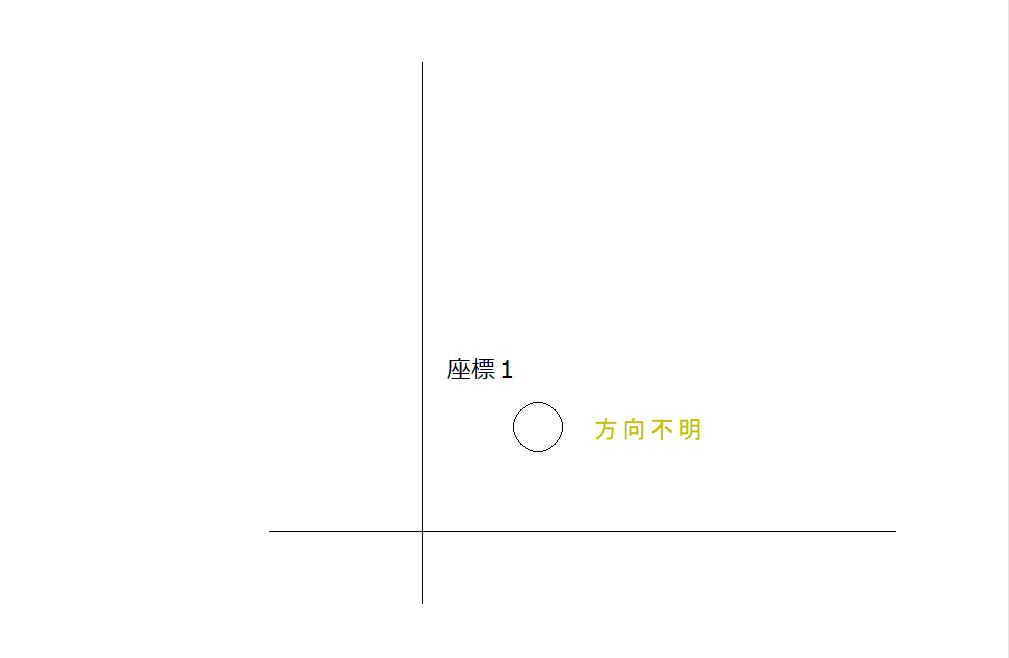
2.現在ロボットが向いている方向へ5m程度直進
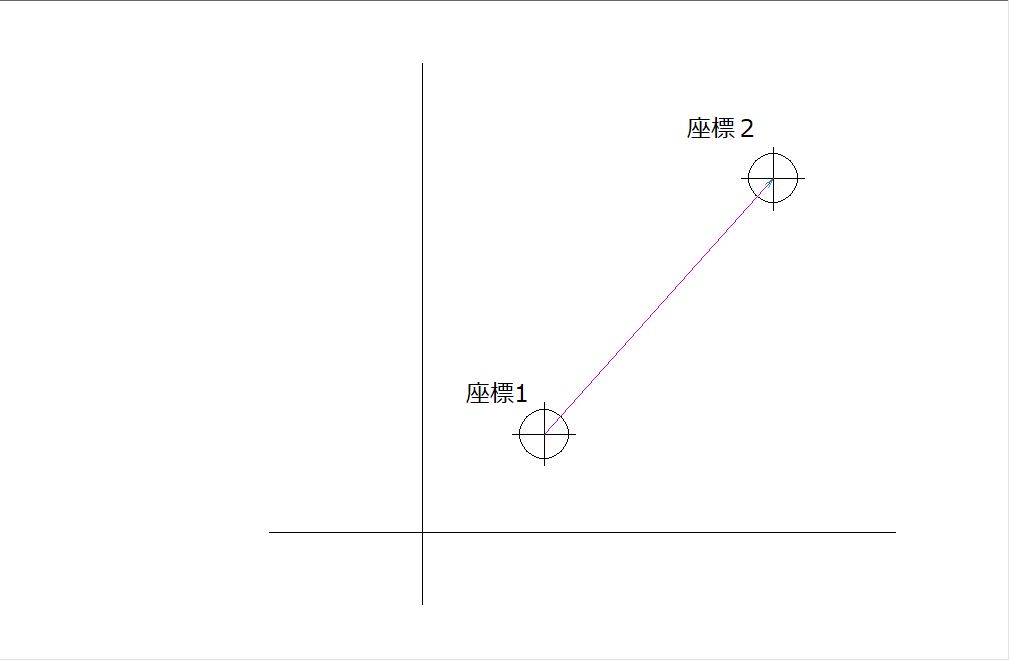
3.現在位置測定(座標2)
- ウェイポイントからの距離が一定以内(例えば3m)ならば、目的地を次のウェイポイントに切り替える。
- 今いる場所が最終ウェイポイント近傍ならばループを抜けて処理終了。
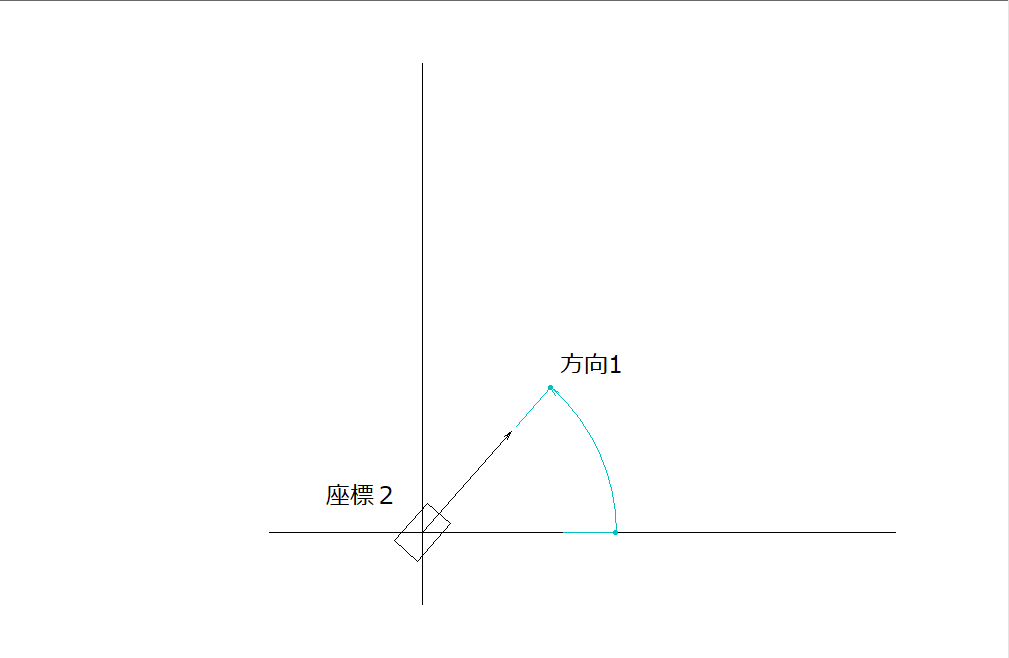
4.座標2-1の差をとって現在のロボットの方向を求める(方向1)
-
ループの初回のみ「座標1」を使い、2回目以降は手順7で測定した「座標3」を使い方向を求める。
5.座標(ウェイポイント)-座標2の差を取って、次の目的地までの距離と方向を求める。(方向2)
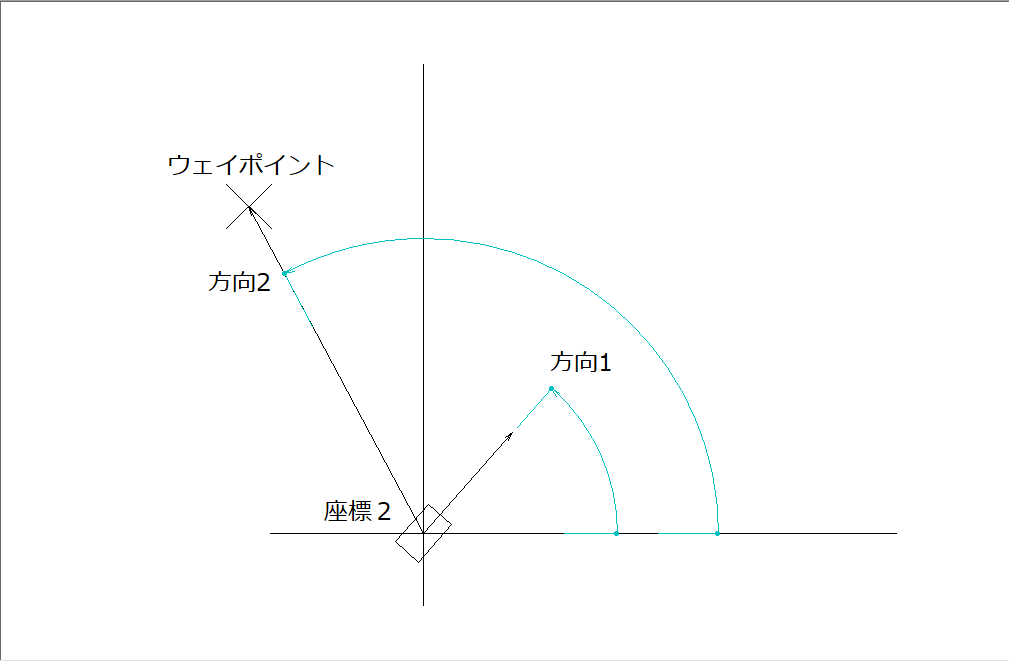
6.目的地の方向(方向2)へ向くように旋回する
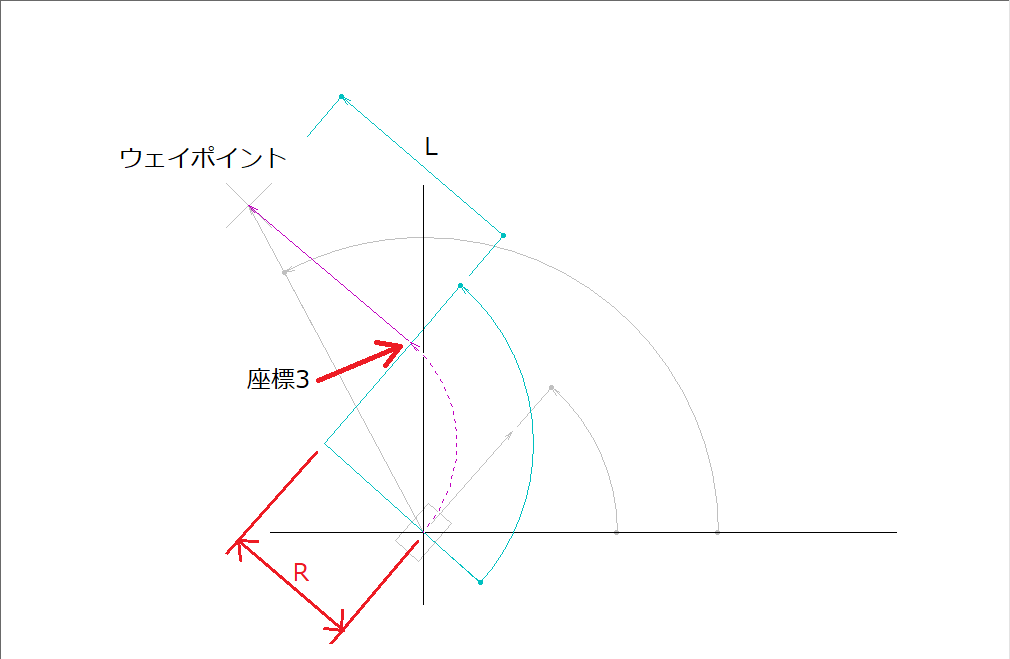
(ロボットの旋回半径(R)を計算に反映すると、より正確に移動できる。)
7.現在位置測定(座標3)
8.座標(ウェイポイント)-座標3の差を取って、次の目的地までの距離求める(L)
9.目的地に向けて直進する。
- 目的地までの距離が一定以上(例えば5m)のときは、今回の移動距離を5mとする。
- 途中で障害物に接触したら回避動作を行う。
- 走行距離と速度は車輪に装備したセンサからのパルスを数えることにより計測する。
10.手順3へ戻りループ