
以前製作した4足歩行ロボットの4L1以降、爬虫類型の4足歩行ロボットも作りたいなーと思いつつ、きっかけ無く時間がたっていました。 コロナ対策で出かける機会が減り、仕事もヒマになったので、これは良い機会かも・・・と思い着手しました。
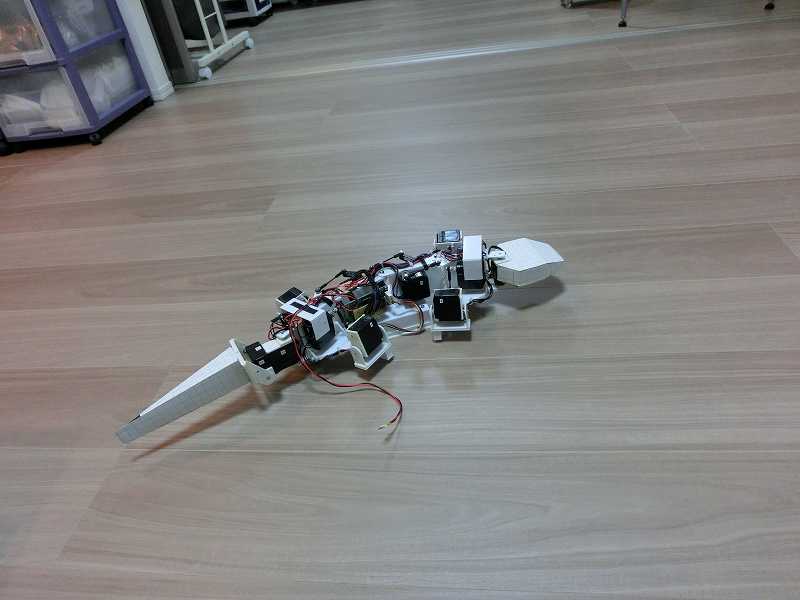
カメの様な形の4L1との違いは、胴体に関節があるので体をくねらせる様に、歩幅を大きめに歩行できる ところと、脚のヨー軸を減らして構造の簡略化を志向してみたところです。材料は、これより前のロボットからのリサイクル 品を使用しました。
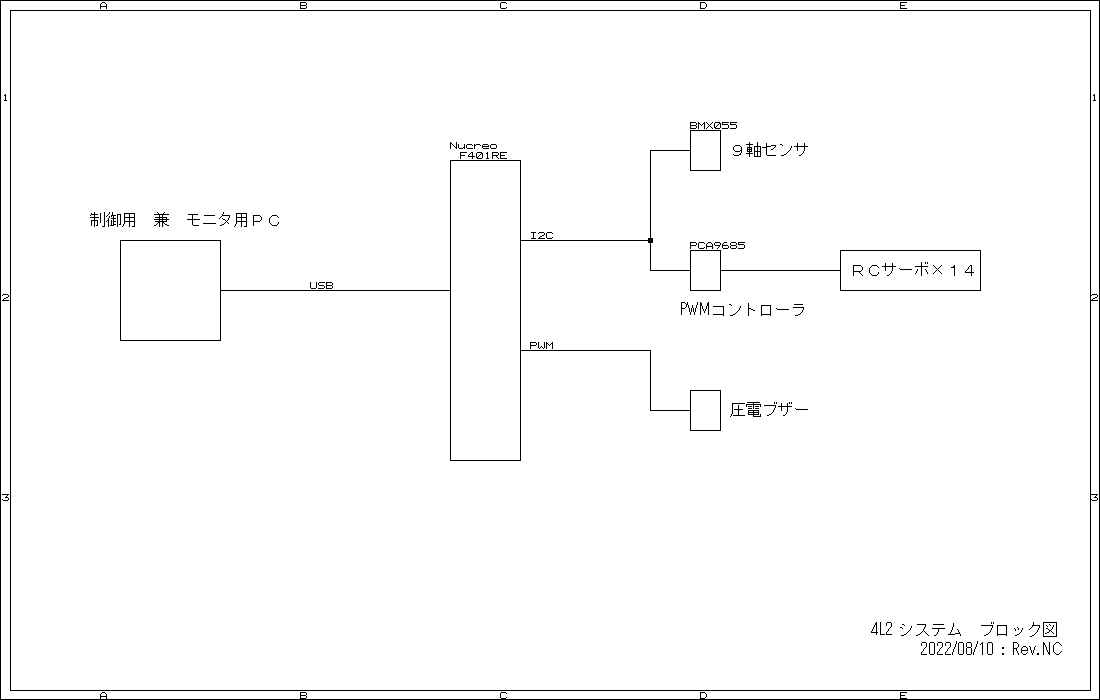
歩行にあたっては、予め計算しておいたモーションデータを使うのではなく、随時逆運動学計算を行って歩行モーションを 生成出来るように、FPU(浮動小数点計算ユニット)付マイコンのNucreo F401RE(Cortex-M4F)を選びました。
| 全高 | 100mm |
| 全長 | 700mm |
| 全幅 | 170mm |
| 重量 | 約1050g(電池別) |
| 自由度 | 14 |
| モーター |
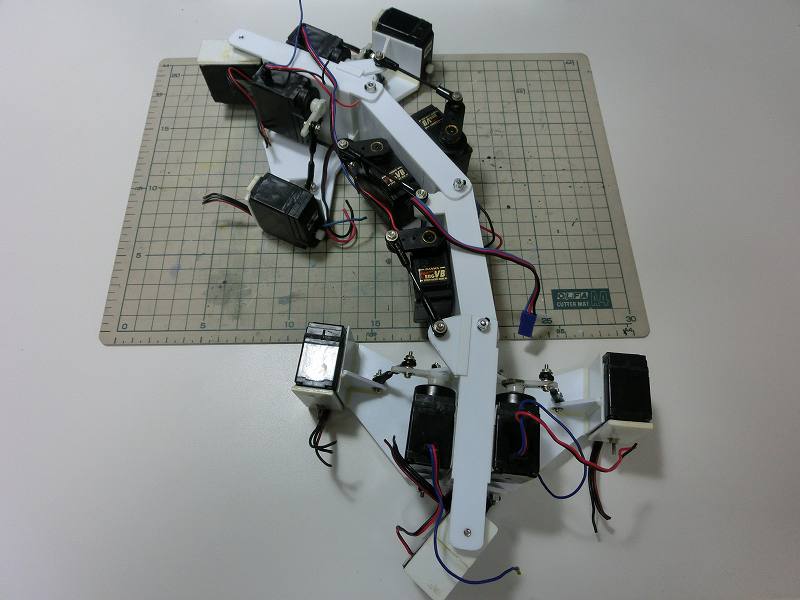
RCサーボ:SANWA ERG-VB×3(胴体), SX-101Z×5, SRM-1301×6 |
| 電源 | 外部電源 |
| センサー |
9軸センサモジュール(角速度、角速度、磁気) |
| CPU |
Windows PC ST Micro Nucreo F401RE(Cortex M4) |
ボディーの総合動作確認
|
 |
|
フレーム構成 4つのセグメントから成っています。 脚にヨー軸が無いのが特徴です。 |

|
|
マイコンボード Nucreo F401RE, 圧電ブザー, 9軸センサモジュール、 I2C信号取り出し用のピンヘッダが載っています。 |