1月中旬に荷造りをはじめた時以来のため、どこで途中になっているかすっかり忘れていたので、製作メモに 目を通すところから始めました。その後の製作は以下のような順番で進めました。
1月中旬に荷造りをはじめた時以来のため、どこで途中になっているかすっかり忘れていたので、製作メモに 目を通すところから始めました。その後の製作は以下のような順番で進めました。


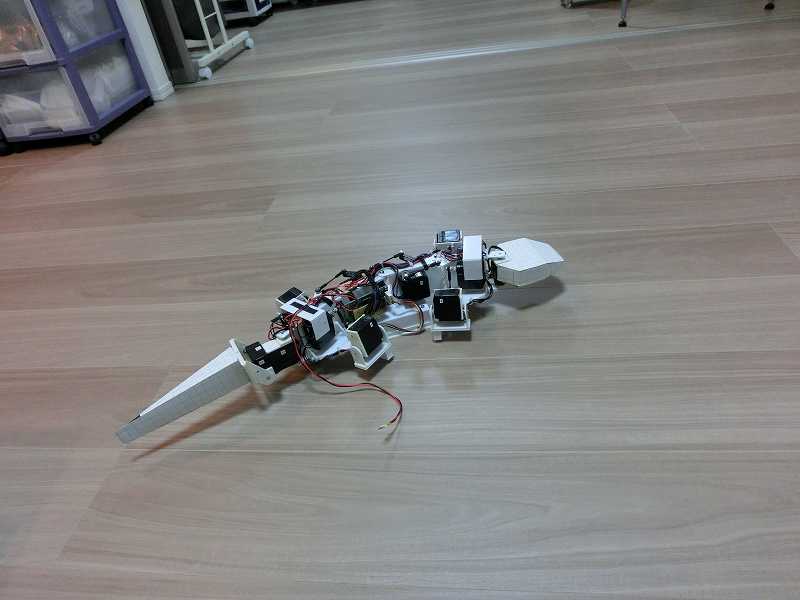
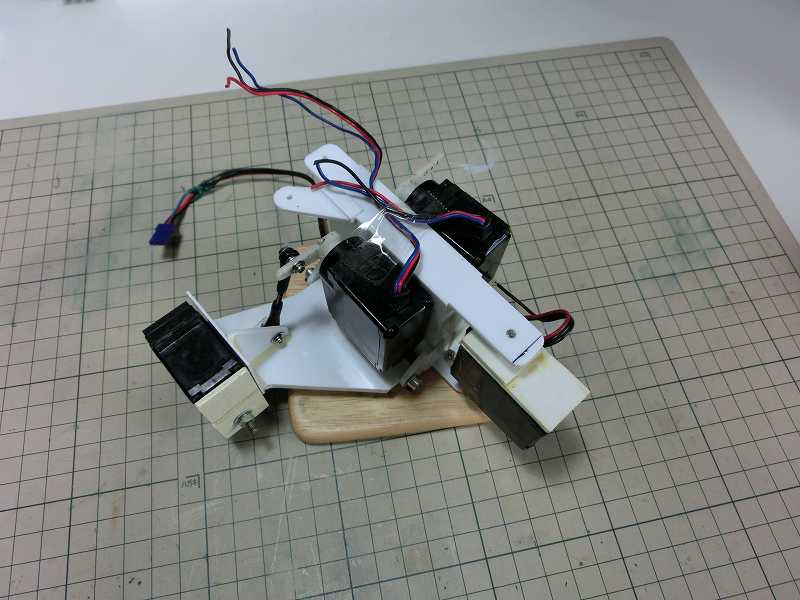
4L2を段ボール箱から出したところ
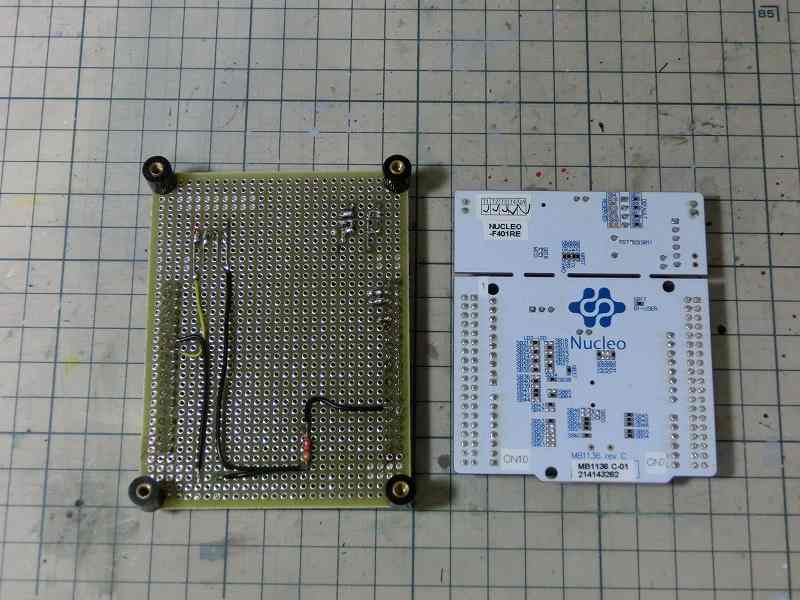
オフラインIDEのMbed StudioとオンラインIDEのKeil StudioをNucreo F401RE搭載の4L2用コードをコンパイル して使い勝手を見てみました。
画面のレイアウト等、とてもよく似ていてどっちでも良いような気がしましたが、オフライン版の方は今日時点でデバッガが 使えたので、しばらくはMbed Studioを使ってみようかな~と思いました。
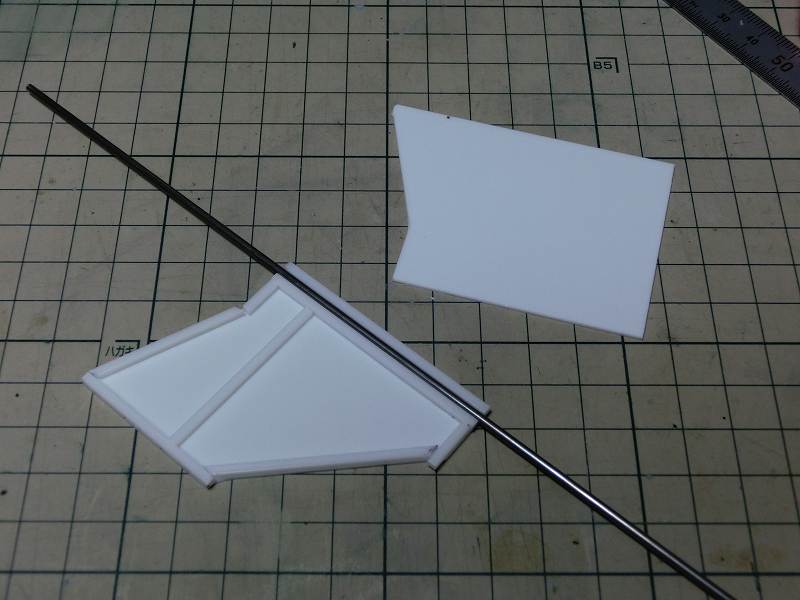
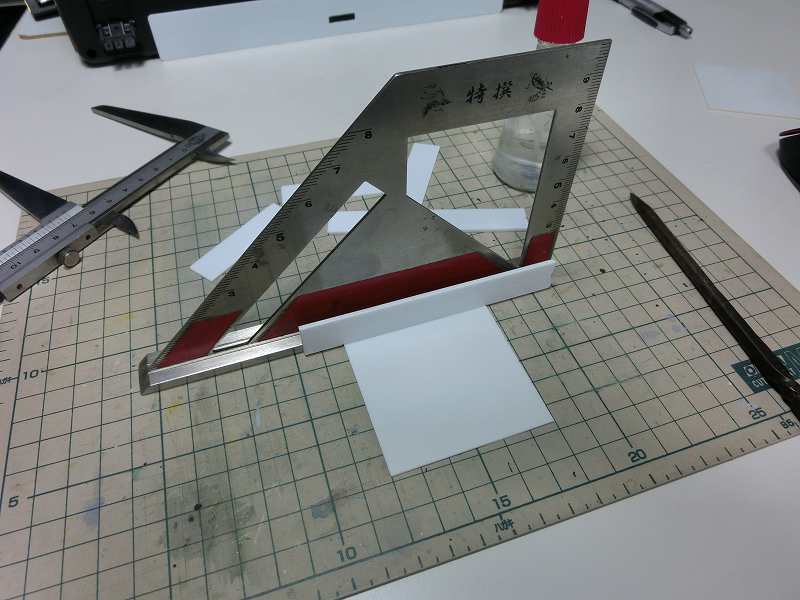
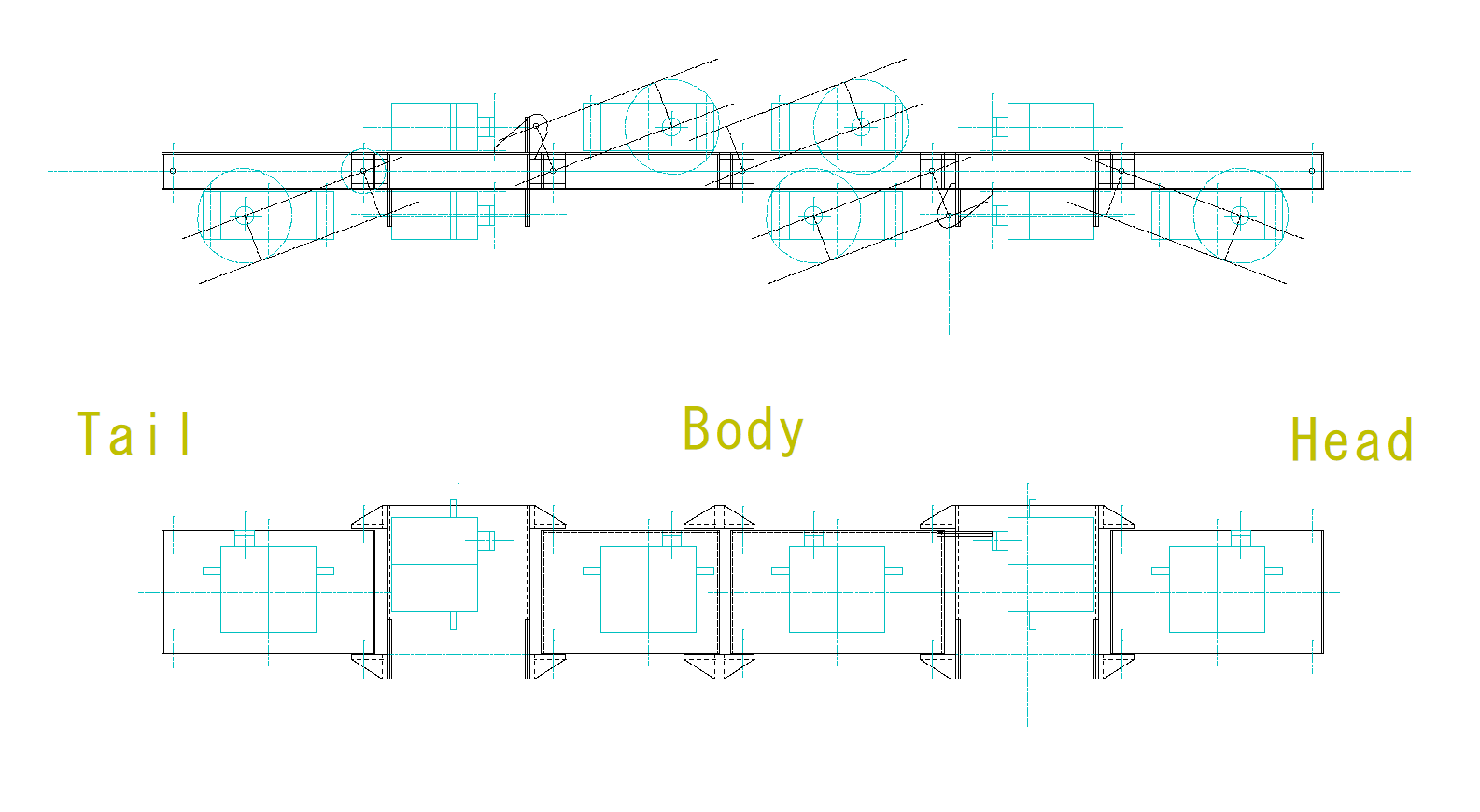
頭と尻尾は、見た目的にバランスを確認するため工作用紙で作ってみました。
この動作確認で以下のポイントを確認し「だいたい思ったとおりに出来てるかな」と思いました。


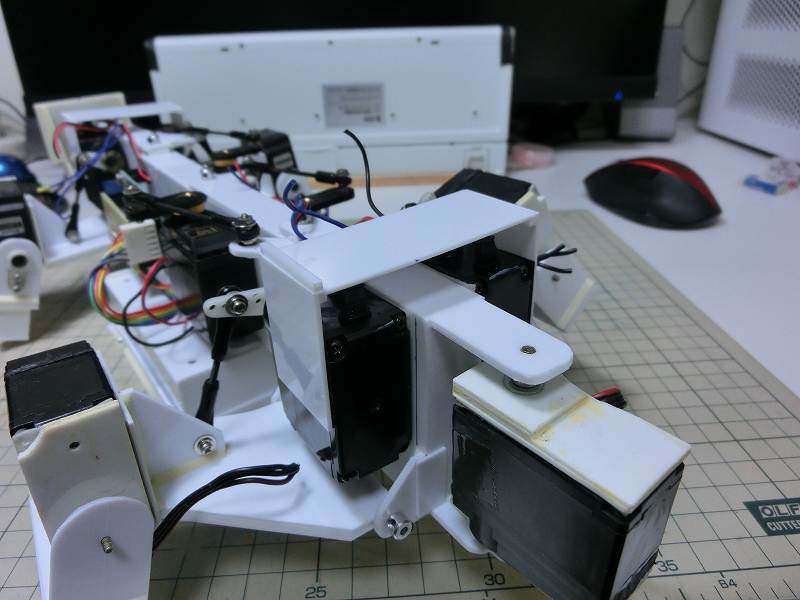
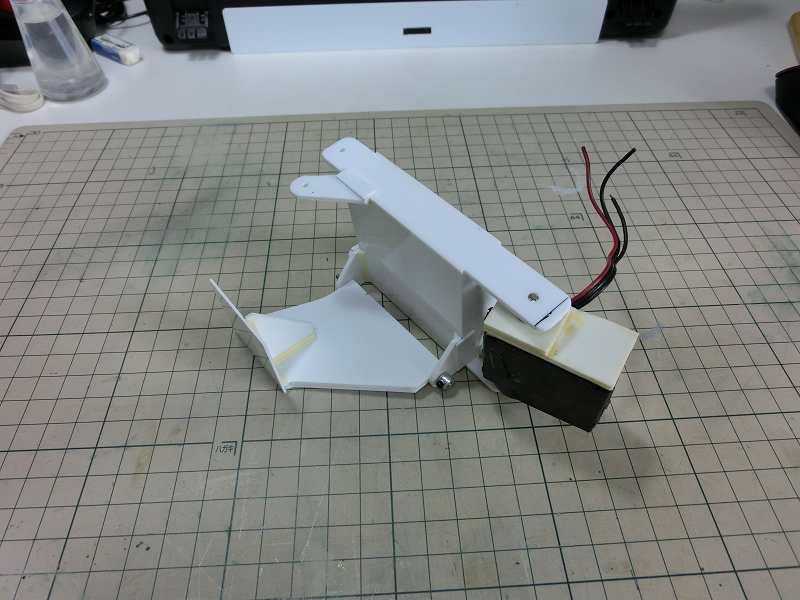
こんな感じで付きます。

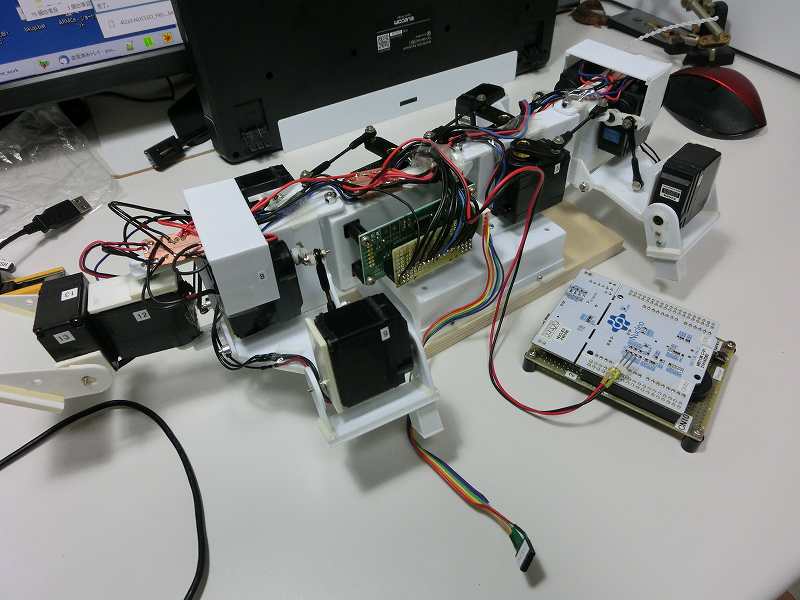
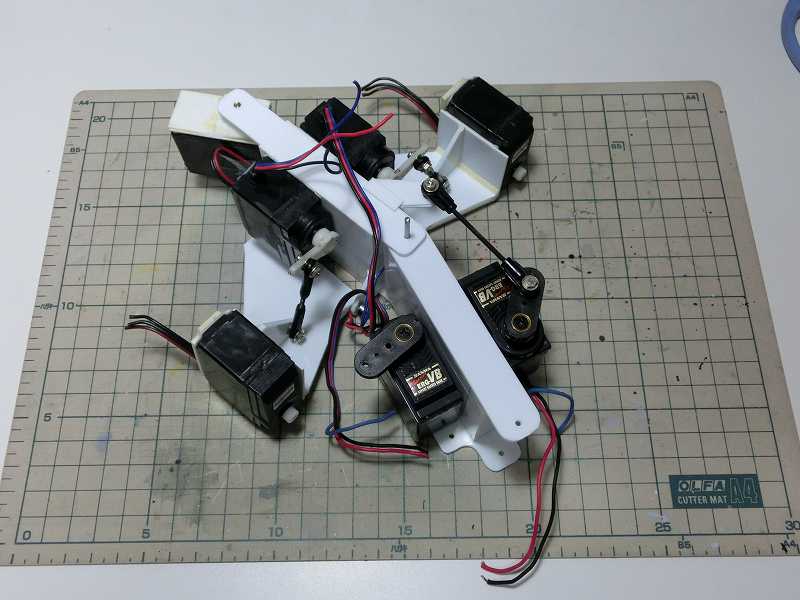
こんな感じで、裏返して置けます。

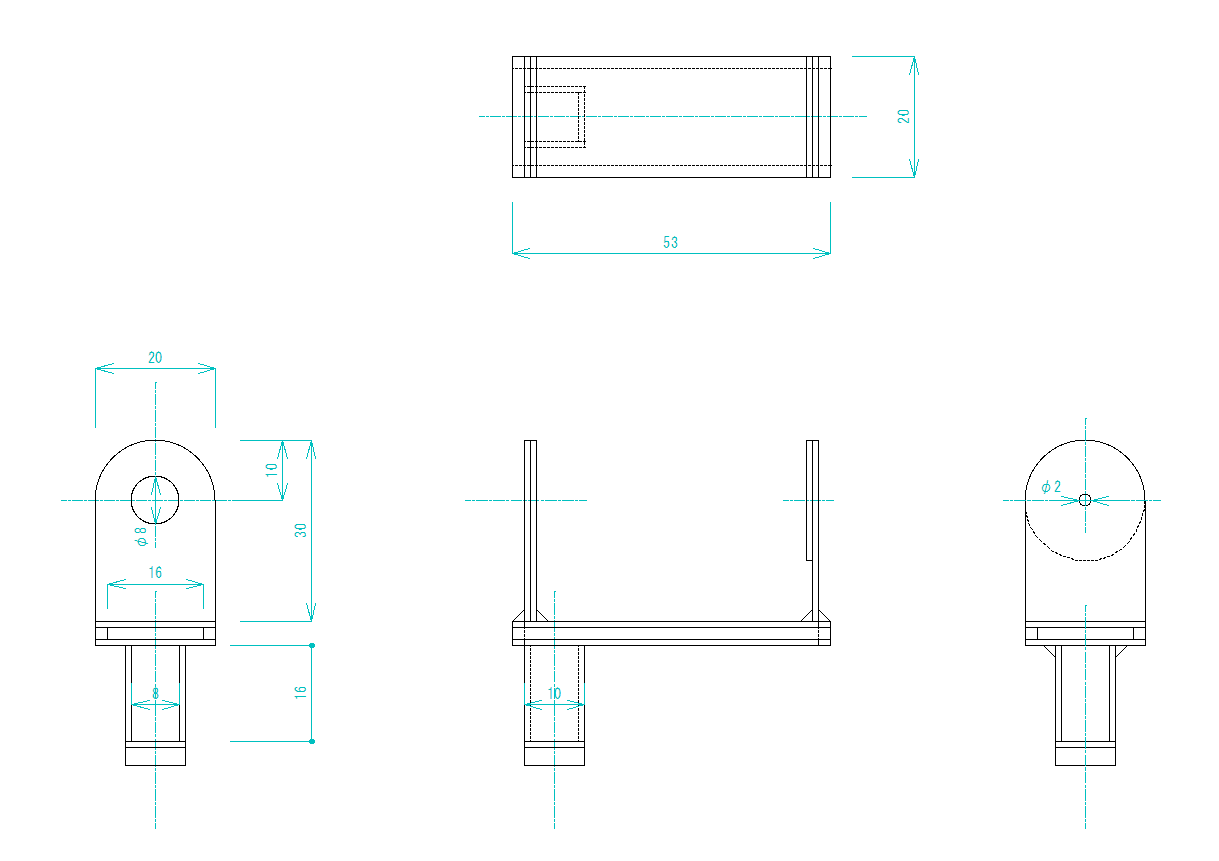
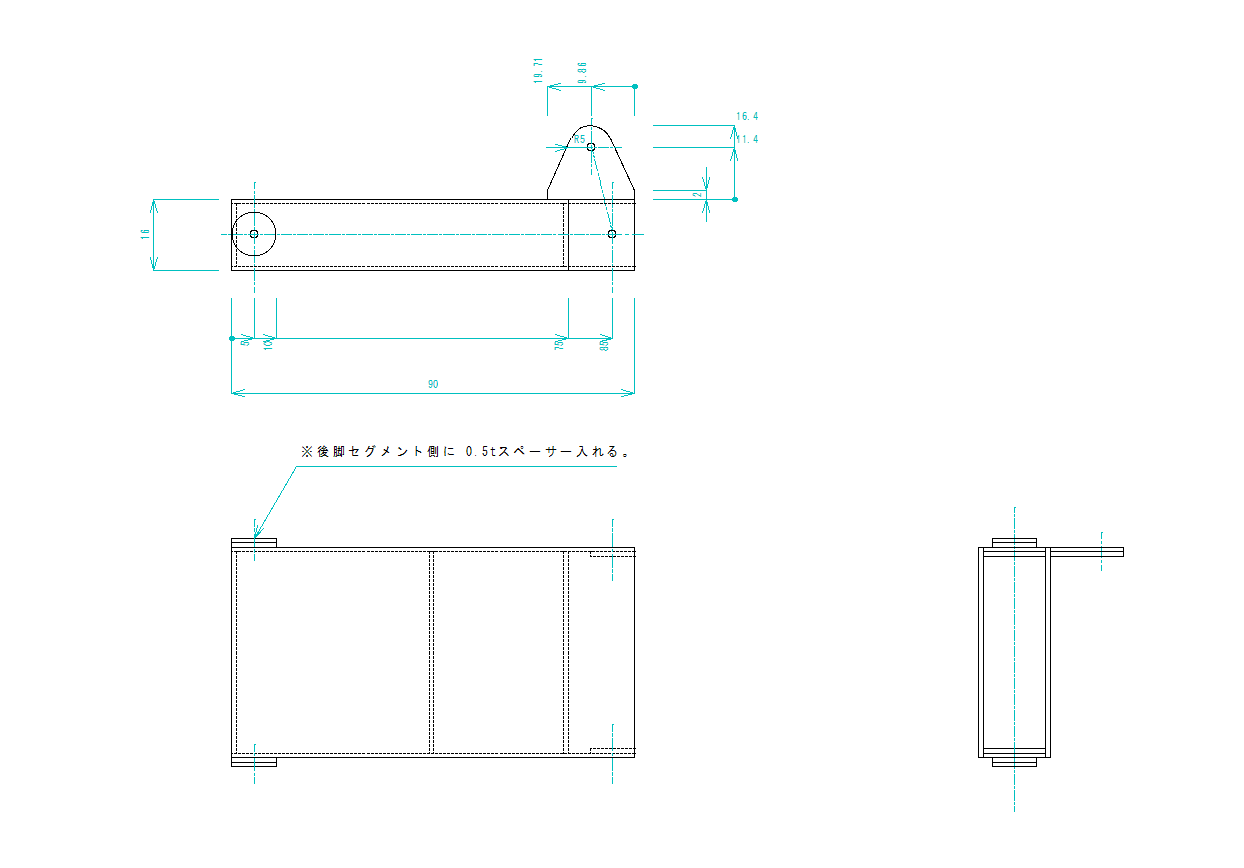
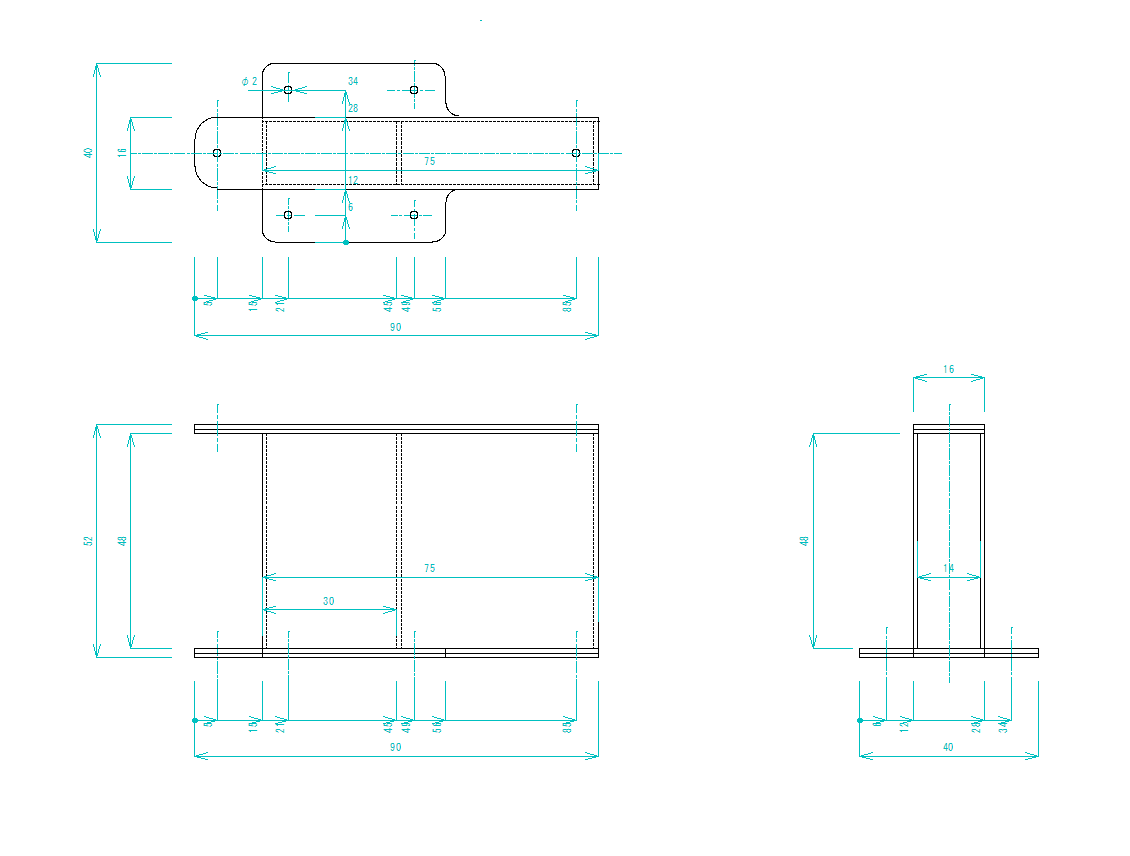
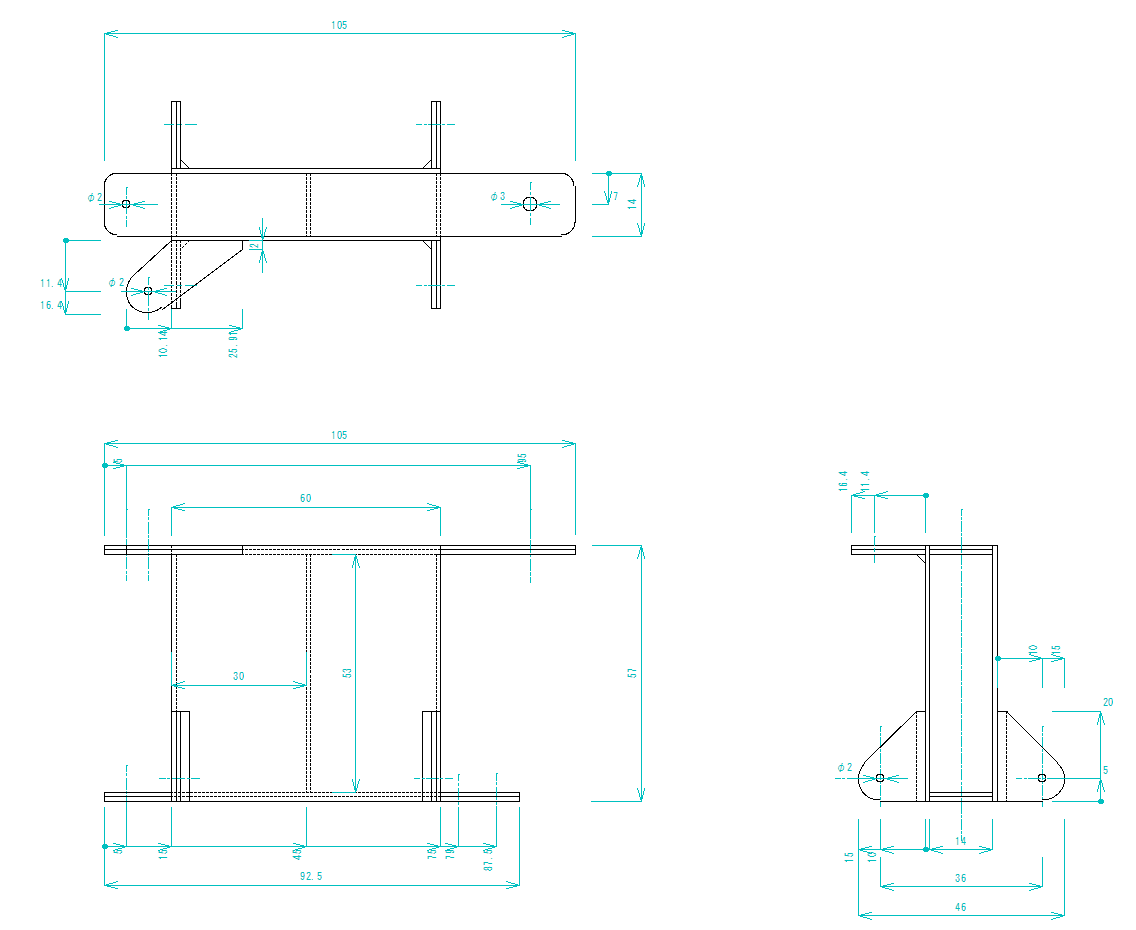
足の図面です。
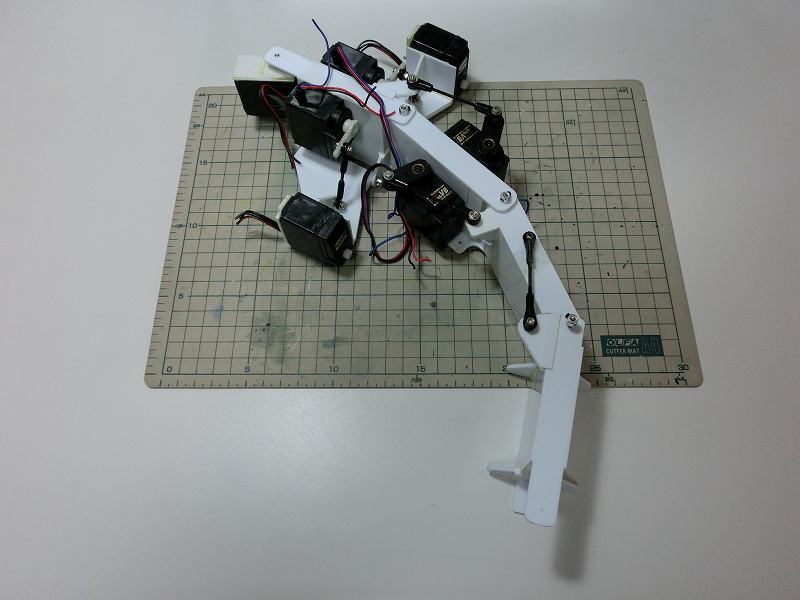
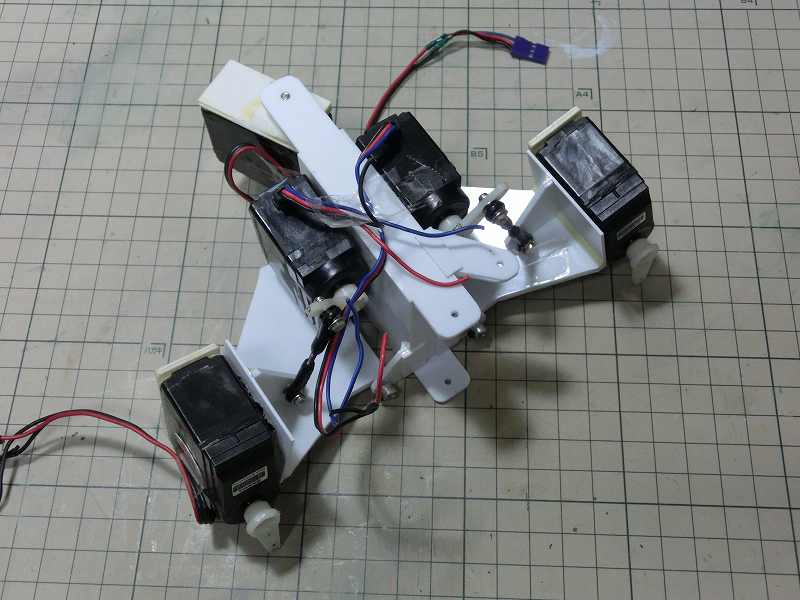
後ろ脚を付けました。ここまでと同じく、A4のカッターマットの上で撮影しました。

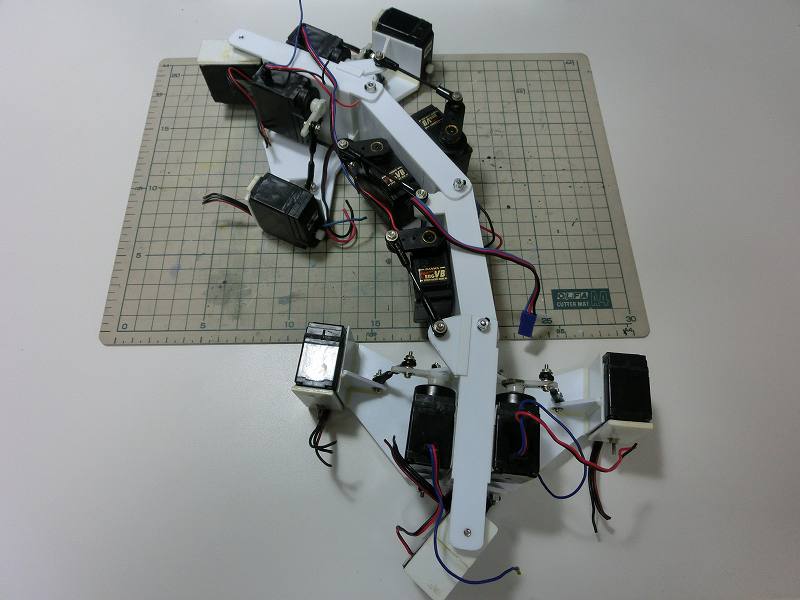
全ての足をつけました。A3のカッターマットの上で撮影しました。この状態で780gです。
どっちが前か分かりにくいので早めに「頭」(飾り)を付けようかと思いました。

大分長くなってきました。リンク取り付け部が強度不足な気がしてきましたが、ゆっくり動かせば
いきなり壊れることはなさそうなので、ひとまずこのまま進める事としました。
脚部セグメントのRCサーボを両面テープの種類を変えて本付けしました。
前部胴体セグメントのRCサーボは、可動範囲などのチェックのため仮付けしました。
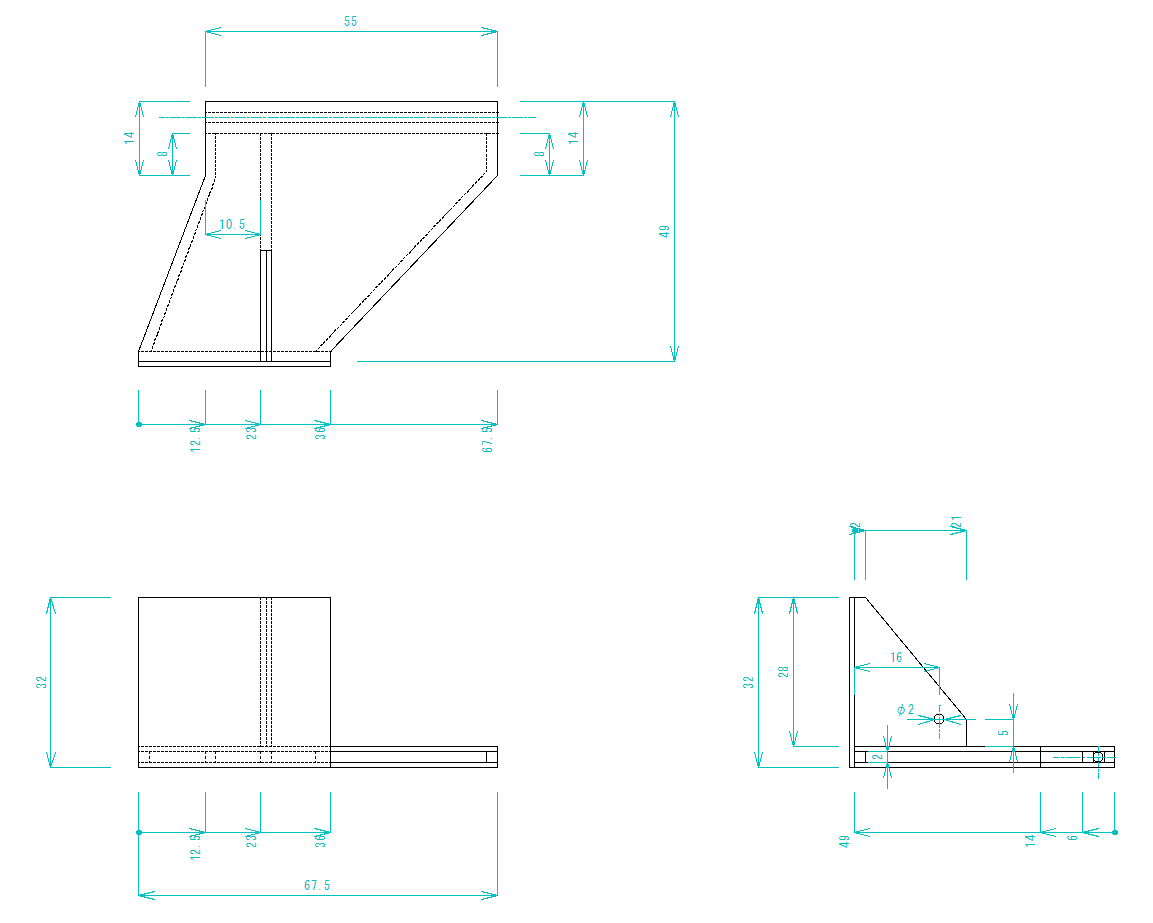
後部胴体セグメントの製作に進むため、図面を詳細化しました。


先週詳細化した図面にそって製作しました。ここは形がシンプルなので、わりとすぐに出来ました。
先週特に問題なかったので、反対側の脚も作りました。
胴体セグメントの製作に進むため、図面を詳細化しました。
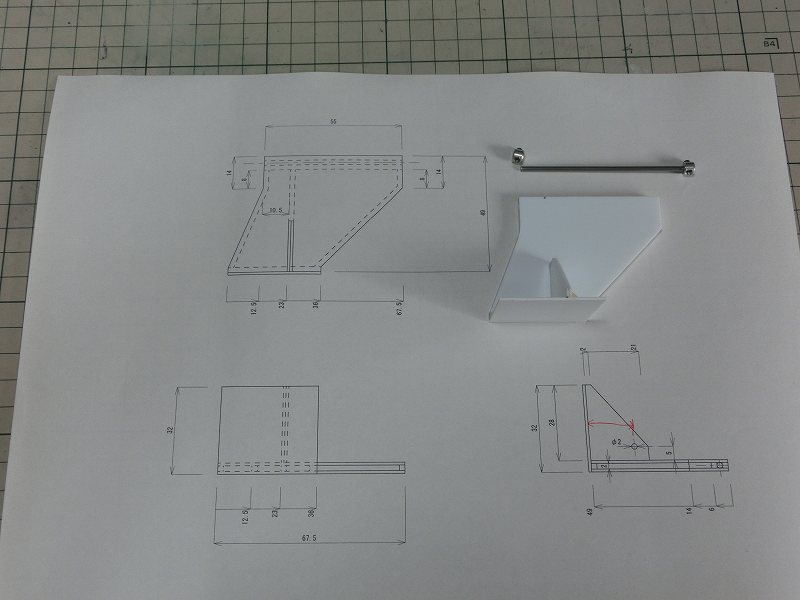
UNIの脚と同じような構造です。シャフトはφ2のピアノ線です。
脚部セグメントに付けてみました。
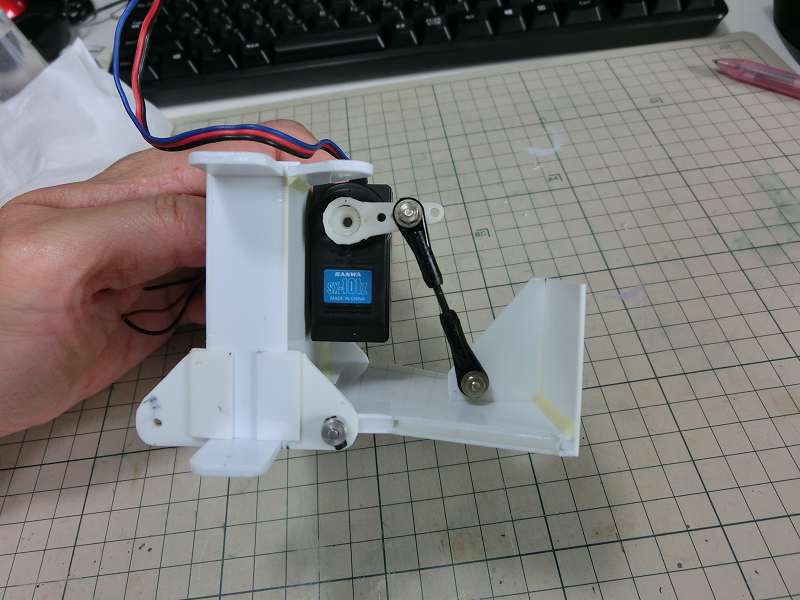
RCサーボを仮付けして、リンクを接続し、可動範囲を確認しました。
他のRCサーボも仮付けして取付に問題ないか確認しました。
ここまでのところは図面通りに作れました。
20年前のRCサーボや、既に変色しているプラ材を使っていると、
はじめからボロい感じになってしまいました・・・ちょっと良くなかったかも。
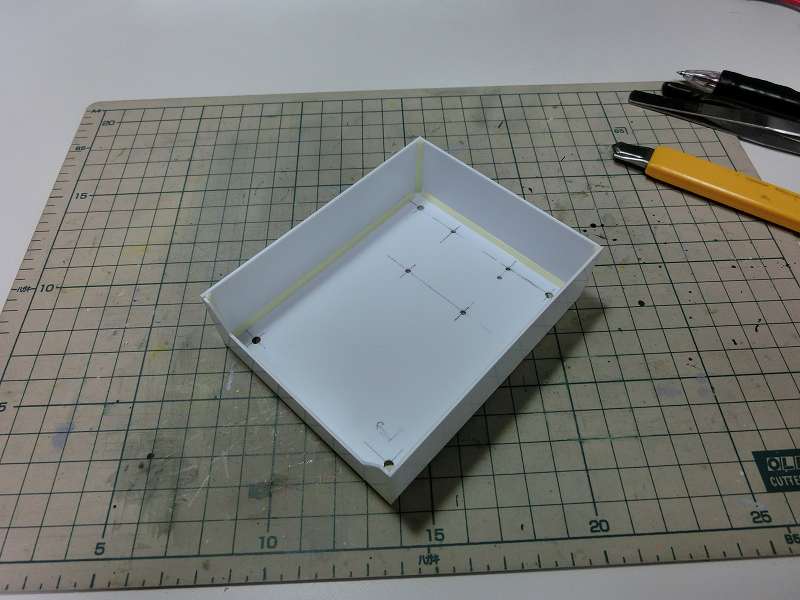
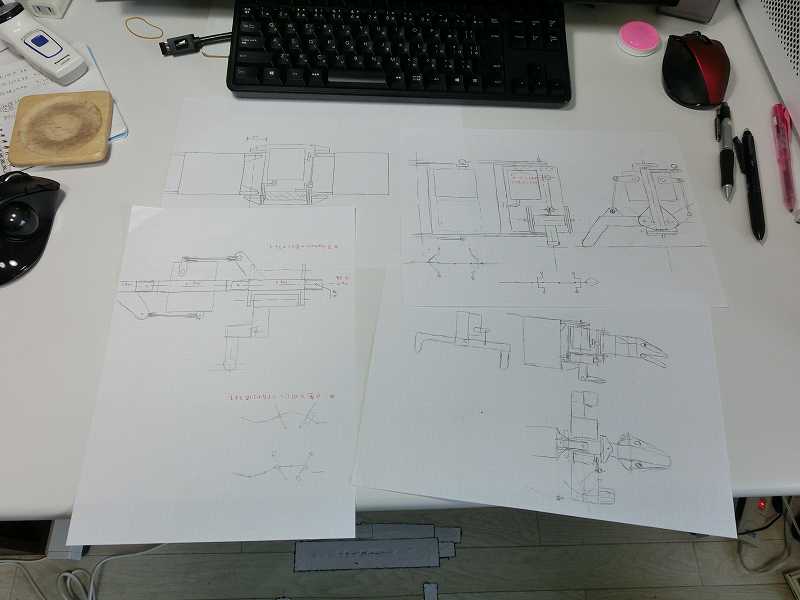
CADの図面として形になった後、プリントアウトに部品番号を付け、プラ板の切り出し用に簡単な部品図を手書きしました。
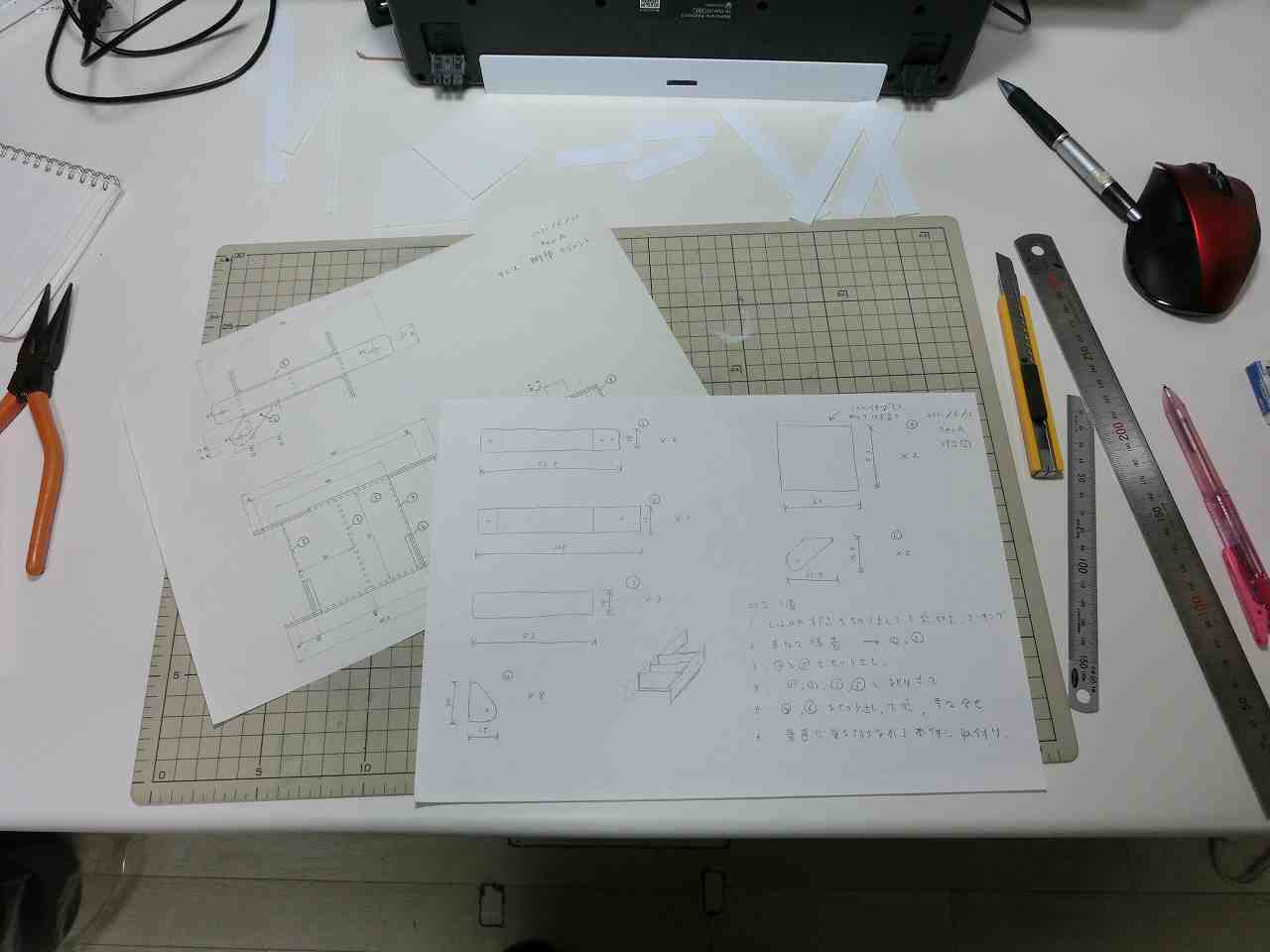
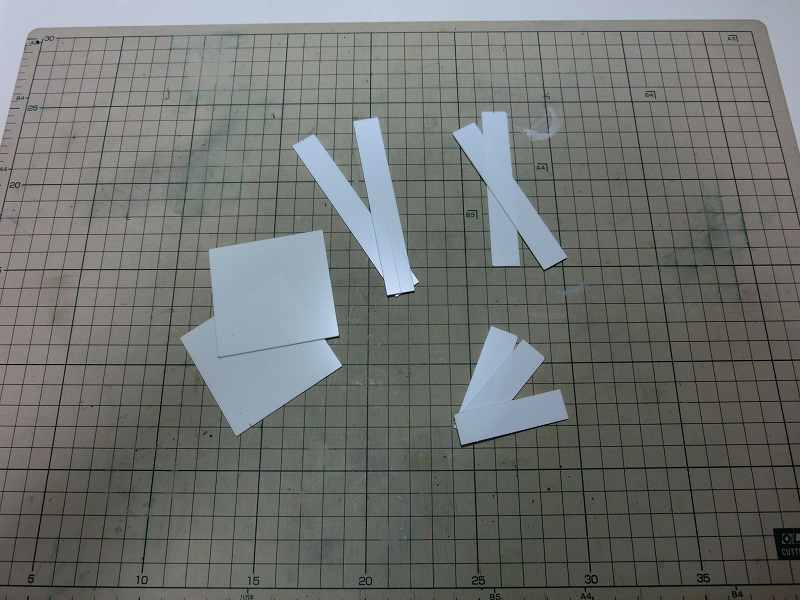
その後は部品の切り出し--->組み立てに進みました。ちなみにプラ板はいつものタミヤ模型製の1mm厚で、接着剤は ラッカーシンナーです。


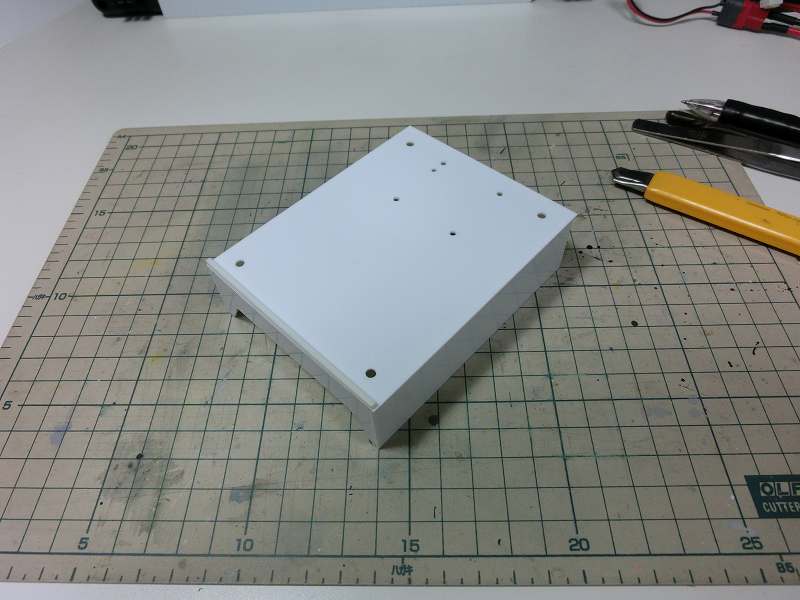
胴体部分が80%くらい完成しました。

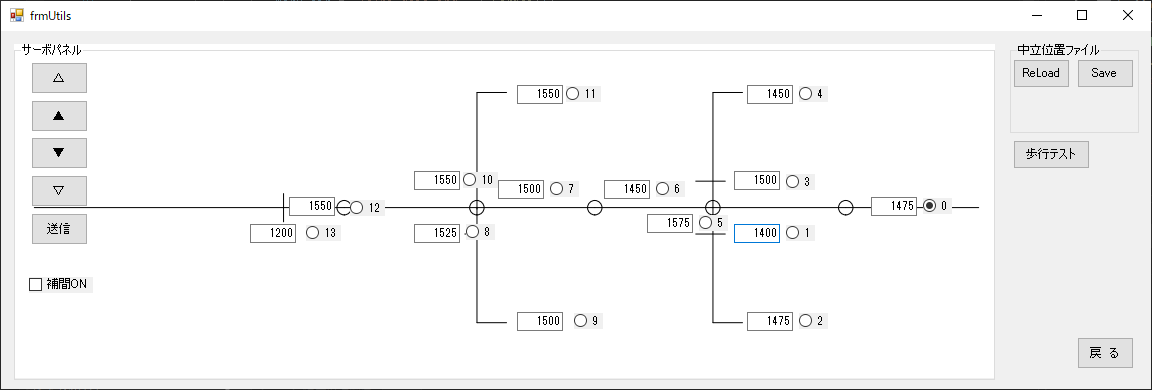
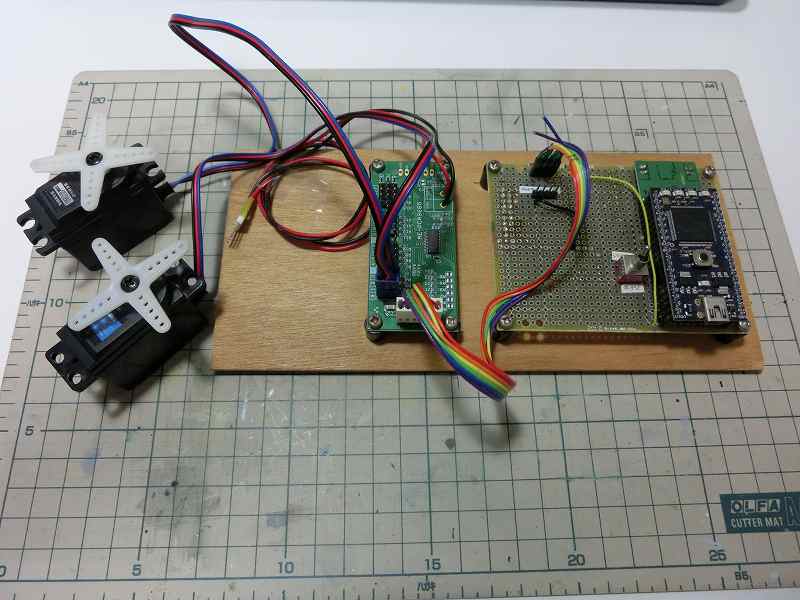
ライブラリの使い方の要領をつかんだ後は、4L2に14個のRCサーボを取り付ける予定なので
14個のRCサーボを接続して動かしてみました。

周期2秒でsin関数からPWMパルス長を作って動かしてみました。4L2へ搭載するにあたり、ここまでのところは特に問題ないようです。
ステップ6:尻尾の形を決めました。RCサーボをストックしている引き出しをかき回していたらW8のアーム関節が
使えそうな感じだったのでスケッチに描き込んでみました。
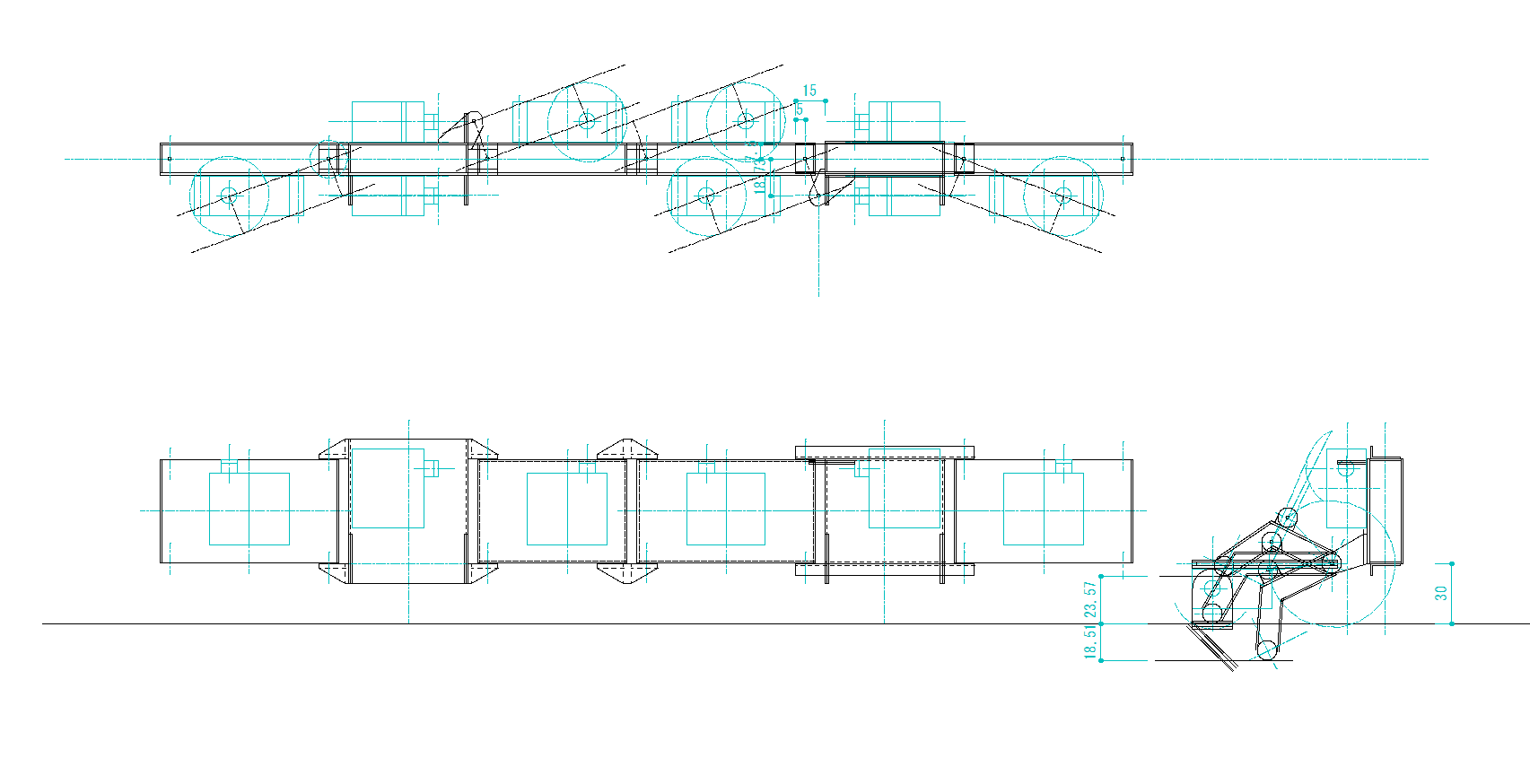
腹側にマイコンボードのケースを付けると、地面との間隔が少し近すぎる気がしたので、足を伸ばしました。
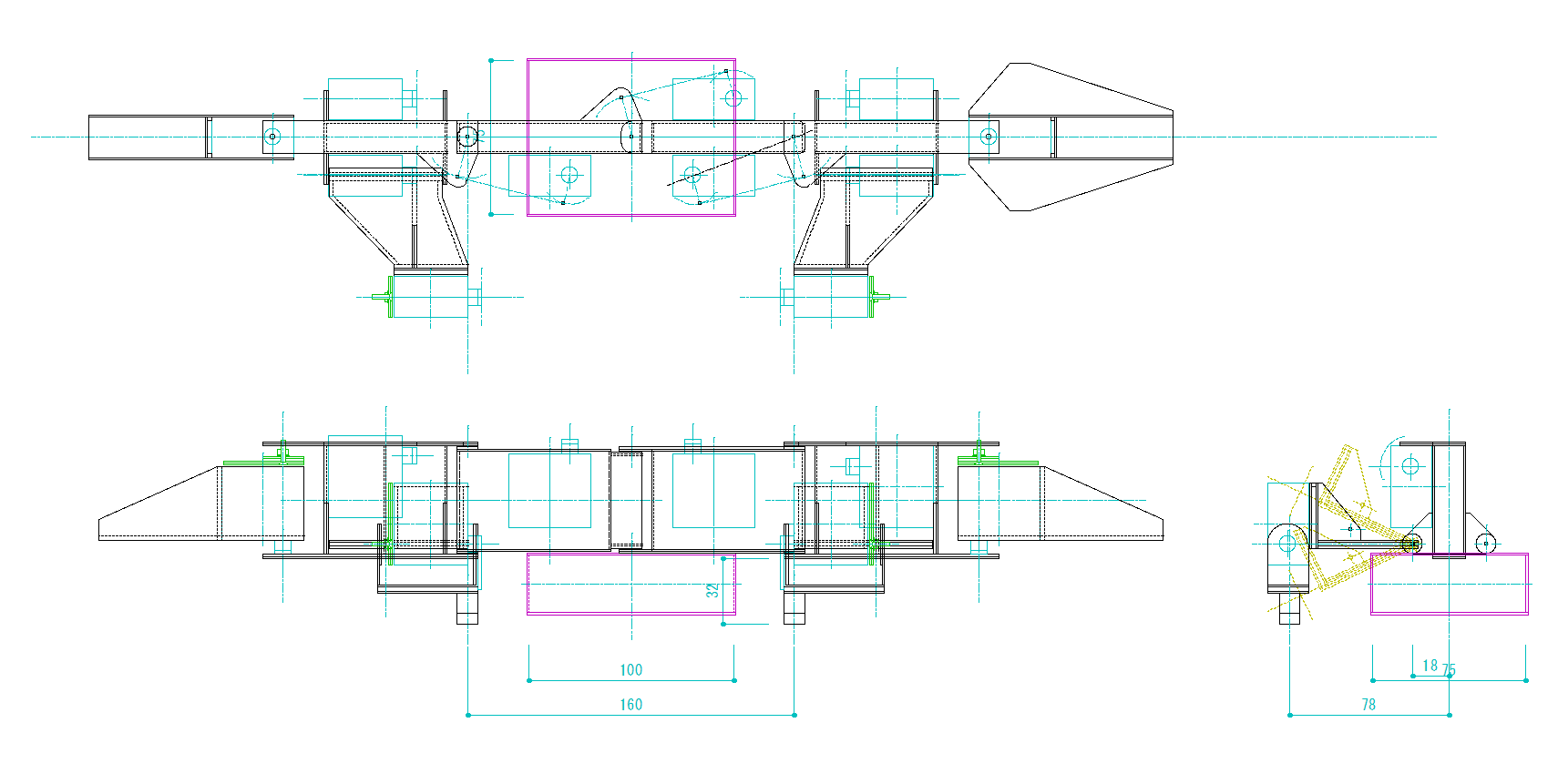
ステップ5:プラ板の組み方を念頭に置きつつ、各関節の寸法を決めてゆきました。
マイコンは、歩きながらモーションデータを計算しなおせるように、Cortex M4のNucreo F401REあたりを
載せる方向で、基板をどこにつけるか検討しました。
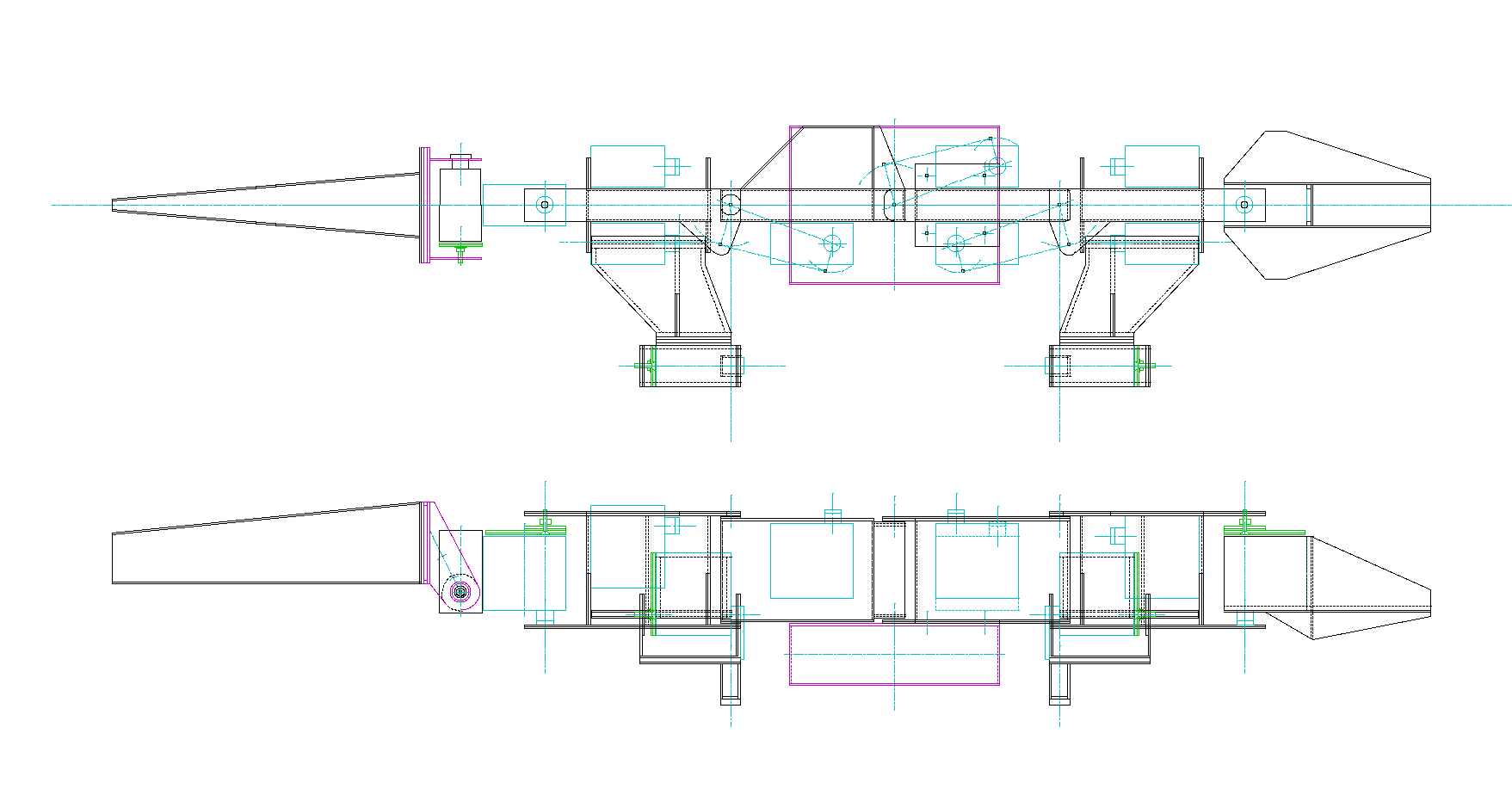
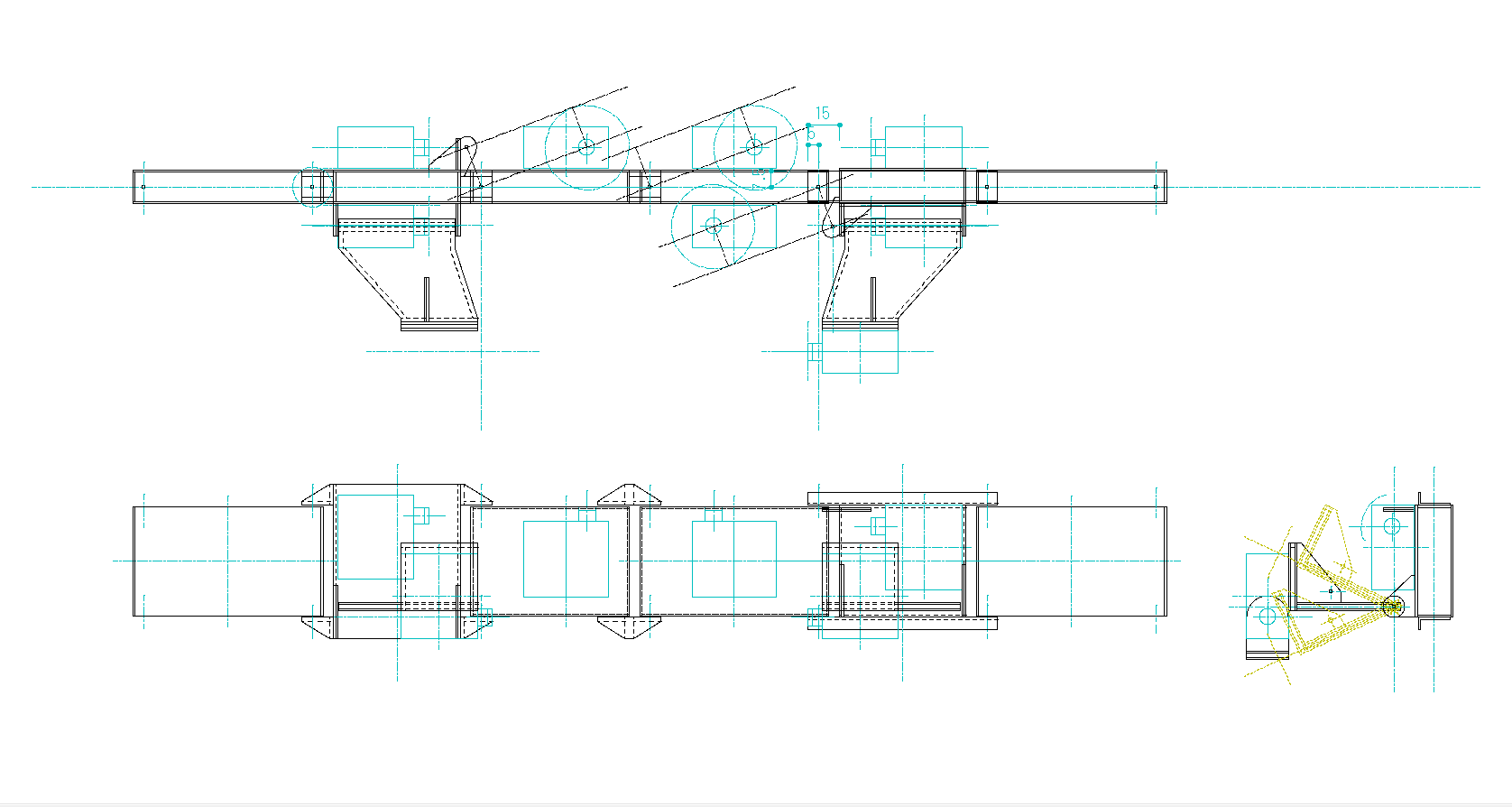
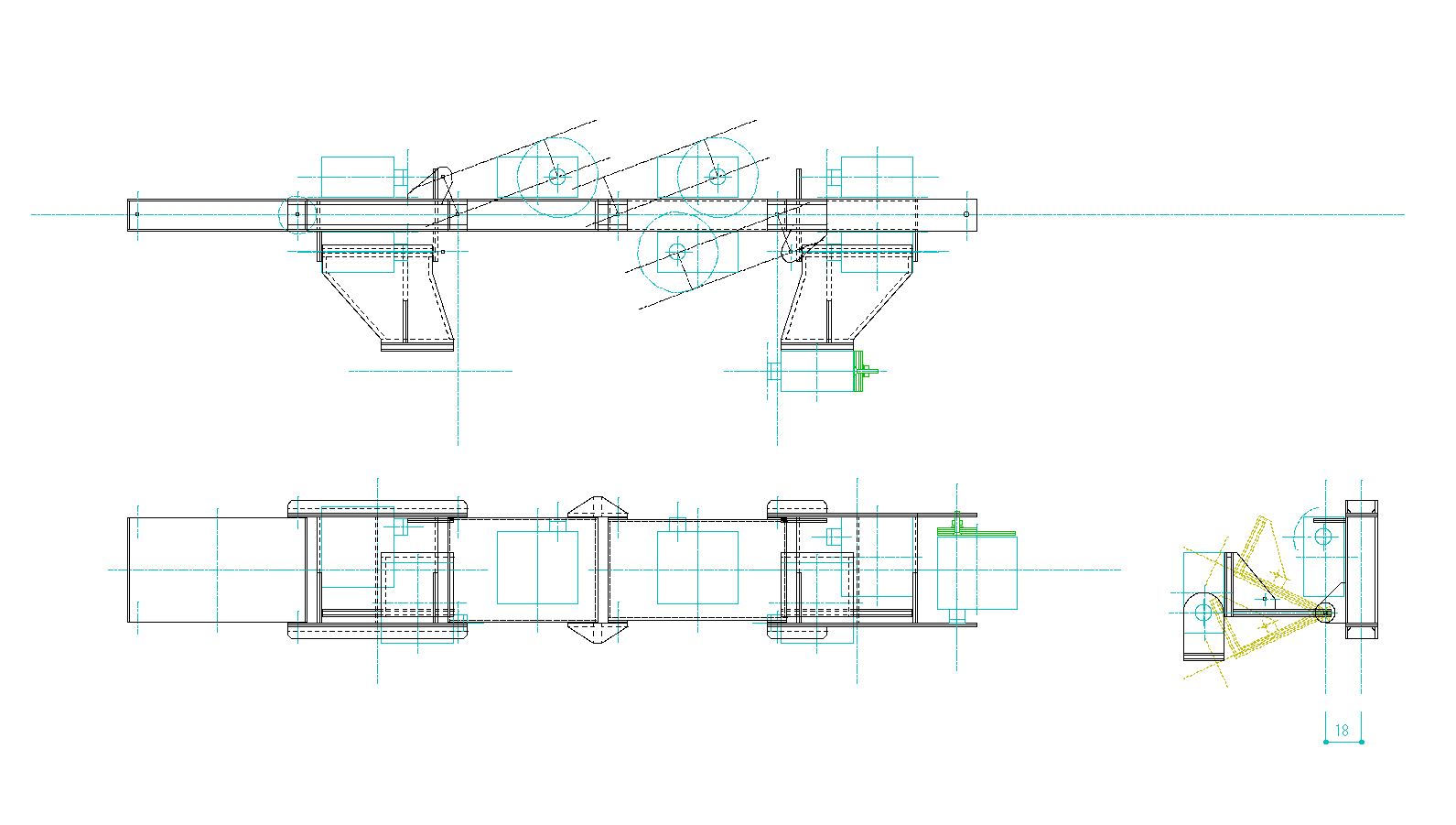
図中に紫の線で描いた箱の場所(体の中心部、腹側)に置く方向で進めることとしました。以下は途中の検討図です。
前部胴体セグメントの幅を広げて、中にマイコン設置用のスペースを作れないか、描いてみました。
構造の作り易さとケーブルの取り回しが今一つな感じでした。
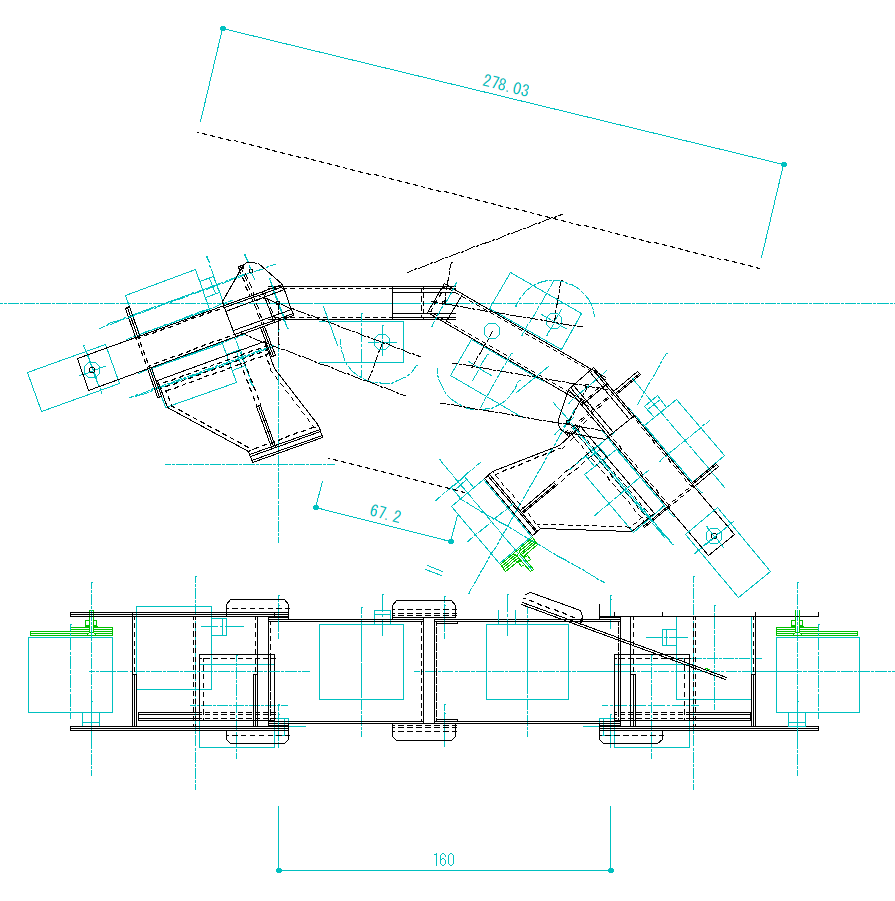
体をいっぱいに曲げたときに干渉が無いかと、一歩でどれだけ進む予定か見てみました。
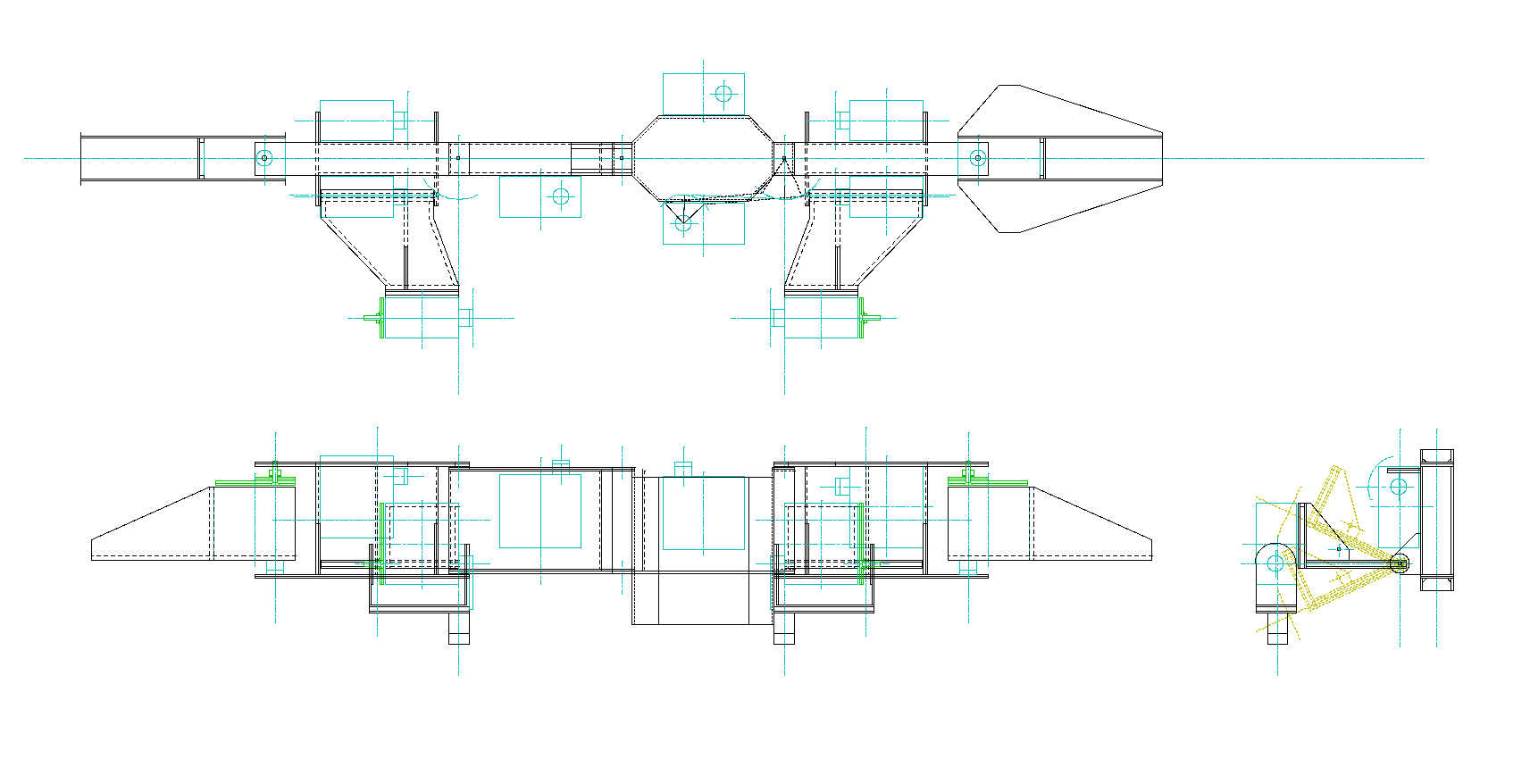
ステップ1:頭、胴体、尾の関節間の距離と関節の大体の形、RCサーボのレイアウトを検討しました。
RCサーボは6L1、4L1で使ったSX-101とSRM-1301(基本的に同寸法)を使う方向で進めました。
購入からいつの間にか20年くらい経っていますが、特に問題なく使えるようです。
ステップ2:前脚セグメントの関節の構造、脚の可動範囲、脚の構造を検討しました。
スケッチでは、脚は1自由度で考えていましたが、歩行時に足先をスリップさせるための抵抗が大きそう
だったので、トルクの小さなRCサーボを採用することも考慮して、2自由度に方針変更しました。
足先は上下に約20mm動き、脚1本当たり800g程度の重量を支えられる様に、脚とリンクの長さを調整しました。
構成は4L1に近いので、全備重量1600g程度と想定して進めます。
4L1同様、体を一番下げた状態で、腹を接地し、体重を支えるRCサーボを休められるように考えました。
ステップ3:脚の構造を検討しました。肩から肘まではUNI/Pen4の脚の構造に近い形を採用しました。
手間を減らして作るため、前脚セグメントと後脚セグメントは同一構造としました。
ステップ4:肘と首の関節構造を検討しました。ここもUNI/Pen4の膝関節の構造に近い形を採用しました。
胴体セグメントと前後脚セグメントの間の関節の構造を、もう少し作り易くて丈夫なように煮詰めたら作り始める予定です。
図の中にマイコンやバッテリー等が出てきませんが、重量配分を考えながら適当に付ける予定で考えています。
尻尾の構造と役立て方については、大型のトカゲが歩く様子を調べつつ考えています。方向としては、
常に地面に軽く接地していて、歩行中の足間の重心移動を補助することを考えています。
今のところは、あり合わせの材料でトカゲタイプの歩行ロボットを作ろうかな~と思っています。