概要
1.直進トリム
リモコン操縦でグランドの線等に沿って20m程度走らせて、RCサーボへのPWMパルス幅をいくらにすれば
真っ直ぐ走るかを求めます。RCサーボが例えば1500マイクロ秒のパルスで止まる位置は、RCサーボ機種により
大小はありますが温度(気温とRCサーボ自身の発熱による)によって変わるので、自動走行をする前に測定します。
リモコンモードでは、ノートPCのカーソルキーで操縦しています。通常のリモコンモードでは、左右方向のカーソルキー
を一回押す毎に100マイクロ秒PWMパルス幅を変化させていますが、トリムモードの時は5マイクロ秒ずつ変化させて
、ちょうどまっすぐ走るパルス幅を探ります。こんなもんだろーという数値が見つかったら、トリムモードを解除し、その数値
を記録します。
2.車輪エンコーダのパルス数と移動距離の関連付け
車輪に付けたエンコーダ(ホール素子とネオジム磁石の組み合わせ)から来るパルス数と、
実際に移動した距離の関係を、地面に敷いた5mの巻き尺に沿って何回か走らせて求めます。
この数値は、厳密にいうと気温変化によりタイヤの硬さが変わり、その影響でタイヤの直径が変わるので
変化しますが、GPSの測定誤差に比べて無視できるので、ロボットの製作途中で1度測定するだけです。
一定速度で直進し、目標パルスカウント数で走行用モーターをOFFにした時、完全に停止した場所までの距離
を測定した結果から回帰計算で関係式を求めると、土のグランドか、芝生の上かなど、地面の状態に影響をうけ
ますが、慣性で走る距離まで入った式ができます。現状は路面の状態による誤差と、測定した時と違う速度
で走った時に慣性によって走る距離が変わることの誤差も無視しています。
3.エンコーダのパルス数と旋回角度の関連付け
予め決めておいたPWMパルス幅でステアリングした時の旋回直径を、地面に残ったタイヤの跡を
巻き尺で測ります。
左右それぞれ大回り、小回りの合計4回測定します。
スタート地点に印を付けて、リモコンモードで一定のステアリング操作をした後、同じ場所に戻ってくるまで
時速1km/h程度の速度で360度旋回します。
この時のエンコーダパルス数も記録します。
測定結果の使い方としては、例えば90度旋回する場合は、360度の時の1/4のパルス数走行するという感じです。
旋回直径を大きくすれば、その分360度旋回に要するパルス数が多くなり、すなわち分解能が
上がるので、自動走行時に旋回方向をより正確に制御したい場合は、旋回直径を大きくとるようにしています。
アース・ローバー01の時は、この方式で旋回角度の制御をしていました。02でも出来るようにしてありますが、
比べてみたら、ジャイロコンパス(ジャイロの積分値)で制御した方が精度が良かったので、そちらに変えました。
4.ジャイロのドリフトによるオフセット計測
5.磁気コンパスのオフセット計測
一定時間おきに磁気コンパスの測定を行い、記録しながら360度旋回します。
測定終了後、測定値のX,Y成分を平均し、その結果をオフセット値とします。
幾何的に解釈すると、
測定誤差や外乱が全くない場合に、測定結果はX=0、Y=0を中心とした円としてプロットされるはず、という
考えを前提としてXY平面の原点からずれた位置に中心をもつ円のずれ量を求めていることになります。
これにより、ロボットに搭載している各種の磁気を帯びた部品の影響を低減しています。
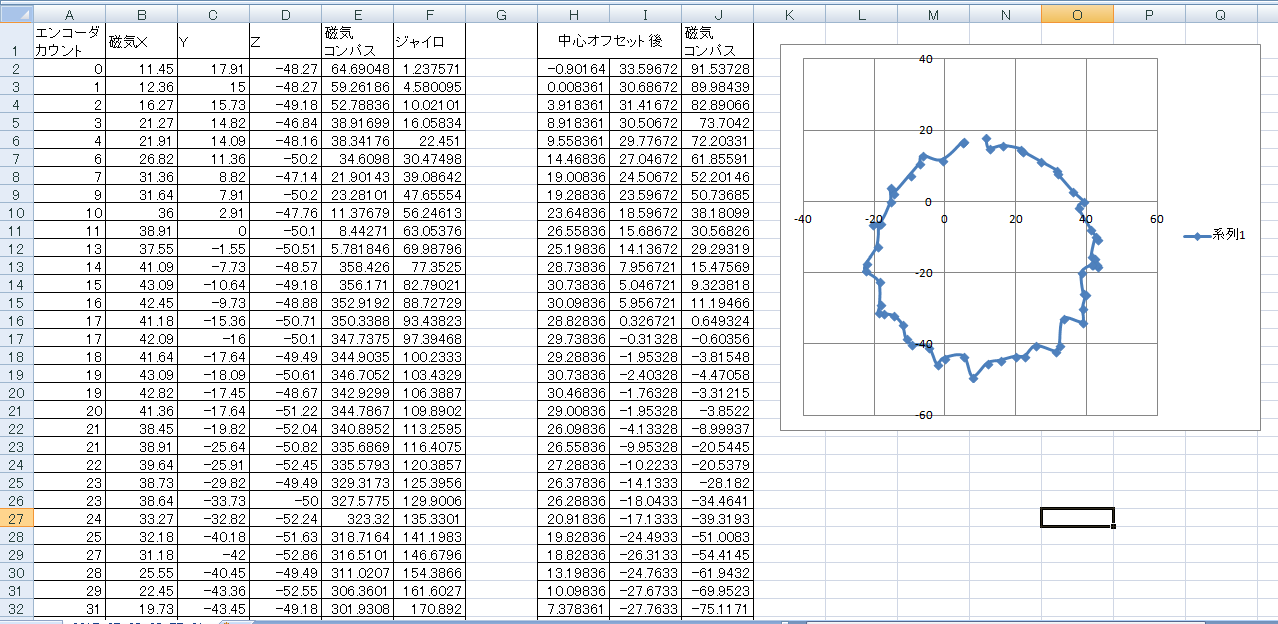
測定サンプル
アースローバー02では磁気コンパスを、走行用モーターとエンコーダ用のネオジム磁石から遠い場所と言う事で、
メカトレイ左後ろ端に搭載しています。しかしまだ影響が大きい感じなので、ロボットの持ち運び
を気にしなければ、GPS受信機と共にマストでも立てて、その上に搭載するのが良さそうだと思います。
以上(2017/8/7)
アース・ローバー01のトップページへ戻る
アース・ローバー02のトップページへ戻る
ホームへ戻る