車両型ロボット アース・ローバー02の製作日誌 その1
製作の区切りごとに、新しい物から古い物の順に書いてあります。
20.03.04
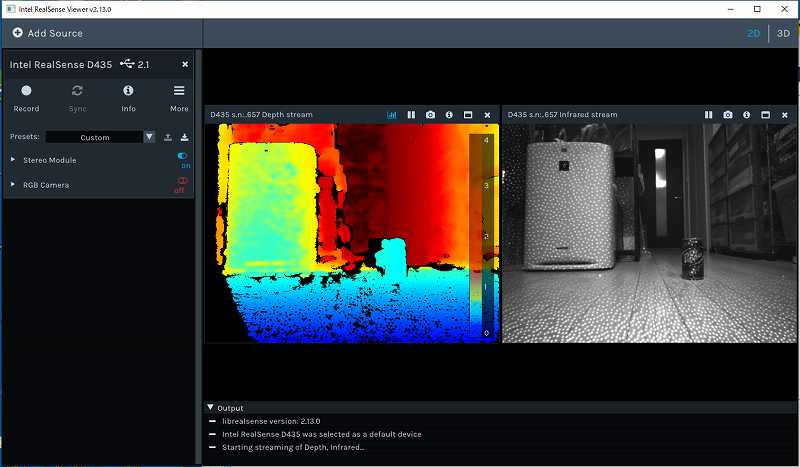
RealSenseの出力からレーダーチャートを作る(3)
ノートPCにプログラムの開発環境をコピーして、外で動かしてみました。
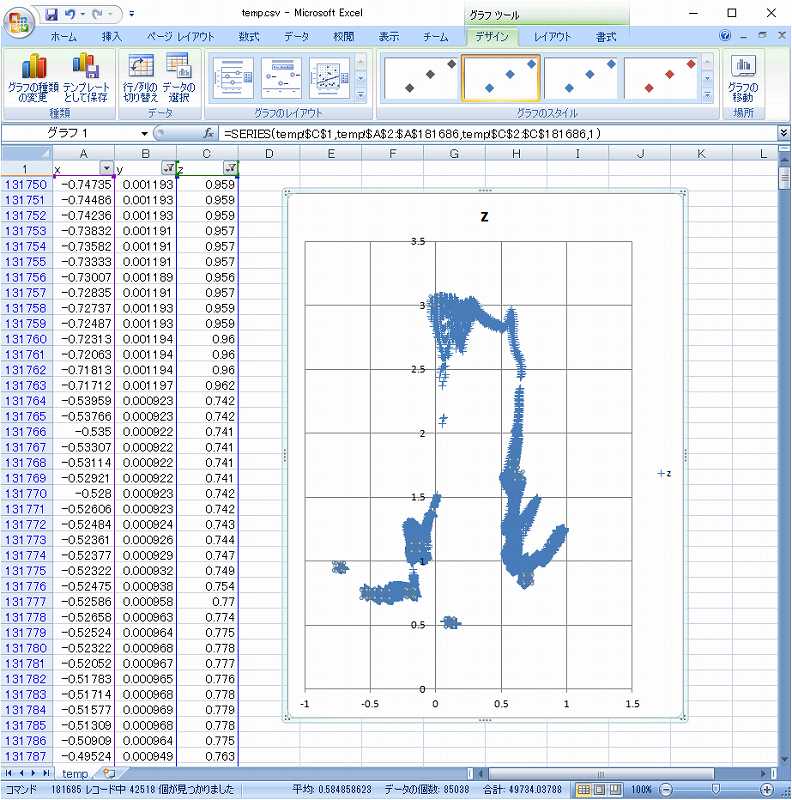
レーダーチャートの更新周期は期待に反して十数秒に1回と残念な性能でした。高速化は別途取り組むとして、
せっかく出かけてきたので生垣との位置関係をいろいろ変えて測定してみました。
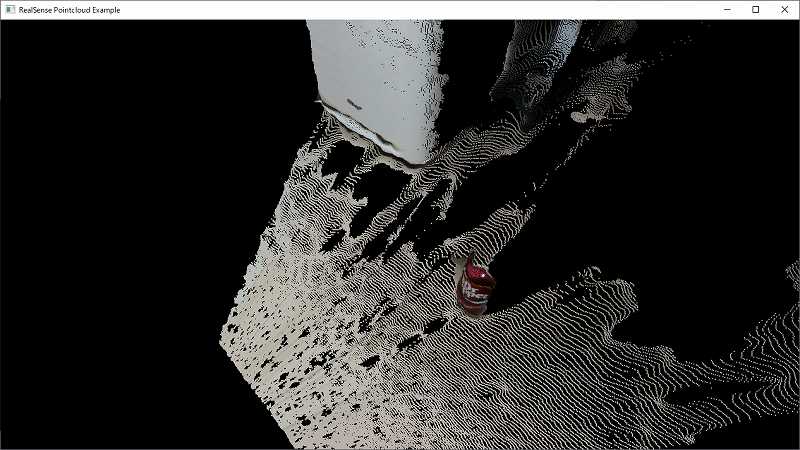
赤外線カメラの映像が露出オーバーになって、白くとんでいるエリアが多いので、思ったほどポイントクラウドデータが
取れませんでしたが、それっぽいレーダーチャートを取得することができました。
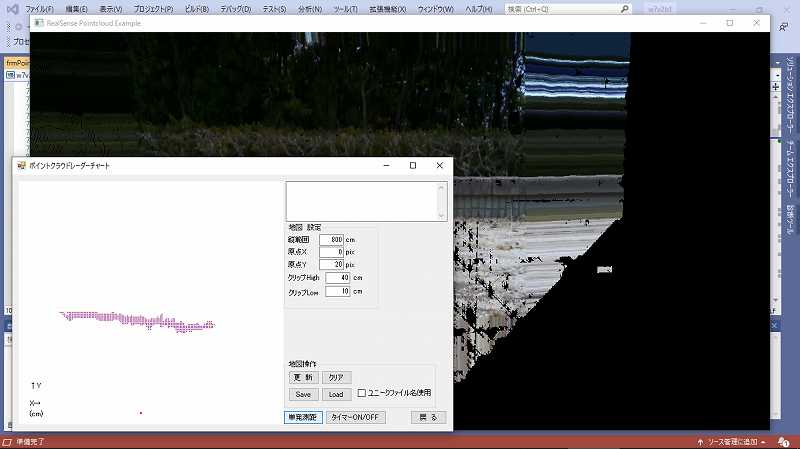
レーダーチャート
約4m先の生垣を測れました
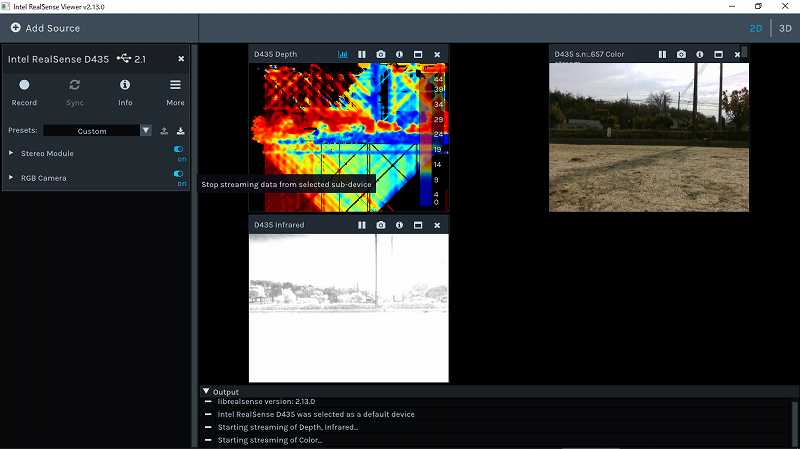
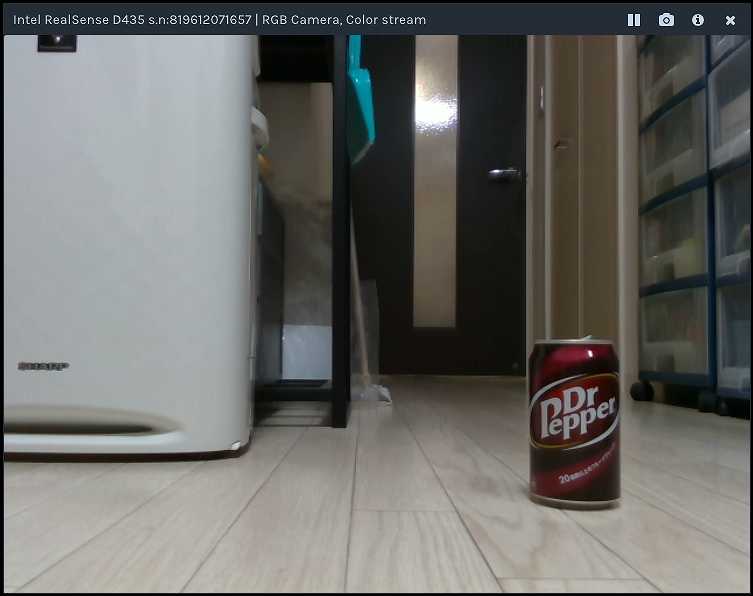
距離画像・赤外線画像・可視光カラー画像
レーダーチャートをとった位置と少し違いますが、大体こんな感じでした。
20.02.11
RealSenseの出力からレーダーチャートを作る(2)
とりあえずレーダーチャートの更新は1秒おきくらいで良いこととして、rs-examplesからのポイントクラウドの
データはCSVファイル渡しにて既存の制御プログラムに受け取る方向で作りました。
具体的にはw8から持ってきた、超音波センサで周囲をスキャンした結果を地図のように表示するクラスとミックスして
実装してみました。
ポイントクラウドをスライスしてもまだデータが多いので、ポイントをタイルパターンに当てはめて
データを間引いてから使うようにしました。
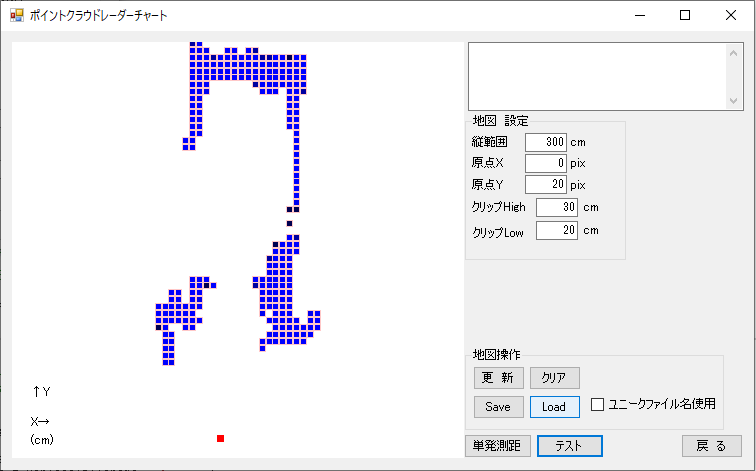
w7v2b1に実装した画面。
タイルのある場所がモノがあって進入不可のエリアです。
赤い点にD435が置いてあって、ピクチャーボックスは縦横3mくらいの
範囲で1回の測定分を描いています。(前回の記事の場所とだいたい同じ所から測定し、缶は無し)
実際に走らせてみてどの程度役に立つかはひとまず置いておいて、概ねイメージどおりのモノが出来
たかな~と思いました。
もう少し作りこんだら、外で遊んでみようと考えています。
20.02.02
RealSenseの出力からレーダーチャートを作る(1)
19.10.27
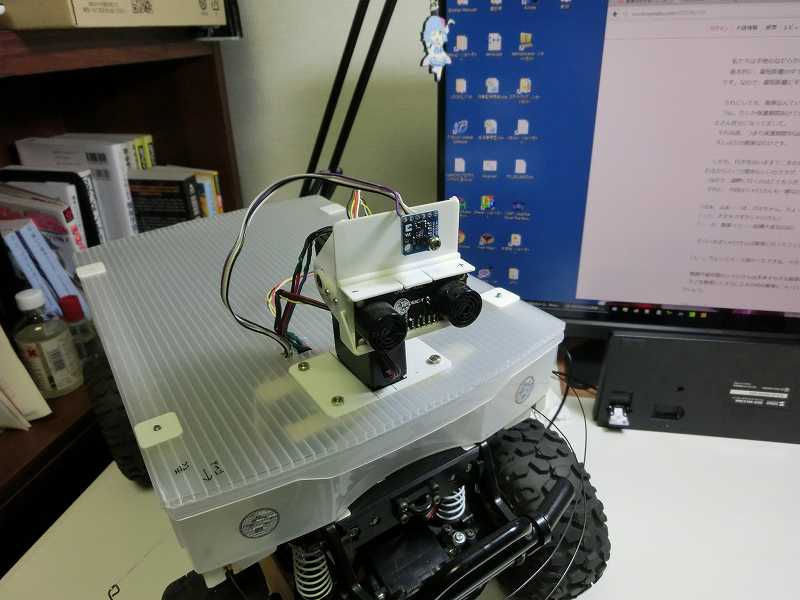
RealSense搭載
早いもので買ってから1年以上たってしまいましたが、なんかロボットに載せてみよう!ということで
電力やスペース的に余裕があるER02に載せてみました。前方障害物の検知に使えるか
試してみようと思っています。
RealSenseのファームウェアをアップデートしたらUSB2も使えるようになったので、すんなり載せることが
出来ました。


簡単なベースをプラ板で作って付けました。お試し用なので、パン・チルト機構無しの固定です
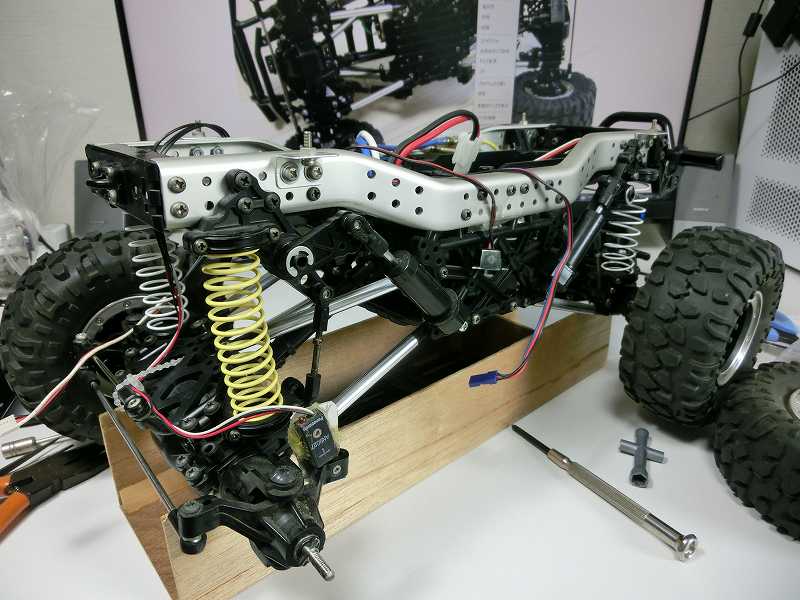
当面はいつも通り、ノートPCを片手に、ロボットとPCを有線接続して後ろをついて歩きながら実験してみるつもりです。
でも気が向いた時にノートPCをロボットに載せて走らせられるように、サスペンションのスプリングも強いもの
(黄色いコイルスプリング)に戻しました。(写真は作業中の様子で、1本戻したところ)
17.07.08
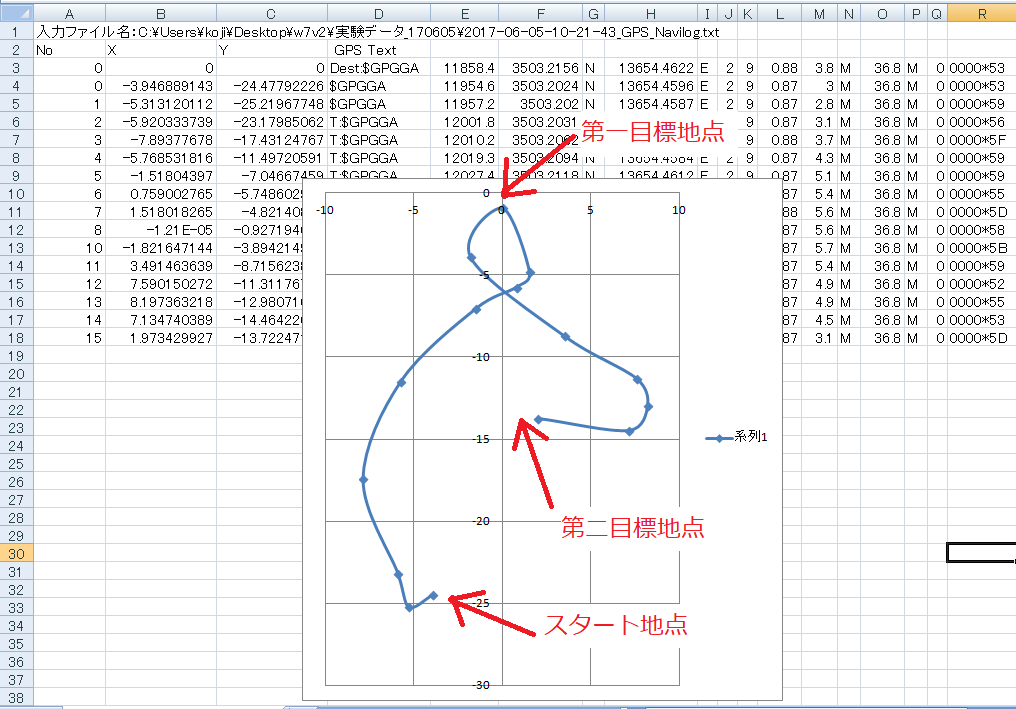
GPS測定値のゆらぎの測定
ロボットが停止していても、GPS測定値の位置は測定誤差により変わります。今積んでいるGPSユニットで、
いつも走らせている場所で、どの程度ゆらいでいるのか5分ほど測定してプロットしてみました。
GPSの測定精度を検証している方々のHPを見ると1~数時間程度のスパンで測定しているのを
よく見かけますが、ER02については、だいたい1回の走行テストは5分程度なので、5分程度の
スパンで測定してみました。
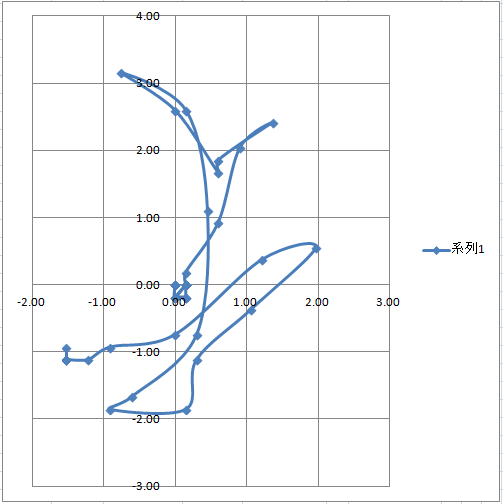
グラフのマス目は1mで、10秒間隔で測定した点をつなぎました。
最初の測定値の座標を(X,Y)=(0,0)として描いてあります。
これを見ると、ウェイポイントの間隔を20m、位置計測を7mおき程度で走らせれば蛇行するのも当然だわなーと思いました。
ER01の時に積んでいたeTrexHの時は、同じように10個程度の衛星を補足した状態で、こんなに動かなかった
ような記憶があるので、これはなにか、ロボットの制御ソフト側で処理してから使った方が良いのだろうと思いました。
17.06.18
超音波距離センサ(URM37)の設定変更
前の書き込みのとおり、W8の時の使い方で使うと測定距離が一定以上になった時に制御サイクルを超える測定時間が
かかるので、URM37の「ON/OFFモード」という、予めセットした距離以下の反応があった時端子のHigh/Lowが変わる
、近接スイッチの様に働くモードを設定して使ってみました。
このモードは、マイコンから見てあるピンのHigh/Lowをチェックするだけで良いので、距離センサユニット側で測定に
要している時間に関わらず制御ループが回り、衝突防止目的のセンサーとして都合よいです。
GPSで予め登録しておいた経路に沿って走らせながら、衝突防止目的で機能するか?誤検出はどの程度か?など
様子を見たところ、1回あたり100m位のコースを20回くらい走らせた範囲では誤検出も無く機能しました。
これまでに使った超音波距離センサユニットだと、ロボットの全体制御をするマイコンやPCのソフトで行なっていた
気温による音速の補正や、測定レンジオーバー、測定失敗時の処理などをユニット搭載のマイコン側がが処理
してくれる上、気温30度で、ユニット搭載の温度センサの読みが40度くらいの時も動作が安定していたので、
使いやすくて良いユニットだと思いました。
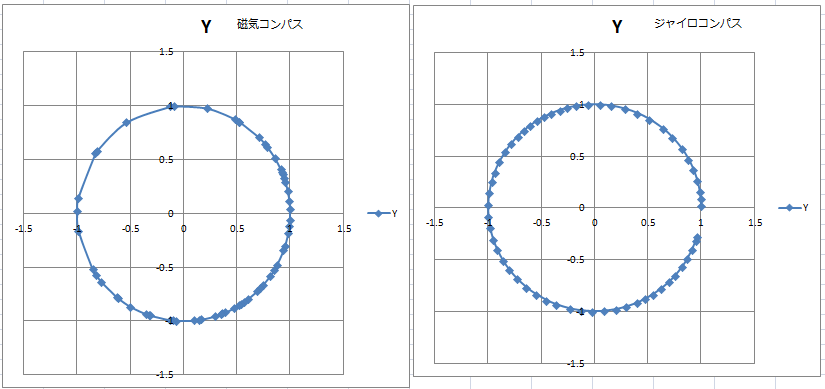
磁気コンパス(HMC5883L))の補正
2017/2/19のフィールドテスト#3で必要性を感じたので、補正の機能を作ることにしました。
まず初めに、補正前の状態を見るため360度旋回しながらX,Y,Z軸に分けて記録をとりプロットしてみました。
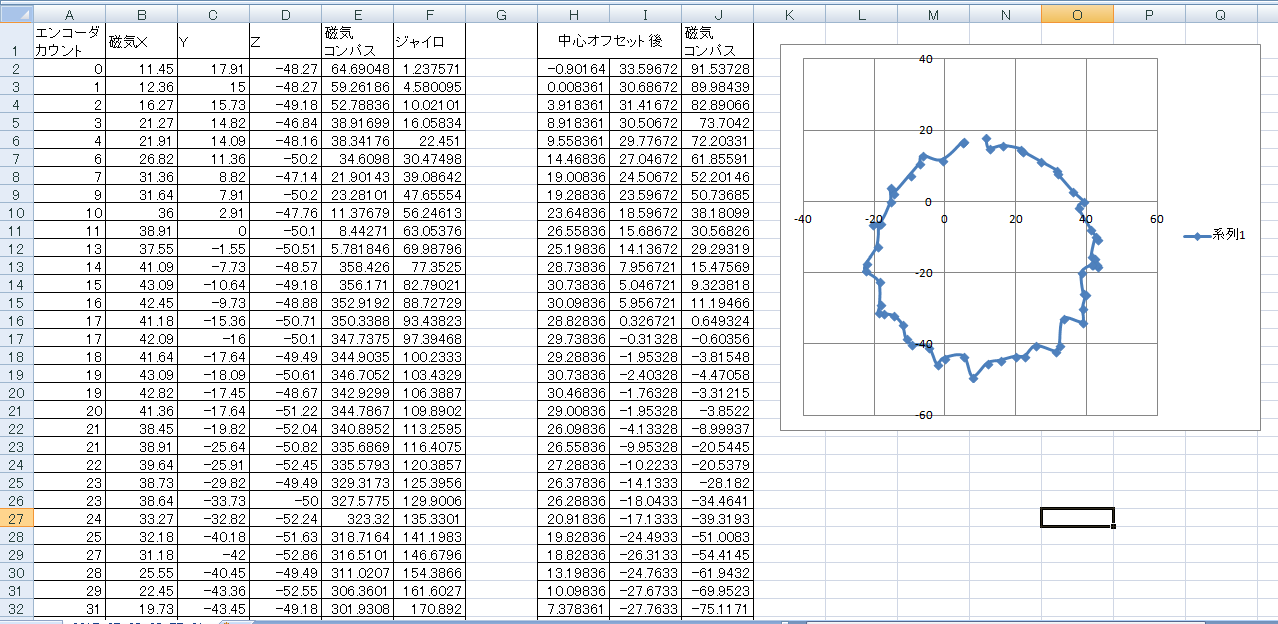
測定サンプル
数回測定してみたところ、プロットはだいたい円形になっているので、円の中心をX=0,Y=0にオフセットしてからATAN2で角度を
求めるだけで、だいぶ良くなりそうな感じがしたので、その方向でやってみました。
旋回角度の測定方法変更
ジャイロのZ軸測定値の積分によって旋回角度を測定するルーチンについて、走行開始前にドリフト値を測って
オフセット値として積分計算に含める、積分の計算を単精度から倍精度の変数に変える、デルタtの時間を
より正確に測る、等の対策の後に、ER01以来の測定方法と同程度以上の精度で測定できる様になったので、
旋回角度の測定方式をジャイロを使った方法に変更しました。
この変更により、走行前のRCサーボの温度ドリフトの影響をキャンセルするための測定走行が省略可能になるとともに、
芝生の斜面を横切る時の様に車輪のスリップが大きい場合の旋回角度測定が正確になりました。
ちなみにこれ以前は、後車輪のエンコーダカウント値から旋回時の円周をどれだけ進んだか求め、そこから
旋回角度を求める方式をとっていました。
経路トレースタイム短縮の試みいろいろ
20~30m程の間隔で置いたカラーコーンの座標を予め登録し、その座標をトレースする所要時間を短縮する
方向でPC側の制御ソフトに機能を追加し、走らせてみました。
具体的には、移動速度にメリハリを付ける(1km/h~5km/hで変化させる)機能と、目標ポイントまでの距離が一定以上の時は、GPS測定のために
止まらない機能を付けてみました。
ここしばらくのテストでは、コーンの間隔がGPSの測定誤差(3m程度)に比べて短いせいか、進行方向を計算するときの
誤差が大きくなり、蛇行する場合が多く、結局移動経路が長くなるため、ゆっくり正確に走る方向で作ったソフトの時に比べ
タイム短縮につながらなかった感じでした。
経路のプロット
17.04.09
距離センサ搭載
やっぱり衝突防止にあった方が便利かな?と言う事でW8のセンサーヘッドを移植しました。ER01のセンサーヘッドも
残してありますが、当面はカメラを使う予定が無いので、より軽くて簡単なw8の方を使いました。

外で簡単にテストしてみた結果、レンジオーバーの時にセンサーから結果が返るまでの時間が、制御ループのサイクル時間
である20msec以上にかかる点の考慮が無かったので失敗でした。この点に対策し、また試そうと思いました。
ネットで知ったVL53L0Xを買って付けてみました。(写真では超音波距離センサの上に付いています)
買ってから詳しくマニュアル類を読んで気が付いたのですが、
ER02の様に外で使う場合、車体の長さ程度しか測定レンジが無く、測定時間もおなじみの超音波距離センサや
PSDセンサと比べて特に短いわけでもなく、消費電力も大差ないけれど、プログラムの準備が面倒という
かんじで、メリットを感じませんでした。
ただ、太陽の影響がない屋内用の小さなロボットには、センサー自体が小さいのでPSDよりも良いかも?と思いました。
テストはmbedでSTM32用に公開されていたソースコード(メーカー提供APIベース)を使わせてもらいました。
ER02はLPC1768を使っているので、ソースの中のピンアサインや割り込み部分等を少し変えて使いました。
17.03.06
ここしばらくは、週末に外でテスト走行をしては制御ソフトを作りこむ・・・というサイクルで遊んでいました。
フィールドテスト#2(2017/2/10)
雪がちらつく寒い日でしたが、PCもロボットも特に問題なく動きました。
ただタッチパネルが使える手袋を持っていなかったので、素手でPCを操作していて手が冷えて大変でした。
テストでは以下の項目を確認しました。
- フィールドテスト#1の後で、LPC1768のハードのカウンタタイマでパルスを数えるように変更した結果を実際に走らせて確認しました。
普段使う5km/h程度の速度まで試して特に問題無くなりました。
- w8で使っていた、ジャイロのZ軸測定値の積分によって旋回角度を測定するルーチンを試してみました。車輪に付けたエンコーダ
による測定値と比較してみて、だいたい同じだったので、使えそうだと思いました。
- 現在の構成では、トレイのスペースに余裕があるのでラジコンの受信機も載せてあります。この日は最後にステアリング用のRCサーボと
ESCのコネクタを受信機に差し替えて、ラジコン操縦で走らせてどの程度の段差が超えられるか等見てみました。これはこれで、けっこう楽しかったので
時々遊んでみようかな、と思いました。
フィールドテスト#3(2017/2/19)
車輪に付けたエンコーダの調整と、ソフトのコーディングが一区切りしたので、高さ10cm程の小さな三角コーンを配置して、
あらかじめ登録したポイントをたどる動作のテストをしました。
エンコーダに関するキャリブレーションが、まだ適当なのでER01の最後の方の様な精度が出ませんでしたが、それなりに走りました。
具体的には以下の項目を見ました。
- 走行中に、車体前にある触覚の様なタッチセンサーに触った時にキチンと止まるか。(タッチアボート機能)
- 走行開始時の例外処理として磁気コンパスの測定値を利用し、その後はGPSで走行経路から進行方向を求められるか。
- 走行開始、走行中、目標近くでそれぞれ時速で指定した速度に加減速できるか。
フィールドテスト#4(2017/2/27)
傾斜があり、芝生の密度も一定しないという、走行抵抗が一定しない地面の場所で走らせてみて、走行速度を制御する機能が
うまく働くか見ました。ER01の時からある機能ですが、傾斜が急に変わり、その時のアクセルでは停止してしまう場合の処理を追加したので、
追加部分がうまく動くか見ました。
#3でジャイロコンパスがそれなりに働くことを確認したので、#4では旋回角度の測定にジャイロコンパスを使うモード
を追加して動作確認しました。
登坂も下り坂も、例えば2km/hと指定したら、だいたいその速度で走るか?といった速度制御の方は思った通りに
働きました。いっぽうジャイロコンパスのテストは動作がおかしかったので、あとでログを見ながら対策するという事にしました。

スナップ写真
フィールドテスト#5(2017/3/4)
前回ジャイロコンパスのテストがおかしかった件は、車体に付いているマイコンのリセットボタンを押した直後に、
ロボットが止まっている時のジャイロの測定値をオフセット(ドリフト)値として取り込んでいるので、ボタンを
押したときの揺れが混じってしまっているせいかも?と言う事で、PC側の制御ソフトにオフセット計測開始
ボタンを付け、これで測定してから走り出すようにしてみました。
まっすぐ走りながら#3でプロットしたのと同じ測定をしてみたところ、まだゼロから外れた測定値になっていました。
後は、シリアル通信の割り込みでGPSからのテキストデータを拾っているため、マイコンのループが回る時間の
つもりでジャイロの積分時に使っているデルタtが実際と無視できないレベルで食い違っていることが考えられた
ので、GPSテキスト受信に割り込み処理を使うことをやめ、GPSテキスト受信と、ジャイロの積分を同時にしない
様にすることとしました。
17.01.29
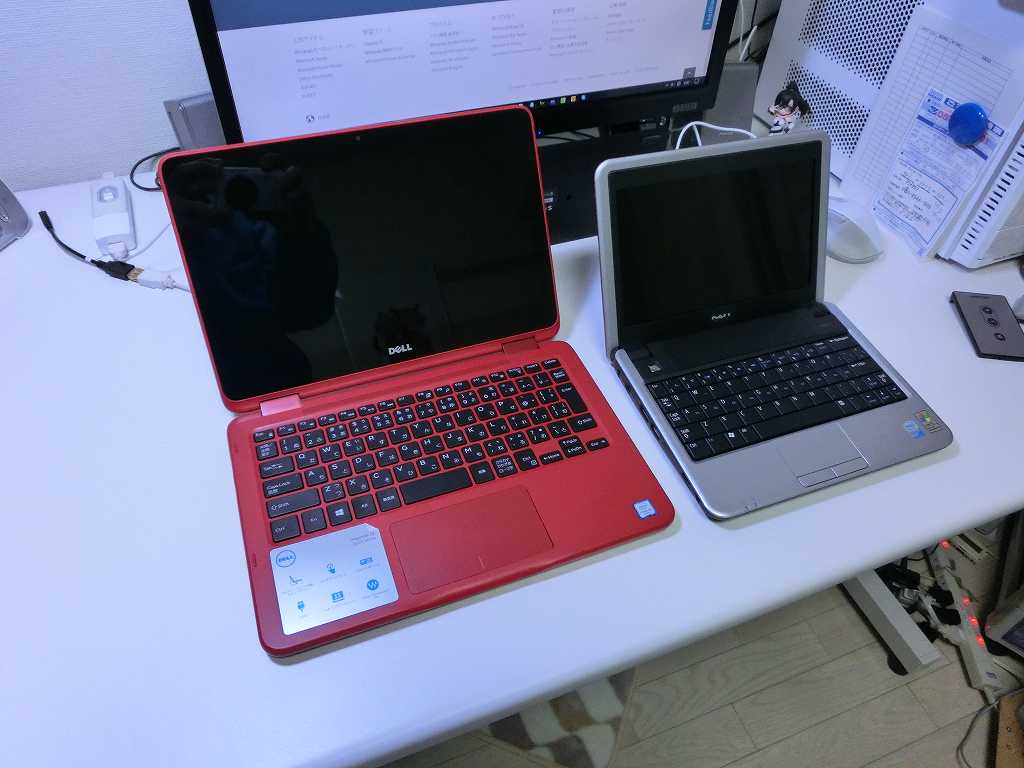
モバイルPCの新調
17.01.04の書き込みのとおり、モバイルPCを新調しました。ネットブックと同系統の安い、小型のPCということで、またDellの
Inspiron3000 2in1にしました。CPUはCore m3-7Y30 というやつで、メモリーは4G、HDDはSSDの128Gというのを選びました。
これまで使ってきたAtom N270のmini 9と比べると・・・というか比べられないくらい早くて使いやすくなりました。
まだER02と共に外に持ち出したのは1回ですが、左手にPCを持って操作しながらER02の後をついていく使い方で、タッチパネルで
操作できるのがなかなか良かったです。ただ日なたで使うには画面が少し暗いのが難点でした。

左が新PC、右が旧PCです。mini9と比べるとだいぶ大きく見えます。
新しいPCにはタブレットモードがあるので、タブレットモードで使う形にER02の画面を作ってみようかと思いました。
フィールドテスト#1
形になってきたので、近くの公園で動かしてみました。
各種試行錯誤の跡が残り、最終的には使わなくなった部分が多いER01のプログラムから、有用だった部分を切り出して
作ったプログラムなので、初めての屋外テストですが、それらしくあらかじめ登録した緯度経度をトレースする動きが出来ました。
移動距離を測る、車輪に付けたホール素子のエンコーダーの信号を、W8のマイコン側のソフトをよく考えずに移植したままソフトウェアのポーリング
で読んでいたのですが、速度2km/hですでに信号の取りこぼしが出てきたので、LPC1768のハードのカウンタタイマでパルスを数えるように変更しました。
カウンタタイマを使うにあたり、NXPのUM10360 LPC17xx User manual(Capter21のCAP2.0の説明)とmbed LPC1768の回路図を参照しました。
mbedの開発環境の中で使っていると、あまり見る必要が無いので、今回の件で、少しマニュアルに馴染んだ気がしました。


スナップ写真
だいたいOKだったので、当初の目的を目指して調整を進め、GPSユニットをはじめ、新しく積んだセンサー類で、どの程度
性能アップできるか、やっていこうと思います。
17.01.04
ER02
アースローバー01(ER01)から搭載機器や制御ソフト、見た目も変わるので、今後HPではアースローバー02(ER02)と呼ぶ事にしました。
GPSモジュールの接続方法変更
ハード的には、USBシリアル変換モジュール経由でPCに接続して位置情報を読んでいたものから、
接続先をマイコンに接続し、マイコンで読むように変更しました。
ソフト的には、VBのBackGroundWorkerで受ける方式から、、割り込み処理で常に
読み取ってある位置情報を、PCからリクエストがあった時だけ送る方式に変更しました。
ER01では、搭載マイコンがH8/3664だったので、PCを載せずに自律動作することを考えていませんでしたが、
LPC1768は、使った感覚的に後期のPC9801程度の処理能力があるので、PC無しモードを作ることも検討中です。
開発環境変更
マイコン&センサー類の搭載

1768の基本的なコーディングが終わったので、トレイをシャーシに載せました。

「シャーシにトレイを載せたまま」でも良いかな~という気もしましたが、簡単なカバーを付けよう!ということで、別の工作の
残材のアルミアングルとプラダン(ポリプロピレンの段ボールの様な断面の板)で簡単なカバーを作りました。この先、センサーヘッド
を載せるとしたら、若干補強したのち、この上に載せることになると思います。
プラダンは軽くて、加工が簡単で良かったのですが、逆に柔らかすぎて、手持ちの接着剤も無く、固定がちょっと手間でした。
具体的には3mmのボルトで留め、その周囲は1mmのプラ板をプラスチック用の両面テープで張り付けて補強しました。
(写真は補強板取り付け前)
16.12.11
新しいGPS
準天衛星みちびきをサポートしたGPSユニットが、秋月の商品一覧にあるのに気付いたので買ってみました。機種はAE-GYSFDMAXBです。
写真の様にブレッドボードにUSBシリアル変換基板とセットして、HPからダウンロードしたソフトで衛星の捕捉情報や、位置の出力などを
見てみました。

これまた、以前アースローバー01(ER01)に積んでいたeTrexHよりも性能的に良い感触でした。そこで、ロボットに積んで様子をみるため、以前
ER01として動かしていたCR-01シャーシを引っ張り出して、走らせられるように整備を始めました。

とりあえずは、ER01の初めの頃に、ベニア板にいろいろ括り付け、PCは手にもって5mのUSBケーブルでつないだロボットの後ろを歩く形で
動かしていた時と同じ構成にすることとしました。
ベニアの時は、持ちにくく、時々木の棘が手に刺さったりして、作るのは簡単なのですがいまいちだったので、今回は100円ショップで買った、
A4サイズで半透明の書類用トレイを使うことにしました。
現在は机の上で邪魔にならないように、マイコン、電源、動作確認用のRCサーボなどを搭載済の状態のトレイを、CR-01シャーシから
下した状態でマイコン(mbed LPC1768)のプログラムを作っているところです。

ER01のPC側プログラムから見て、以前と同じように見えるモードと、PCから独立してLPC1768で制御とGPSの情報を元にあらかじめ与えた
コースを走るモードを作ろうと思っています。
他には、ER01の頃はバージョン1だったOpenCVもバージョン3になり機能も増えたようなので、GPSでしばらく遊んでから画像認識機能を
強化して走らせてみようかと思っています。
戻る