
[仕様]/ [ムービー]/ [写真]/ [システムブロック図]/
[仕様]/ [ムービー]/ [写真]/ [システムブロック図]/
| 全高 | 340mm |
| 全長 | 440mm |
| 全幅 | 260mm(触覚除く) |
| 重量 | 約3.5kg(PC除く) |
| モーター |
RC用サーボモーター 計1個
走行用モーター 1個 |
| 電源 |
Lipo電池(7.4V3000mAh) |
| センサー |
|
| CPU |
DELL Inspiron11 3000 2-in-1(Windows 10 Home 64bit/Core m3-7Y30) mbed NXP LPC1768 |
|
走破性のデモ1
起伏のある砂地でも遊べます。
暴走した時も簡単に追いかけて止められるよう、自動モード |
|
|
走破性のデモ2
車輪の大きさの割に大きめの障害物を超えられます。 |
 |
 |
 |
 |
|
システム全体 本体とPCで構成されます。 |
作業中のスナップ トレイを載せてみたところです。 |
基板の配置 トレイにマイコン他が載りました。 |
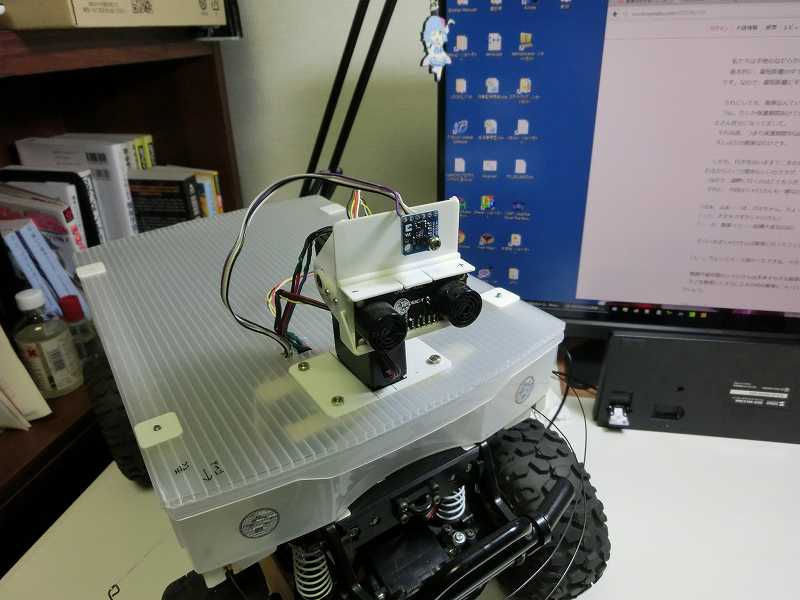
センサーヘッド w8から流用しました。 |
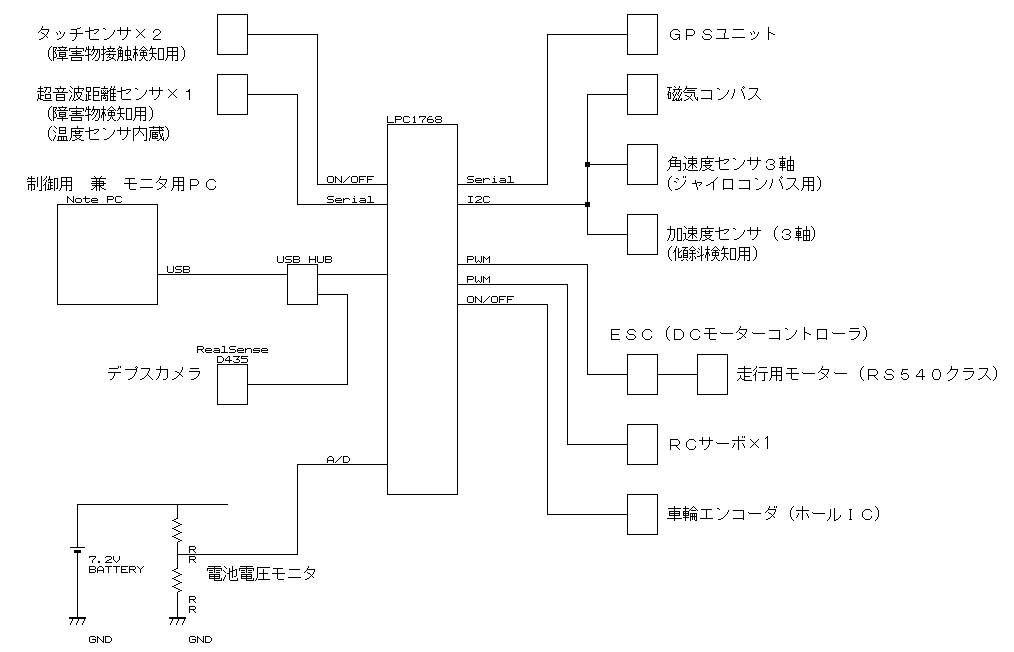
マイコンのI/Oボード回路図(2017.07.09版)
{kind=link}