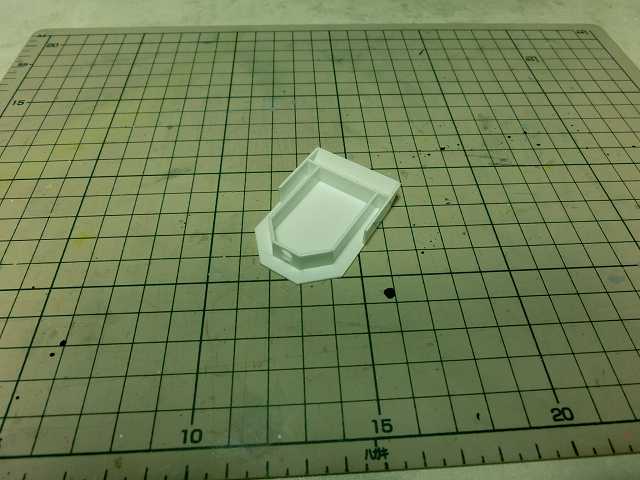
13.07.28のところで言及した「手の位置を任意に動かす機能」を作ってみました。具体的には手先の座標をX,Y,Zで指定して、腕のRCサーボへの
出力値を求める関数と、ジョイパッドの操作でこのXYZ座標を指示する関数を作りました。下の動画はジョイパッドの操作で
霧吹きの上に乗った消しゴムをそーっと落とす様子です。
XYZの座標軸の原点は肩のロール軸のところで、方向は脚の計算に使っている座標軸とおなじです。
そして、ジョイパッドの操作は以下のようになっています。
- 右トリガでアーム操作モードへ移行(アナログのスイッチですがデジタル的に利用)
- 左スティックY,Z軸方向への手先移動
- 右スティックのY方向操作で、X軸方向への手先移動
今後の方向としては、例えば「そのまま手を伸ばしても届かない位置まで指示が動いた場合は自動的に一歩前に出る」といった
機能を実装してみようかと思っています。
任意の方向へ方向転換する機能
13.07.28のところには無かったので、上の動画を撮るついでに撮影しました。
13.08.07
H8用Cコンパイラの稼働確認
VB/VC++の互換性確認
この制作日誌では、本のプロジェクトをVisual Basic 2010 Express EditionとVisual C++ 2010 Express Editionに変換(プロジェクトを
始めて開くときに自動的に変換される)してから製作を進められていますので、メニューの構成やPC自体の操作方法等、本のとおりでない所
を読みかえるだけで製作には使用可能です。
今日時点の最新版は、Windows8のタッチパネル機能や「アプリ」に対応した2012です。調べた所によると、Pen4号用の様なデスクトップ
アプリケーションを作る部分は2010と変わらないようなので、使えるでしょう。
ただ、Windows 8 でも2010は使えるので、本で使っている2005により操作性が近い2010をお勧めします。
13.07.28
操縦性の確認
操縦(移動関係)に関してだいたい機能が揃ったので、ジョイパッドからの操作で思うように
ロボットを誘導できるか、部屋に床にスプレー缶などを置いて、スラロームをしてみたり、周回
してみたりしました。

いちおう可能でしたが、制御ソフトの改良の余地が大きいな〜と思いました。御覧の通り
床スペースが小さい部屋に住んでいて、テストコースも狭い一方、Pen4号は背の高さの
割に横幅が広いのでUNIにはあった「真横に歩ける機能」は復活した方が良い気がしました。
また、こうして具体的にコースを設定して誘導してみたところ、前回更新時に書いた「一歩だけ進む機能」
が意外と便利だったので、当面の間残すことにしました。
任意の方向へ方向転換する機能の追加
Pen4号は予めPCで計算しておいた歩行モーションで歩くため、方向転換についても「予め
用意した旋回モーションの一歩で向きが変わる角度」を単位とした方向転換しか出来ません。
そんなわけで、例えば「ボタンに手が届くところまで移動」のような細かい操縦が困難です。
この辺りを補うため、更新したマイコンの計算パワーを生かし、操縦の途中、ロボット搭載マイコン
で歩行モーションを生成しながら方向転換する機能を追加しました。
操縦操作としては、十字キーの左右を押している間、その場で方向を変え、キーの上を押したら足を
揃え、その後はその方向へ歩けるようになる・・・というものです。
特に問題無くうまくいったので、次は歩幅を任意に変えて一歩ずつ前後進できる機能を追加し「ちょうど手が届く位置
まで容易に移動・位置決めできる」様にする方向でいこうと思っていますが、次の悩みどころは「どういうジョイパッドの
操作で歩幅を指示するか」です。
また、ジョイパッドからの操作で腕を任意に動かす機能も作ってみようかな・・・とも思っています。
リセットスイッチとモード切り替えスイッチの追加
13.06.23
追加したモーションの操縦プログラムへの組み込み
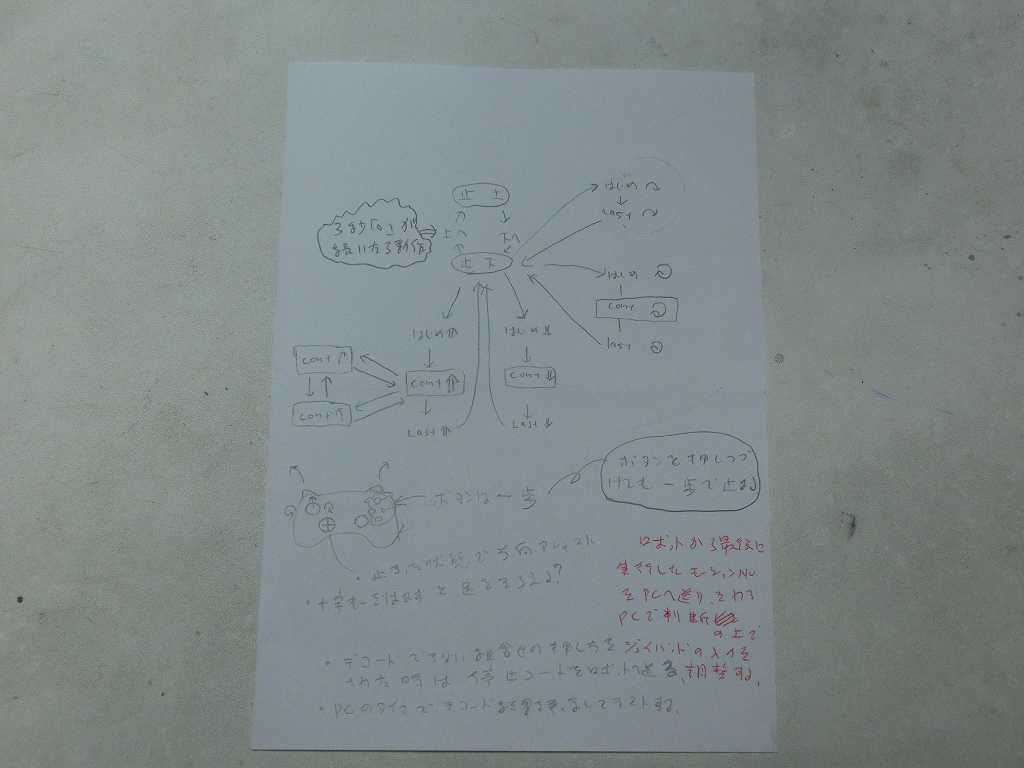
モーション間の状態遷移図とジョイパッドの操作とロボットへコマンドとして送信される数字の
対応表等を整備したのち先週までに追加した旋回率の高い旋回用モーションを操縦プログラムへ組み込みました。
状態遷移図メモ
ジョイパッド(Xbox360用)とのコマンド対応表
「ボタンを押すと一歩だけ歩いて止まる」という機能も作ってみたのですが、特に専用の
機能が無くても一歩だけ進ませる操作に問題なかったので不要な機能でした。
13.06.16
歩行モーションの種類追加
2週間連続で週末に出かけたので、どこまで作ったか思い出しながら、13.05.26の更新で
モーションのつなぎ目がおかしかったことの原因調査から再開しました。
最後に追加したモーションがおかしいものと思い詳細にチェックしましたが特におかしいことは
無かったので、範囲を広げて調べたところ13.05.19のところで作った、モーションデータ等を
PCからロボットに送る通信プログラムで、データの取りこぼしのためモーションデータが欠けている
のを見つけました。
通信プログラムは取りこぼしが起きないように改善済なので、再度全てのモーションデータを送りなおした
ところスムーズに動くように直りました。
モーションそのものがスムーズに直ったところで、改めて旋回率の高いモーションを高速度撮影し、
様子を見てみました。
重心移動のタイミングについて、UniのままよりもPen4号用に適用したモーション生成クラスの改善
を反映した方が良さそうなので、その方向で調整を進める事にしました。
13.05.26
歩行モーションの種類追加
旋回に時間がかかるので(13.04.21の動画のとおり)Uniからより旋回率の高い旋回モーションを生成する
クラスを移植しました。旋回に限らず全ての動作が遅いといえば遅いのですが、前よりも良くなりました。
今日のところは、UniとPen4号の関節の構成の違いに関係するコードを機械的に修正しました。
元々、Pen4号のプログラムはUniのプログラムを清書したようなものなので、とくに考えなくても
今までのモーションときれいに馴染むはずなのですが、歩かせてみるとモーションの切り替え部分に、うまく
つながっていないため「ビクッ」と動く部分があったので、来週以降ゆっくり見直そうと思いました。
13.05.19
mbed版pen4_vcの構成変更
mbed LPC1768がどの程度の速さで計算できるのか、だいたい感覚がつかめた気がするので、ロボット側に
あっても使い勝手が良くない「歩行モーションをまとめて生成する機能」を外し、代わりにPCで生成した
歩行モーションデータのセットをUSB経由で受け取って、SDカードに書き込む機能を付けました。
歩行モーションの種類追加
直進歩行中に、不規則に少し進路が逸れるので、進路修正用として足を前に送り始める時に少し引きずる
様にして抵抗をつける歩行モーションを追加しました。Pen4号の足の軌跡は長円が基本ですが、今回は
下図の様な軌跡を使ってみました。
使い方としては曲がりたい方向の足の軌跡をこれにすると、足が地面を離れる前に前に送り始める
形になるので、進路を変える事が出来ます。(どれくらい進路が変わるかは、同じ軌跡を使っても、
足と床との摩擦係数により変わります・・・)
13.04.21
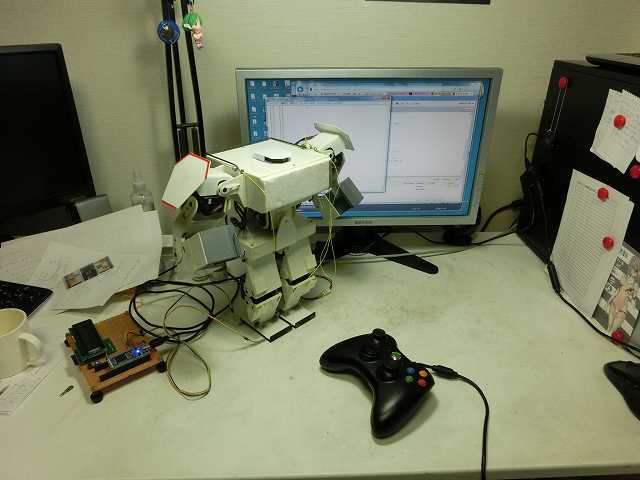
ジョイパッドで操縦
機能的には特に本の完成状態より進んだところはありませんが、前進、後進、左右旋回をジョイパッドから
操縦できるようにプログラムを作りました。はじめはPC側のプログラムを通信のマスターにして作ってみた
のですが、いまひとつまとまらず、ロボットが操作情報を受け取る時に20msecの制御サイクルタイムを
超えてしまい、モーションのつなぎ目でぎくしゃくしてしましました。そこで改めてロボット側をマスターにして
書き直しました。
その他、制御サイクルに収める対策の一つとしてXBeeのボーレートをデフォルトの9600bpsから57600bpsに変えてみました。
仕様の最高速度までまだ余裕があるためか、特に問題無く、ケーブルでつないでいる時並みに安定している感じでした。
歩行モーションデータの調整
足裏が滑らない床で歩かせてみて、Pen4を滑りやすいフローリングの床&机の上で、初めから
遊脚が床に軽く接触させて、安定させるつもりで歩かせていたときには気が付かなかった点について、
高速度撮影も使えるようになり、余計に気になりだしたので、この際歩行モーションを生成するコードに
ついて見直しました。
特に初めの一歩と最後の一歩の計算を直し、ひじを曲げた状態で腕を振って歩くようにしました。
この後は、手で何かを押したり、両腕で抱えたり出来るようにするための細かい位置調整と、
歩行の経路を意図したとおりに辿れるようにする機能などを作ろうと思っています。
13.04.14
歩行モーションの調整
日を改めてプログラムを見直したところ、ジャイロのフィードバックの値を入れている変数のスコープを
勘違いして、測定誤差が蓄積するようになっていることに気が付いたので、そこを直したところ普通に
歩くようになりました。
普通に歩く動画
高速度カメラ
「今度足歩行ロボットの調整をするときに買おう」と思っていたのを思い出し、高速度撮影機能が
付いたカシオのEX-ZR200というコンパクトデジカメを買いました。同じ系統の現行機種EX-ZR1000,EX-ZR400や
ひとつ前のEX-ZR300などと2時間ほど仕様一覧やレビューなどを見比べ「カメラの性能としては差が無さそうだ」
と判断して、安くなっていた旧型機を買いました。
240fpsで撮ってみた動画
どこのタイミングで進路がそれるのかや、支持脚切り替え時に荷重条件が変わるため、膝関節の
定常偏差が変わり、少し腰が浮くところなどが実際に見る事が出来て面白いです。
細かい制御方法の調整結果確認に使えそうで良いと思いました。
ジョイパッドで操縦
XBee経由でジョイパッドの情報を受け取る通信関連のプログラムを書き始めました。以前からラジコンで
操縦することはしていたので、それ以上のもっと細かい事(例えば腕で何か持ち上げて移動させるみたいなこと)
を出来るようにするためにはどうするのがいいか検討中です。
13.04.07
歩行モーションの調整
だいたい準備が整ったので、歩かせてみました。電池やマイコンを変えてバランスが変わったことと、
今住んでいる部屋の床は「柔らかくて滑りにくいビニールに、フローリングの模様を印刷したような
材質」のためか、本の完成状態の時に作った歩行モーションでは数歩で揺れが大きくなり転倒する状態でした。
今週は操縦システム(ジョイパッドの情報をXBee経由でロボットに伝える)のプログラミングでもしようと
思っていたのですが、うまく歩かない状態が気になるので、今の部屋の床で、とりあえず転ばずに歩く
モーションをつくりつつ、ジャイロのフィードバックのゲインの値などを調整しました。
歩行モーション作成途中の動画
まだ動きが変なので、おいおい調整しようと思います。
その他、SDカードに記録してあるモーションデータのCSVファイルから、データを読み出しながら
スムーズに動くか(データの読み出し待ち時間のためにデータ更新サイクルが乱れないか)試してみました。
特に問題ありませんでした。
処理が間に合わないようならば、モーションデータのファイル形式をバイナリ形式にして、データ変換処理を
軽くしようかと考えていましたが、大丈夫でした。ファイル形式変更は、CPUの計算リソースを別の処理に多く
割り当てたくなった時にしようと思います。
次は、足先の軌道のみ前もって計算し、リアルタイムで逆運動学計算をしながら歩けるか試してみようと思います。
これが出来ると、加速度/角速度センサーなどの情報を、腰や足首等の1関節の動きにフィードバックするのではなく、
歩行モーション全体にフィードバックできるようになるので、歩行の安定をだいぶ高められるのではないかと思っています。
13.03.24
pen4_vcをmbedへ移植
PC用として、歩行モーション生成用にVC++で作ったpen4_vcをmbedに移植してみました。
移植にあたっては、下記の様な点を書き換えました。
- strcpy_sやfopen_sなど、マイクロソフトのコンパイラ固有?と思しき関数をANSI標準の書式に戻す。
- printfの2バイトコード(日本語)を1バイトコードに直す。
- モーション生成時の配列の個数を256から64にする。
- モーションデータの出力先をSDカードに変更する。
結果は比較的簡単に動きました。配列を256にすると暴走するので、まあ何とかメモリが足りたというところでしょうか?
モーションを一気に計算してみて、浮動少数点の数値計算が、WindowsXPの出始めの頃のパソコンよりも、むしろ速いくらいに感じました。
生成されたモーションデータのcsvファイルを、PCで計算したものと比較もしてみました。
RCサーボに出力する数値も完全に一致していたので、計算と中の桁落ちなども、Pen4を動かす程度ならば、気にしなくても良さそうです。
なかなかいい感じでした。
13.03.17
マイコン換装(関節パラメータファイルの調整)
RCサーボに与えるパルスの幅と、各関節の角度の関係を記した「関節パラメータファイル」を
調整しました。元のH8/3067のプログラムと、今のH8/3664のプログラムで、PWMパルスを作る
関数のアルゴリズムは同じなので、CPUのクロックが20MHzから16MHzに変わった事を反映させるだけで
済みました。(具体的にはそれぞれの角度に対応するPWMパルスの幅を決める数値に16/20=0.8を掛けただけでした。)

これで歩行モーションが作れるはずなので、pen4_vcで、足の位置を座標で指定して、各関節の角度から、
PWMパルスの幅を求める計算がうまく働くか確認しました。写真は右足を前に30mm、左足を後ろへ30mm動かす
様指示してみたところです。
特に問題なかったので、次は、これまでの自分のロボットではリソースの都合で出来なかった、歩行中に歩行のサイクルや
スピードを変える機能を実装するため、どうするのがうまい方法か検討しました。
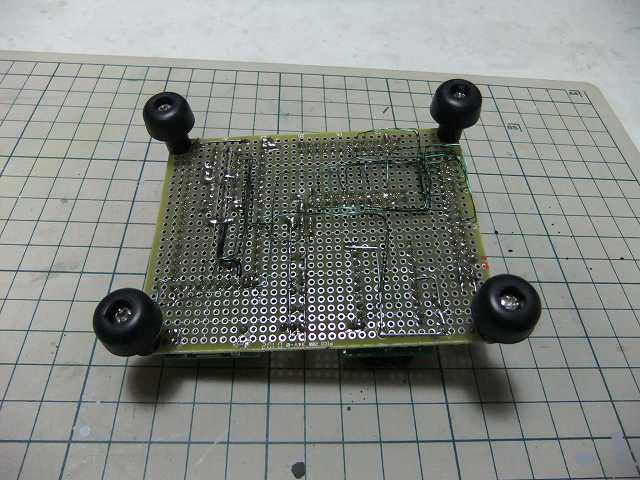
I/Oボードの回路図
13.03.10
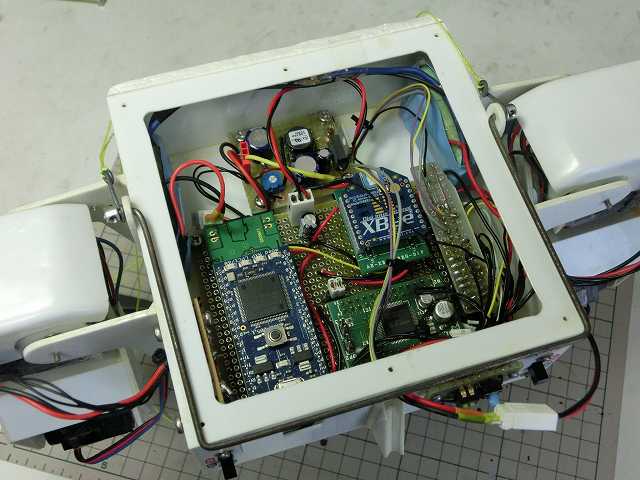
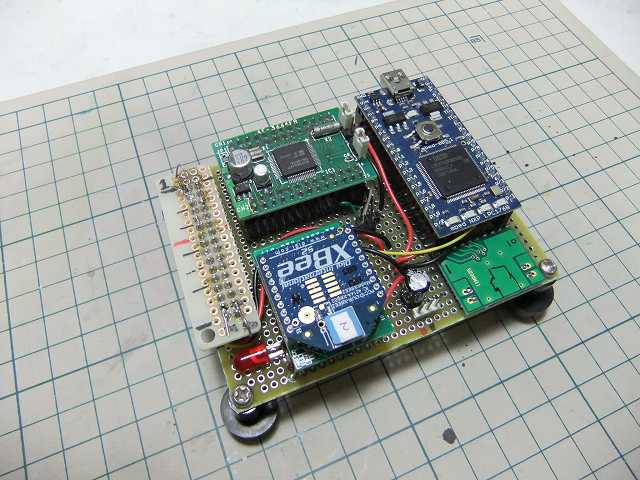
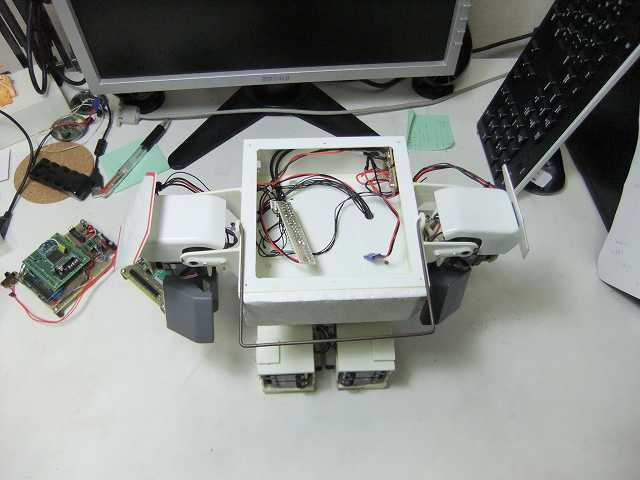
マイコン換装(I/Oボード取付等&動作確認)
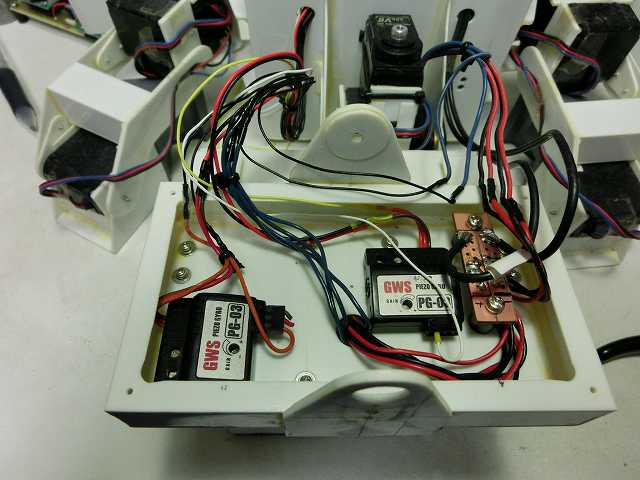
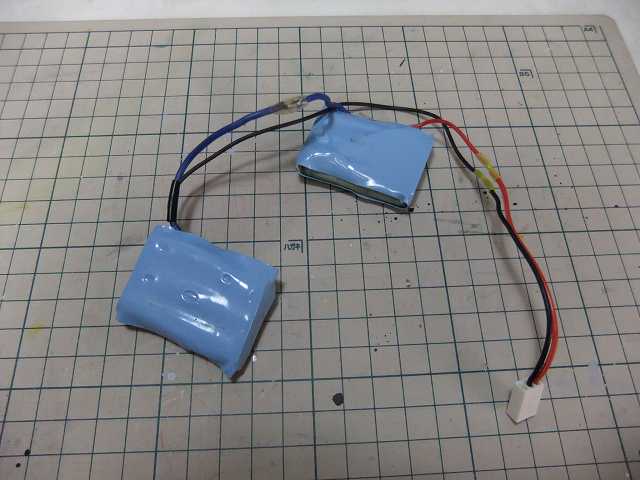
バッテリー、電源ユニット、I/Oボードを取付ました。

UNIで使っていた7.2V/700mAhのNiMH電池です。元はひと固まりでパックされていたものを、積み込むスペースの
都合で2分割して物干し竿用の熱収縮チューブでパックしなおしています。
最後に使ってから5年くらいたっていますが、充電できたのでとりあえず使ってみる事にしました。

電池と電源ユニットを取り付けたところです。(背中側から見ています)

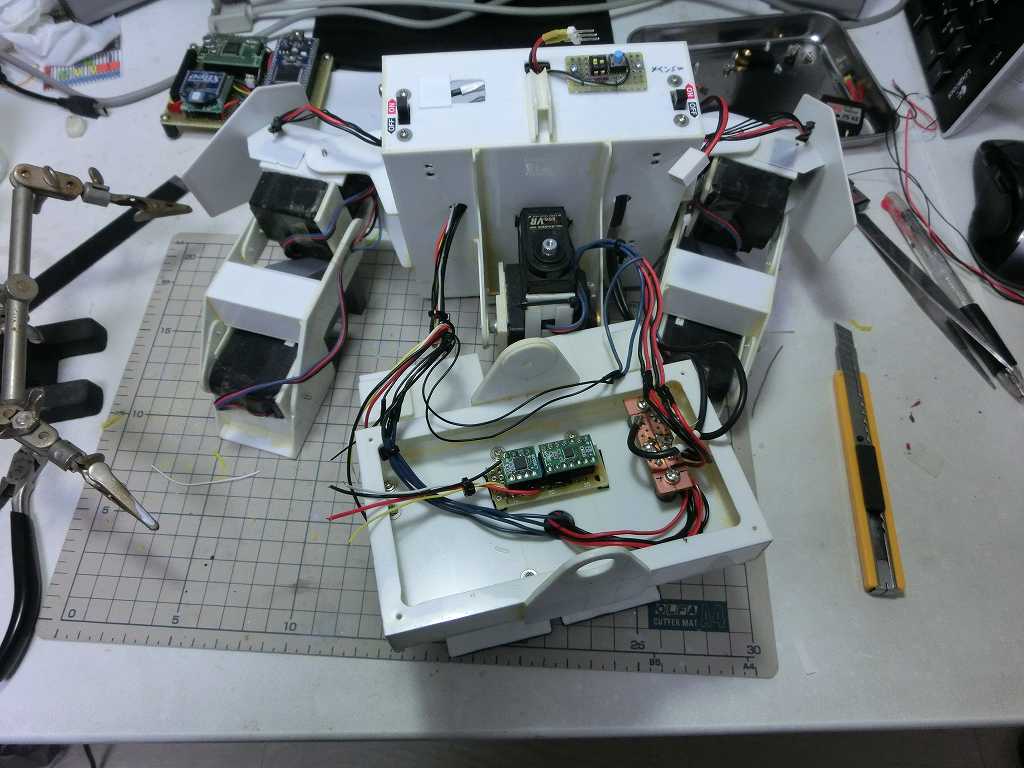
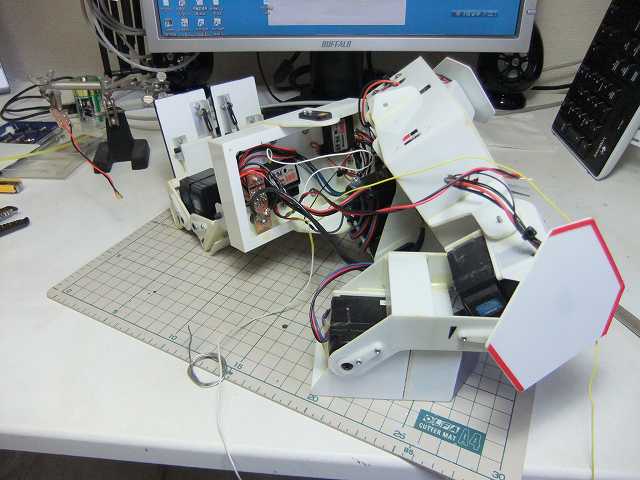
RCサーボとジャイロが正常に動作しているか、動作確認しました。写真は
その途中で立たせてみたところです。
I/Oボード取り付けにあたっては、Pen4の元の位置では電源ユニットが入らなかったので、
背中側へ5mm動かしました。
13.03.03
マイコン換装(RCサーボ/ジャイロインターフェイス用ソフト作成)
H8/3664用にRCサーボおよびジャイロとインターフェイスするプログラムを用意しました。
構成が一番近い、UNIv2のサブCPU用ソフトをベースに、接続するジャイロの数を3個から2個に減らし、
RCサーボの接続数を8個から12個へ増やすようにコードを変えました。
マイコン換装(ジャイロ追加)
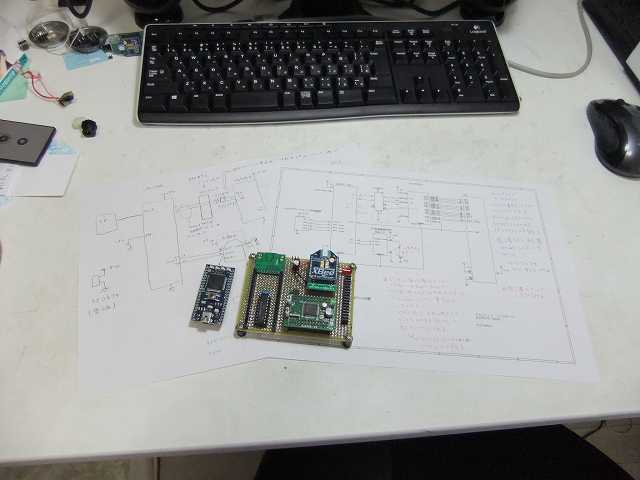
13.02.17
マイコン換装(設計、配線)
13.02.11
マイコン換装(設計、配線)
13.01.27
マイコン換装(コンセプトまとめ)
13.02.11
メモ:本の発売から2年間をサポート期間として設定していましたが、5年以上経ち(月日の経つのは早いものですね)
、まだ時々質問のメールをいただいてはいますが「そろそろ良いだろ〜」ということで、作例のPen4号
を自分の工作の材料に転用することにしました。
というわけで、ここから先は本サイトの他のロボット同様、普通の工作の記録になります。
戻る
ホームへ戻る











{kind=link}
{kind=link}
{kind=link}