メカ全般のページ
全体的な設計の方針
全ての部分を、なるべく軽量かつ十分な強度を持つよう留意しました。
(ラジコンの飛行機を作る気持ちに近い感じです。)
今までに3回ほど、転倒防止フックをかけ忘れて、まともにコケていますが、
壊れていません。
ヒザが曲がる方向は、人間タイプと鳥タイプのどちらにするか迷いましたが
何となく人間タイプにしました。
大きさと重心
振り子の周期とサーボの反応速度の関係だけ計算して、それらしい形に作りました。
(およそ地面から30cm近辺に重心があれば、載せているサーボの速度でも
次の一歩に間に合うとみました。v5では23cm近辺に重心があります。)
重量配分
文献をあたってみると、全身にアクチュエーターが分布していて脚を動かしたときの
反動を無視できないタイプと、鳥のように重量物が脚の上に集中していて脚の反動を
無視できるタイプがありました。
計算の簡単さよりも、機構的な作り易さを重視して前者の方を採用しました。
ひとこと
各関節から関節までのエレメントの剛性は高いのですが全体としては非常に剛性が低いです。
電源オフの時に手で持つと「糸の切れた操り人形」の様です。そんなわけで、
作っているときは「こんなので平気なのだろうか?」と心配でしたが、いろいろと調べてみると
2足歩行ロボットとは概してこういう物のようです。
構造材料
主に1mm厚の田宮模型のプラ板を使っています。
一部の軸周りと、サーボマウント金具がアルミです。
サーボ取付金具とボディーは2mmの木ねじで固定しています。アルミとプラスチックの接着には
合成ゴム系接着剤を使っています。
関節の構造とサーボのマウント方法
可動範囲の考え方
平坦な場所を歩く場合、各関節はそれほど大きく動かす必要は無いと考えました。
そこで、関節駆動トルクと位置決めの分解能を優先して、足首の1関節以外は
リンクで駆動しています。(v1~v3は全関節にリンクを使用)
サーボから関節に接続するリンクは当初田宮のRCカー用の物を使っていましたが
遊びが大きいので京商のRCヘリコプター用の物と交換しました。両方とも
ボルト径が2mmなので簡単に交換出来ました。
何故RCカーの部品を選んだかというと、1980年頃に持っていた田宮の
「カウンタックLP500」のスペアパーツとしてジャンクボックスに余りがあった
というだけです。ヘリコプター用のがちょうど良いサイズと値段であることを早く
気が付けば良かったと思いました。
軸受けの構造
板厚が1mmの軸の周りは0.5mm厚のアルミ板で補強してあります。
板厚が2mmの軸の周りはアルミの補強はありません。
田宮の「楽しい工作」の3mmシャフトを3mmのキリで開けた穴に
通しています。
この構造で高速回転する軸受けを作ると「あっ」と言う間に
ガタが来てしまいますが、1回数十秒ほどのテストを散発的に行うだけですし、
回転数は25rpm相当と非常に遅いので、データを取り終わるまでもつだろうと
予想しています。
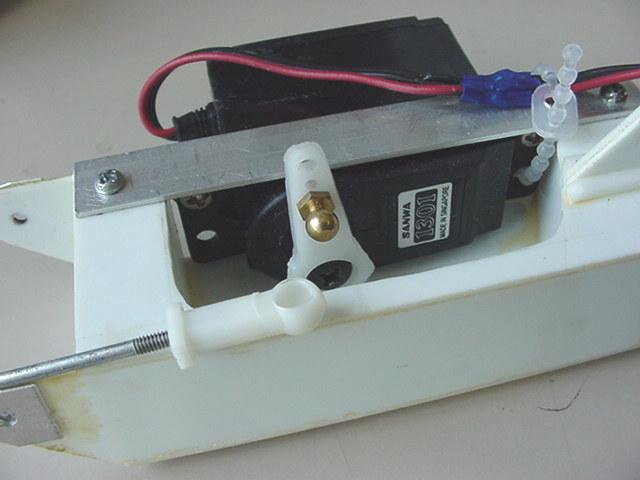
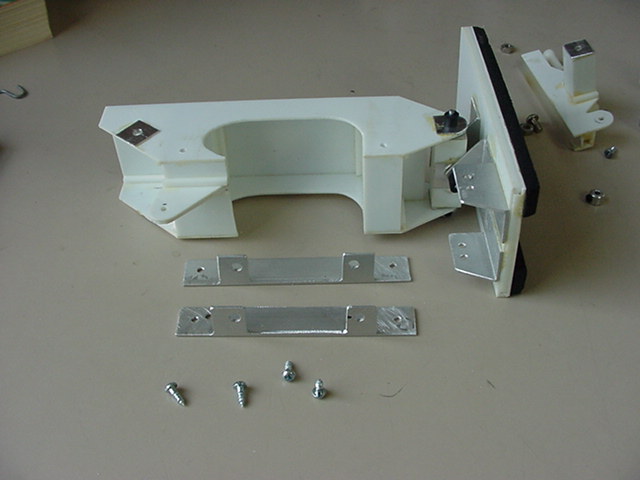
サーボのマウント方法
下の図のような金具を10X10X1のアングルから作りました。


写真はv2とv3の足首を動かすサーボのマウント金具です。
サーボモーターも構造部品と見なした設計になっています。
2足歩行ロボットのトップページへ戻る
ホームへ戻る