車両型ロボット アース・ローバー01の製作日誌 その1
製作の区切りごとに、古い物から新しい物の順に書いてあります。
2009.05.06
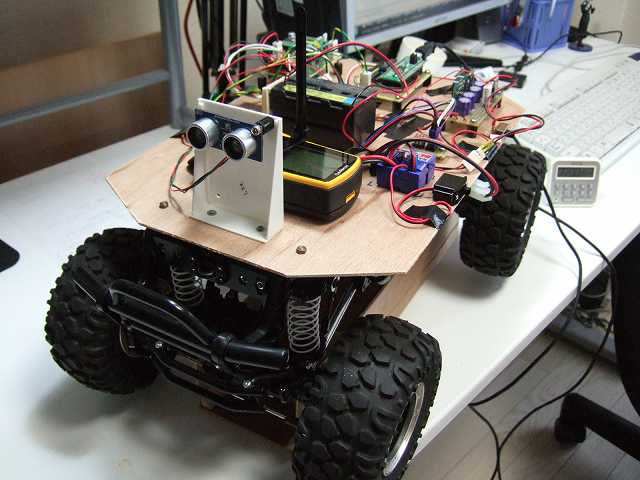
移動ユニット Type3?
外でロボットを動かして遊ぶ時の移動ユニットとして田宮模型の1/10ラジコンカー
「ランドクルーザー40」を買いました。
製品HP
のムービーにあるように、岩場をゆっくり
走らせて遊ぶ車なので、ノーマルの540モーターでも人が歩くくらいのスピードで走らせられます。
加えて4WSで小回りも利くし、ラダーフレームの上がフラットで、コンピュータや外界センサなどを
マウントしやすそうなので選びました。なにはともあれ、GPSを使った遊びから始めるつもりです。
せっかくなので、ラジコンとしても遊べるように考えて改造しようと思います。

パッケージ
キットと無線機(プロポ)、バッテリー、充電器をセットで買いました。選んだプロポセットには、電子式のモーターコントローラー
(今のラジコン用語ではESCと呼ぶようです/昔の通称「アンプ」)が付いているので、コレを使うとマイコンからRCサーボを制御する要領で540
クラスのモーターを回せます。


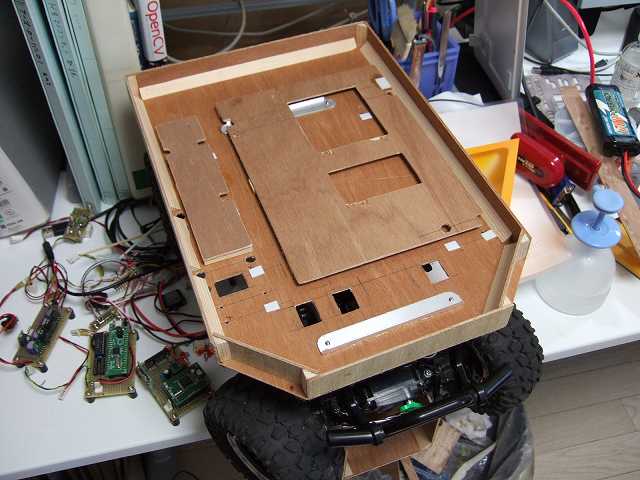
シャーシ
小学生の頃に遊んでいた田宮の「カウンタック」のシャーシはとってもシンプルで、ラジコンカーと言えば
ああいったメカの印象があり、すぐ組みあがるだろうと思って取り掛かったら、二日半かかり、ネジを締めるのに、手が疲れました。
樹脂製の部分が多いので、大きさの割りに軽かったです。(約2.3kg)
材質と言えば、大きな力がかかるプロペラシャフトまで樹脂製なのには驚きました。ギアの類が樹脂製のケースに密閉されていることと、
稼動部分に樹脂性部品が多用されているせいか、昔のラジコンカーと比べると、動作音がすごく静かでした。その他、樹脂の自己潤滑性を
期待した設計の様で、稼動部分が多い割には組立て途中で注油の指示のある場所が少なかったです。
2009.06.07
新カメラ
2009.06.15
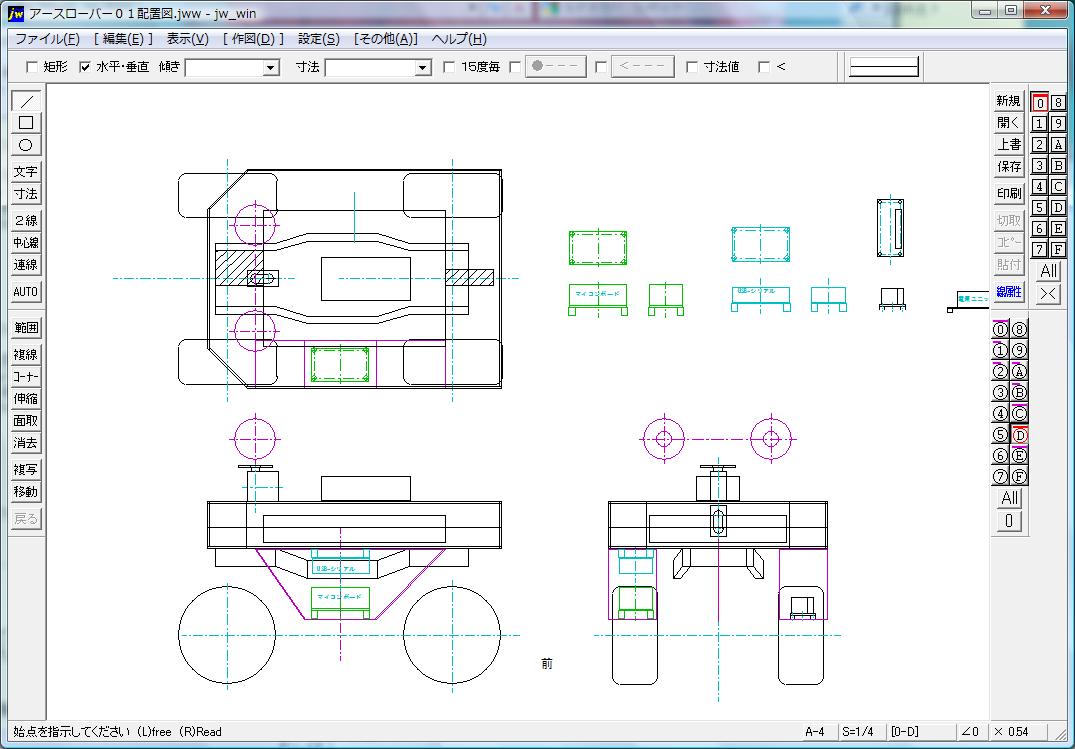
レイアウトの検討
2009.06.15
システム構成の検討

システム構成(案)
大体こんな感じで考えています。手足は無いのでRCサーボの数が少ないです。
デッキの製作
2009.06.28
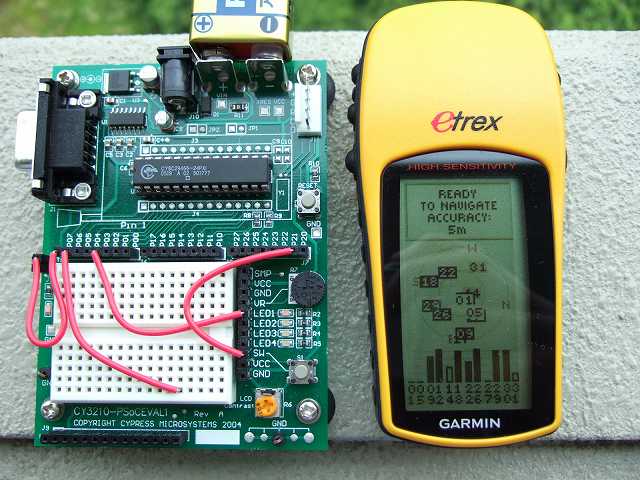
GPSとマイコンの干渉確認テスト
去年の5月にW6で確認済みですが、間違えが無いか再度確認しておきました。
下の写真のように動作中のマイコンボードとGPSを並べて、受信状態の画面で
いくつ衛星を捕捉出来たかと、それぞれの衛星の電波の強度を見ました。

やはりH8/3052Fのボードは全くダメで、H8/3664Fのボードはけっこう良かったです。
写真に写っているPSoC 評価ボード(CY8C29466付き)の影響が一番小さかったです。
やっぱりCY8C29466を使おうか・・・と迷いましたが、I/O点数が足りない気が
したのでAKI-3664フラットマイコンキットを使うことにしました。
H8/3664Fでもやはり受信感度は落ちるのですが、マイコン周りに特別シールドを
しなくても、まあなんとか使えそうな感じです。

AKI H8/3664FとI/Oボード
マイコンを決めたので、回路図を描いて作り始めました。
2009.07.05
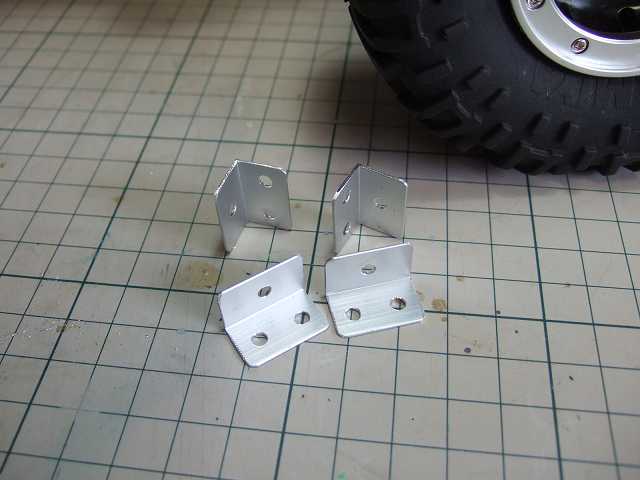
車輪エンコーダ取り付け
基本的に走行距離はGPSを拠り所にしようと考えていますが、搭載予定のハンディGPSを
持って歩いていると、10m程度までの範囲で位置が飛ぶことが良くありました。そこで
数十メートルのオーダーの範囲では車輪の回転数から検出した走行距離とGPSの測定結果
をつき合わせて現在位置の判断に使うため、車輪に回転検出用のエンコーダを取り付けました。

センサの取り付け状態
野外を走行することによる太陽光の影響と、ほこり等に対する対環境性を重視して、ホール素子
を利用した磁気近接スイッチを選びました。機種はPanasonic製AN9027で
データシート上の検出距離は2.5mmです。磁石は大きさが5mmほどのネオジウム磁石です。

センサと磁石の取り付け状態
車軸のガタがけっこうあるので、センサの検出距離を越えないけれど、磁石とセンサがぶつかることも無い
ような位置に調整するのが大変でした。
2009.07.12
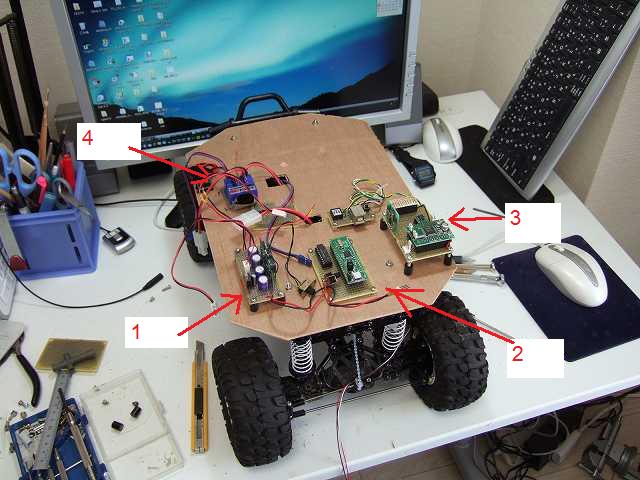
基板等の位置決め
2009.07.19
動作確認
2009.07.26
USB-シリアル変換ボードの配線
USB-シリアル変換ボードの配線とテストを行いました。秋月製のFT2232Dモジュールは
信号レベルがTTLですが、H8のボードも、GPSユニットもRS232レベルなので、レベル変換用に
SipexのSP233ACPを付けました。そしてそして配線完了後、通信テストを行いました。
はじめはSP233ACPはインバータなので、反転したままではいけないと思い、74LS04で信号をもう一度
反転させて元に戻していましたが、テスト時にLS04は不要と分かり外しました。その後特に問題なく
使えるようになりました。
私のPCの場合、マザーボードに付いているCOM1の他にUSB-シリアル変換ケーブルを何箇所かの
USBコネクタにつないだり、Bluetoothの擬似シリアルポートを付けたりと、沢山シリアルポートが
あるので、FT2232Dモジュールは
COM9と10になりました。H8/3664のキットに付属のフラッシュROMライターは
COM4までしか使えないので、FT2232Dモジュールを経由せず、COM1から直に接続するための
コネクタも付けました。
磁気コンパスの取り付け
RDCM-802モジュールをW6から外してアース・ローバーにつけました。
2009.08.02
超音波距離センサの取付
前方の障害物検出用に超音波距離センサモジュールを付けました。モジュールはprallax製の
PING(レンジ3m)です。UNIで使っていたものを再利用しました。特性や調整方法に
馴染んでいるので、W6の秋月製モジュールを使おうかと思いましたが、電源と信号の電圧が違うので(9V~12V)マイコン周辺の
部品数削減を優先してPINGにしました。
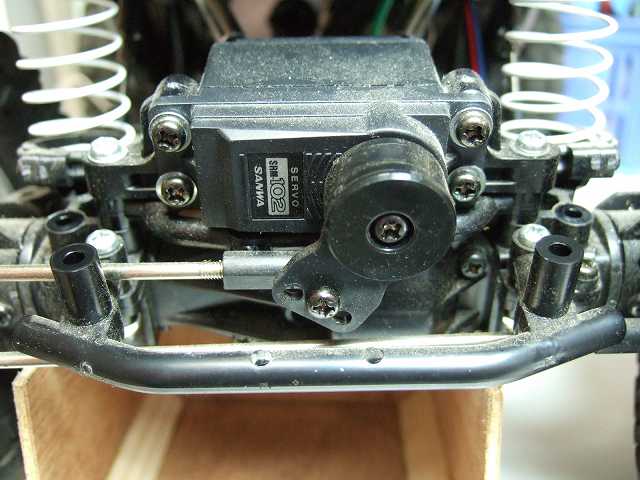
前から見る
今日のところは、プラ板で簡単に作ったステーに取り付けてあります。後日センサーヘッドを作る時に、
W6同様、カメラの間にレイアウトする予定です。
距離の測定はうまくいかないケースはいろいろありますが、障害物までの距離が測れたとして、
時速4kmでの移動時には、ラジコン状態と比べて倍以上の重量になったとしても、最高速度を1/3
に抑えるので、なんとか衝突する前に止まれるだろうと考えています。
マイコン用ソフト
センサ等の動作確認を終えたので、フラッシュメモリに書き込みました。ソフトの名前はw7aとしました。
作り方としては、いつものとおりにVisual C++2008でコーディングを行い、H8/3664キットに
付属の日立製Cコンパイラでコンパイルしました。
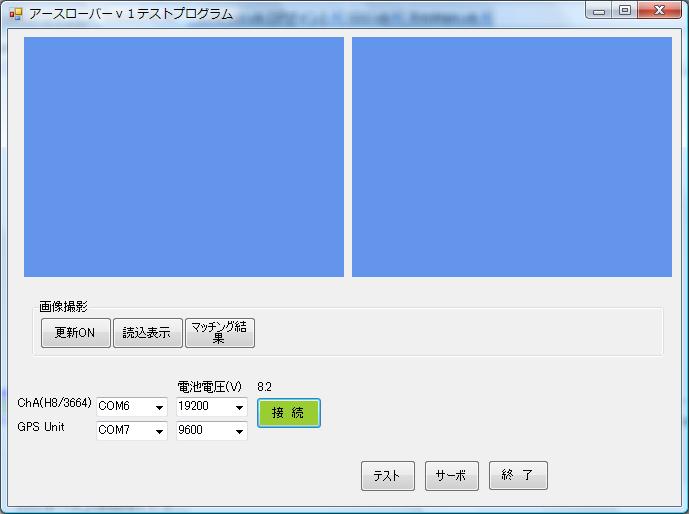
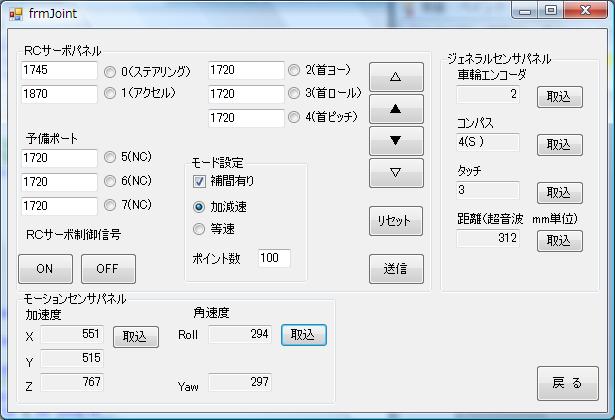
PC用ソフト
マイコン側の準備が出来たのでVisual Basic 2008で作り始めました。こちらのソフトの名前はw7bとしました。
まずはロボットの各機能を単独で動かす
機能を作りました。


画面イメージ
2009.08.11
操縦機能
5kg程度とはいえ、テスト中にちょこちょこかがんで持ち上げるのは疲れます。そこで、制御ソフトに
自信が持てるようになるまで、制御用のNetbookはロボットに載せずに有線でつないで、手に持って
テストを行うつもりなので、カーソルキーでロボットを操縦できる機能を付けました。
Netbookを搭載した後も操縦機能はあれば便利なので、Bluetooth
で無線接続した別のPCのキーボードから操縦できるようにしようと考えています。
走行テスト
一定の距離を指定のモーター出力で走る機能、超音波距離センサで障害物を検出したら停止する機能など、
走行に関する機能が出来たので、近所の公園で走らせてみました。以下は機能確認した項目です。
- 移動距離
50mと入力して走らせてみて、結果はハンディGPSの積算移動距離と比較しました。表示は49.3m
でした。ちなみに、GPSの画面に「精度3m」と出ていました。まあだいたいこんなもんだろうと思います。
- ステアリングと旋回半径の対応測定
5.5mのメジャーを置いて、RCサーボへのパルス長さを指定する数値と半径の対応を測定しました。
半径1~2m程度で無理なく旋回できました。
- 障害物検出時の自動停止機能
時速4~5km/h(速度はGPSで測りました)で2m前方に障害物を検出した時どの程度で止まれるか
試しました。停止後に再度距離を測ったところ1.3mだったので、70cm程度で止まったことになります。
今回ESCのブレーキ機能は使っていないので、現在の自重では十分な制動能力でした。重量が倍になっても
大丈夫そうな見通しがついたと思いました。
- 超音波センサの測定結果の正確さ
PINGのカタログ上の測定レンジは3mですが、実際に使ってみると表示が止まるのは3.5m程度
でした。音速の温度補正はしていませんが、花壇と縁石から3m程度の場所をメジャーで測ってロボットを
置き測定してみました。誤差は10cm程度だったので、問題無し・・・と思ったらテストの途中から157mmの
表示で固まってしまいました。
家に帰ってからGPS関係のプログラミングのため、エアコンの効いた27℃の部屋と、日陰だけれど35℃の
ベランダを往復しながら動かしていると、部屋では正しく測定できても、外に出すと157mmになることに
気がつきました。どうやらPINGは動作温度の上限が低いため夏場の屋外では使えないようだと思いました。
他の搭載機器は機器は35℃程度はOKなので残念ですが、別のユニットに変えようかと思いました。
- GPSとマイコンの干渉
マイコンのスイッチを入れると受信状態を示す棒が少し短くなりますが表示は「精度3m」まで行きました。
マイコンのスイッチを入れなければもっと精度が上がるのですが、W6の時の50mとか100mとかいう状態より
はずっといいので、当面はコレで良しとします。

公園にてテスト
2009.08.16
走行テスト
超音波距離センサの環境試験
基板の回路図
ロボットはまだまだ作りかけですが、いちおう動いたので現時点の回路図を貼っておきます。

マイコンのI/Oボード回路図
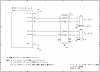
USBシリアル変換モジュールのI/Oボード回路図
2009.08.23
キャリブレーション
カーソルキーで操縦する機能に、ごくわずかにハンドルを切るモードをつけて直進の調整をし、ハンドルの
中立位置を調べました。ハンドルの中立位置が求まったので、中立位置から一定量PWMパルスの幅を変えた
ときの旋回直径を測定しました。
ナビゲーションプログラムの修正
@090822230114N3502394E13653865G003+00003E0000N0000U0004
処理開始
現在位置取得
@090822230207N3502386E13653860G003+00006E0000N0000U0002
目標地点の距離と方向を計算&終了条件判断
目標までの距離:29.2(m) 方向:57.99°
ループ初回例外処理(8m直進)開始
ループ初回例外処理(8m直進)終了
現在位置取得
@090822230235N3502381E13653859G004+00006E0000N0000U0003
目標地点の距離と方向を計算&終了条件判断
目標までの距離:44.3(m) 方向:65.22°
直前の移動距離と方向を計算
<実績>移動距離:15.8(m) 方向:-101.31°
移動計画 作成
旋回中(角度:167°)
旋回完了
直進中(距離:7.1m)
直進完了
現在位置取得
@090822230316N3502377E13653863G003+00007E0000N0000U0005
目標地点の距離と方向を計算&終了条件判断
目標までの距離:52.9(m) 方向:83.29°
直前の移動距離と方向を計算
<実績>移動距離:17.5(m) 方向:-45.00°
移動計画 作成
旋回中(角度:128°)
旋回完了
直進中(距離:7.8m)
直進完了
現在位置取得
@090822230339N3502378E13653869G003+00007E0000N0000U0010
ボディーの設計
現在の板一枚のデッキに変わって、Netbookを内蔵し、センサーヘッドを付けたボディー
の設計を始めました。

設計中のイメージ
2009.08.30
ナビゲーションプログラムの修正
先週にひきつづきプログラムの修正をした後、走行テストをしました。WGS84測地系の分単位の
部分の読み方についての勘違いや、経度1°辺りの距離が、緯度によって変わることを盛り込み忘れていた
点などを修正し、意図のとおり記録した座標に向かって走れるようになりました。
基礎的な部分が出来たので、つぎは複数のポイントを記録して辿る機能を作ろうと思います。あわせて
現在の「止まってGPS測定をして、走って」の間欠的な移動方式から一歩進めて、走りながら連続的に
GPS測定して目標座標を目指せるように変えようと思います。
ESC(電動アンプ)で感心したこと
ESCのFETと走行用モーターの過熱を心配しながら走行テストをしていましたが、現状のプログラムならば
FETのヒートシンクもモーターも手で触れる程度の温度で落ち着いていたので、大丈夫そうでした。
走行テストの途中で、一緒の電源からとっているRCサーボは動くのに、走行用モーターが動かない・・・という
状態になりました。過熱を避ける保護機能が働いたのかと思ったのですが、RCカーの暴走防止のためにある、
バッテリーの電圧が一定レベルを割ったら走行用モーターの通電をカットする機能が働いたものの様でした。
ここで初めてESC(サンワ BL-FORCE)のマニュアルをダウンロードして目をとおしたところ、この機種には
過電流、過熱、低電圧の保護機能が付いていることを知り、小学生の頃に使っていた電動アンプに比べると、
ずっと安心してロボットに使えるものだと感心しました。
どうやら、走行用に積んでいるNi-MHバッテリーからマイコンなど制御系統の電源をとっても平気そうな
感じがするので、ボディーが出来て、配線をやり直す時に試してみようと思いました。
2009.09.06
GPSデータ読取部の変更
ギア比変更
移動の最高速度を早歩き程度まで下げるため、モーター付きのピニオンギアを20Tから16T
に変更しました。

ピニオンギア
写真右側の小さいほうが16Tのギアです。
実は速度を下げる別の方法として、ラジコンショップに寄った時に衝動買いして置いてあった、
最高回転数が低い130Tのモーターも付けてみましたが、こちらは最高速度が2km/h
程度になってしまい低すぎでした。

モーター交換
上に写っているモーターを付けてみました。
マグネット追加
今まで約6kmほど走らせてみましたが、機構的に特に問題ないようなので、
旋回時の制御精度アップのため右後輪に1個付いていたホールセンサ用のマグネットを4個に
増やしました。半径1mで旋回させたとき、最大20度近く誤差がありましたが、5度程度まで
精度が上がりました。
GPSからの絶対座標を用いて移動の制御をするので、20度の誤差があってもそのうち目標地点の
近くまで辿りつけていましたが、制御精度が上がると、より早く辿り付けるようになります。

マグネット追加
ホイールの外周に90度間隔で付いている、赤くペイントしてある部品がマグネットです。
2009.09.13
走行テスト(複数地点の経由)
1つの標地点に向けて走るプログラムが動くようになったので、あらかじめ座標を記録しておいた
複数地点を経由できるように機能アップしてテストしました。
GPSの受信が良い状態でeTrexHの画面にはAccuracy 3mと出ます。画面を見ていると確かに止まっている
時も3m程度の範囲で測定結果が動いています。こういった測定結果なので5mピッチくらいで走りながら
測定した2点間より、ロボットが走っている方向を求める方式をとっていると、途中で目標から
大きくそれた方向に走り出すこともありましたが、最終的には目標から5mくらいの範囲には容易に
たどり着けました。
実は7月に
第3回GPSロボットカーコンテスト
の案内を頂いたので、11月までにGPSベースで走行する機能が出来上がったら参加する方向で、不景気で
いささか暇だということをいうことを考慮しても(笑)、急いで走行関係の製作を進めてきました。
こういうロボットを作るのは初めてなので、ハンディGPSだけでの誘導がどの程度の精度になるのか
感覚がありませんでしたが、ここ何回かのテストの結果、第2回コンテストのコースの様に目標地点の
間がどこでも走れるならば、今のアース・ローバー01でも、コース完走はOKで、ある程度の確率で
得点も入りそうだと分かりました。しかしながら、第3回コンテストのコースの様に幅数メートルの道を
8の字に走るのは、今のままでは不可能だと分かりました。
地図とランドマーク情報や、加速度とオドメトリからGPSの誤差を補正する機能、
障害物回避の機能など、諸々の機能を持たせようと思った場合、あと何回週末があるか数えて
「大会当日までには出来上がらないな~」と思いました。
というわけでコンテスト参加は怪しくなってきましたが、ロボットの機能・性能に目標があることは
良いことなので、当面は第3回GPSロボットカーコンテストのレギュレーションを目標に製作を続けようと
思いました。
電池の統合
2009.08.30に書いた様に、マイコン等の制御系等の電源を走行用のバッテリーから取るように
変更して走らせてみました。バッテリーの電圧が下がり、ESCが走行用モーターの電流をOFFにする
機能が働く辺りまでマイコンにリセットがかかることもなく動作しました。電池の電圧が下がった時に
安全に止まる事も確認できたのでこのままいくことにしました。
サーボセーバー撤去
走行経路のグラフィック
いつもの公園の歩道を手動操縦で周回した結果をGoogleEarthに表示してみました。
テストした場所でのGoogleEarthの正確さは分かりませんが、写真と軌跡は数メートル
程度のずれがありました。

経路表示
2009.09.20
ボディーの製作
基本的なテストをひととおり終えて、全体的なシステムとしての成立に問題ないと思える
ところまで来たので、今後数年間遊ぶのに扱いやすいよう、ボディーの製作を始めました。
今日は基板類を入れる部分をプラ板で作りました。

サイドボックス
GPS入力に対するフィルタ
誘導を安定させるため、GPSから来る座標値が例えばロボットが進めない方向にシフトした時とか、
最高速度を超えてシフトした時の入力をキャンセルするようなフィルタを入れる方向で検討中です。
ネットで調べてみると、GPSのフィルタといえばカルマンフィルタの様です。資料が沢山あったので
読んでみました。(そういえば、海上の一点に留まる機能がある船でも使っていました。)
・・・式の読み方をすっかり忘れてしまったというか、勉強したかどうかの記憶も
定かではない状態なので、コンセプト的にこういう感じのものを入れようと思いました。
2009.09.27
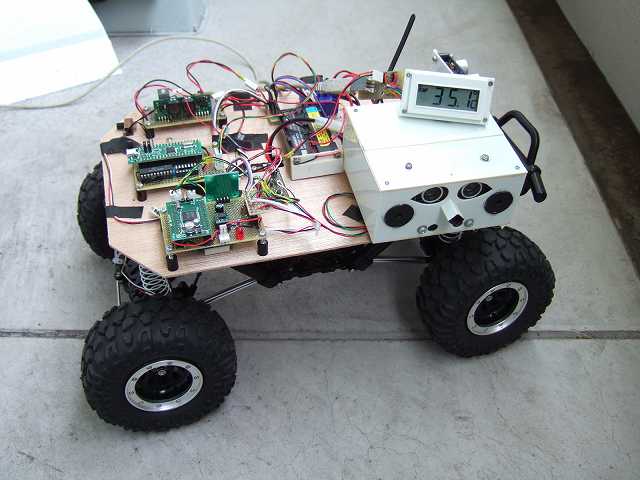
ボディーの製作
サイドボックスを左右そろえ、ボディーの下半分を作った後に塗装しました。
動かしているときに目立つように黄色に塗装することとしました。


ボディー
ニューラルネットワークチップ
ロボソート
さんから「製品のデモンストレータロボットを作るのに相談できる人を探してるんですけど・・・」
といったメールを頂いたので、ちょうどどういう手法を採用して画像認識しようか検討中だったこともあり、
シルバーウィークを利用して見せてもらいに行ってきました。
RobotWatchの
こちら
で記事になっています。学生の頃、同じ研究室でPC9801を使いシミュレーションしていた
ニューラルネットワークの印象しかなかったのですが、それに比べると学習も認識も非常に・・・
というか比較にならないくらい早く、ボードもコンパクトで「コレは使える」と感じたので、
「アースローバーに是非搭載したいです」ということで割引販売してもらってきました。

認識ボード - RT-01-003-1
アースローバーに搭載予定のWebカメラの画像を、搭載PCのOpenCVで処理した後、
このチップ「CogniMem」に学習/認識させようという構想で、チップのみのボードを購入しました。
ぼちぼちドキュメント類に目を通したり、インターフェイスの設計をしたりを進め、GPS関係の
後、12月から作業を始めようと思います。
画像に限らず、ビット列にモデル化できて、パターンがあるものならば何でも学習・認識の
対象になるので、別のものにも使ってみたいと思っています。
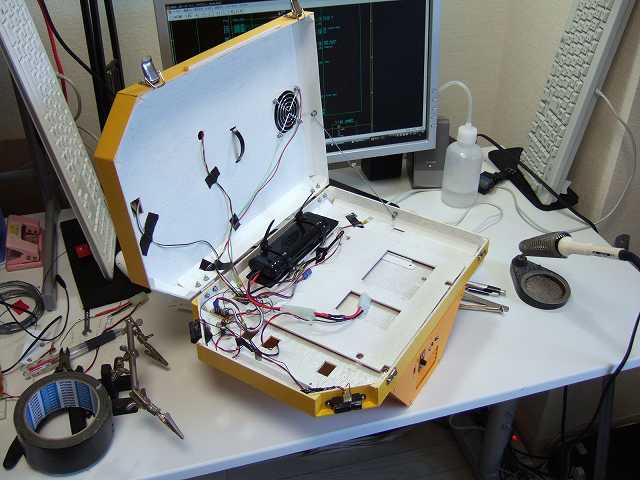
2009.10.04
ボディーの製作
ボディーの上半分を作り、塗装の後、ヒンジや固定金具、そして冷却用のファンなどを取り付けました。上下の
合わせ目が少しずれてしまったので「もう少し丁寧に作ればよかったかな~」と後から思いましたが機能的に
問題ないのでそのまま使うことにしました。


ボディー
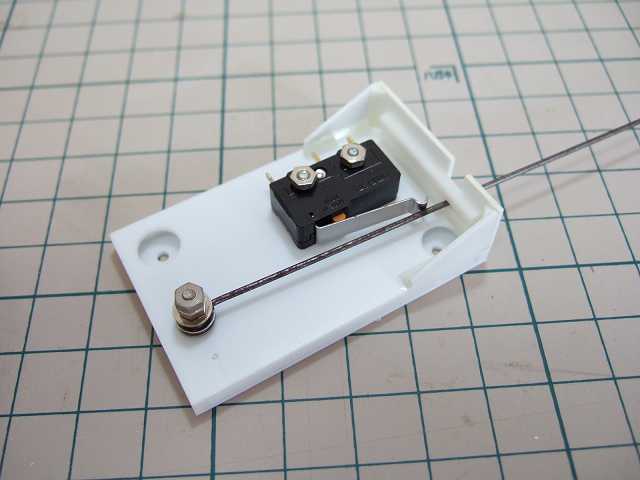
タッチセンサユニットの製作と取り付け
オムロンのマイクロスイッチをブラ板で作ったベースに取り付け、ピアノ線で作ったアームを
取り付けました。


ボディー
2009.10.11
センサ取り付けと配線
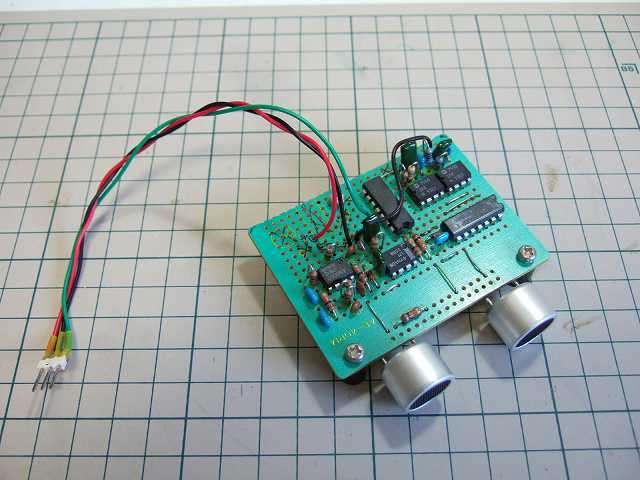
超音波距離センサのインターフェイス回路追加と調整
超音波距離センサの機種変更(PING→秋月キット)のため、マイコンのI/Oボードに
12V電源を作るDC-DCコンバータと、12V→5Vの信号レベル変換回路を
加えました。
キットは1秒間に約15回測定する様に組んであったので、RCサーボの信号を作る合間に
測定結果を拾いやすいように、約40回測定する様に、測定周波数を決める抵抗を交換しました。

超音波距離センサキット
キットは距離表示用の7セグLEDとそれに関連する回路を省いて組立ててあります
2009.10.18
センサーヘッドの製作
プラ板でセンサーヘッドを作りました。この中に超音波距離センサ、Webカメラ等が入ります。
ロボットの周囲をマッピングする時に、ヘッドの向きが正確であることは重要なので、首のRC
サーボは手持ちの中で一番いいサンワのERG-WRXを使いました。センサのレイアウトはW6と
同じにしました。

センサーヘッド
超音波距離センサの取り付けが完了しました。カメラはまだです。
首は3軸にしようかな~と思っていたのですが、視野の広いカメラを積むし、W6の様に
手元を見る必要もないので、しばらく1軸でいくことにしました。
ソフトの機能追加
PC用とマイコン用ソフトのそれぞれに、新たに搭載したセンサのインターフェイス用サブルーチンを
追加しました。どのセンサもW6で使っていたものばかりなので、実際の作業としては、W6のソフト
から関連する部分をコピーしました。ちなみに通信フォーマットも、同じ機能は同じフォーマットに
しています。
2009.10.25
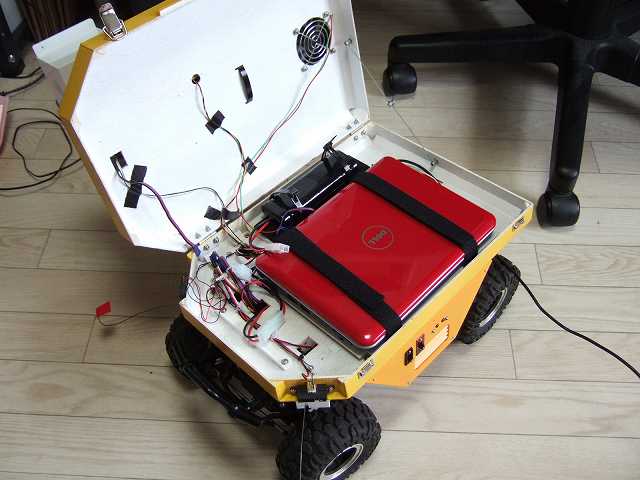
配線の整理とPCの搭載
サスペンションのスプリング変更
2009.10.31
走行テスト
超音波距離センサと赤外線距離センサの測定距離が一定以下になった時と、タッチセンサに
反応があったときに止まる機能を付けたので正しく動作するか確認しました。
PCをロボットに内蔵してしまうと、走行開始の操作に画面を使うことが
出来ないので、あらかじめ画面の操作で待機状態にしてから蓋を閉め、タッチセンサを
触ることによって走行開始できる機能をつけました。動かしてみた感じ、どうもロボットの
状態が分かりにくいので、操作パネルや簡単な画面、もしくは音声出力でも付けようかと
思いました。
PCを載せて走らせてみました。ゆっくり走るし、サスペンションも柔らかいので、衝突
でもしない限りは今のPCの固定方法で良さそうでした。
2009.11.08
GPS用フィルタの検討
-
以前の走行テストの時に記録した、公園を一周するパスを入力データとして、ロボットの移動能力
を超えている部分について、移動能力から予測される範囲の位置に補正するフィルタの検討をしました。
いまひとつうまくいっていませんが、とりあえず速度を測る機能が必要だなと思いました。
プログラムへの機能追加
- .Net FrameworkのStopwatchクラスを利用して、車輪のエンコーダのカウント値が変わる時間を計り、速度を
求める機能を追加しました。この方法ではラフにしか測れませんが、とりあえず良しとしました。
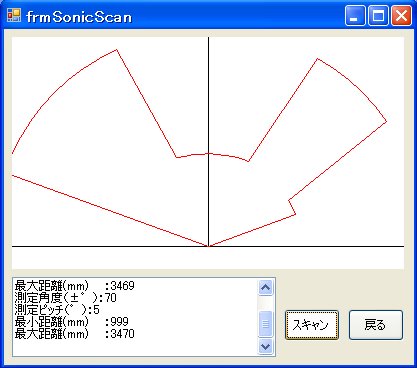
- Pen4号のコードを流用して、超音波距離センサの測定結果でレーダーチャートを描く機能を加えました。
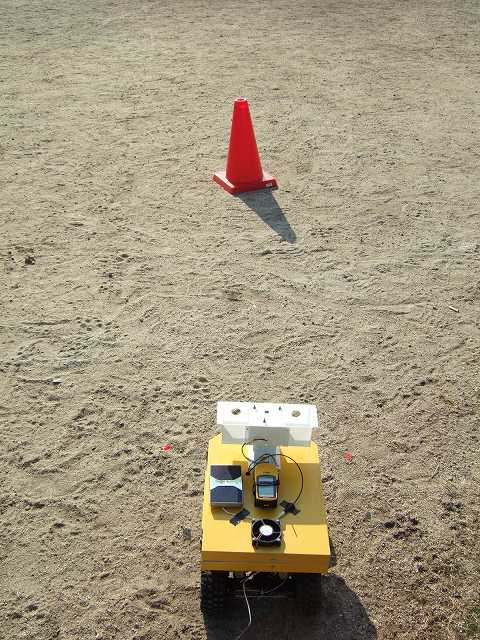
「第3回GPSロボットカーコンテスト」にエントリーしたので、コンテストでコースに置かれるコーンと同じような
コーンをホームセンターで買ってきて、レーダーチャートに写るか試してみました。結果はOKでした。
コンテストを想定し、2つのコーンの間を往復するように、コーンの座標を登録して走らせて見たところ、高確率でコーンに衝突しました。
やはりコーンへの接近と回避の機能が必要だと思いました。


レーダーチャート
- 音声ガイドとして、Windows Vista標準音声合成エンジンのMicrosoft Annaに読ませたテキストを
WAVファイルに落とし、待機状態に入った時などにwavePlayerクラスを利用して再生するようにしました。
できれば日本語が良かったのですが、日本語の音声合成エンジンはOSに付いていないので英語でよしとしました。
そして、PCのスピーカはボディーの中からでは聞こえにくいので、ボディーの上にアクティブスピーカーを載せました。
- サーミスタ(ボディーの中に付けている)のA/D変換値を、補間テーブルを使って温度に変換する機能を
加えました。コードはW6から流用しました。
ステアリング用RCサーボの中立位置
SRM-102は気温の影響で中立位置が分かるほど変わるようです。走行試験のたびに調整するのが
面倒なので、こちらもデジタルサーボに交換して様子を見てみようと思いました。
候補はERG-WRXかKRS2346ICSで考えています。
2009.11.15
ステアリング用RCサーボの交換
KONDOのKRS2346ICSに交換しました。しばらく走らせながら様子を見ようと思います。
出力軸がベアリング支持のしっかりしたRCサーボなので、フロント周りのガタが減っていい感じです。
障害物回避機能
超音波距離センサを使った回避機能を作って試してみました。進行方向に障害物の反応が出たら、首を動かして
レーダーチャートを生成し、空いている方向に避けるアルゴリズムです。しかし、風があると(今日は風速6m前後?)
正しい距離を測れない様で、何もないところで度々回避動作に入ってしまいダメでした。仕方がないのでタッチセンサ
に反応があってから(要はぶつかってから)バックして方向を変える回避動作も作りました。こちらは機能しました。
W6と違ってアースローバーは、ロボットの大きさと比べて十分広いところを走らせるので、バックはしないつもり
でした。そのため後ろ向きのセンサを付けていません。積極的にバックを使う様ならば、後ろ向きのセンサも増やす必要
があるなと思いました。
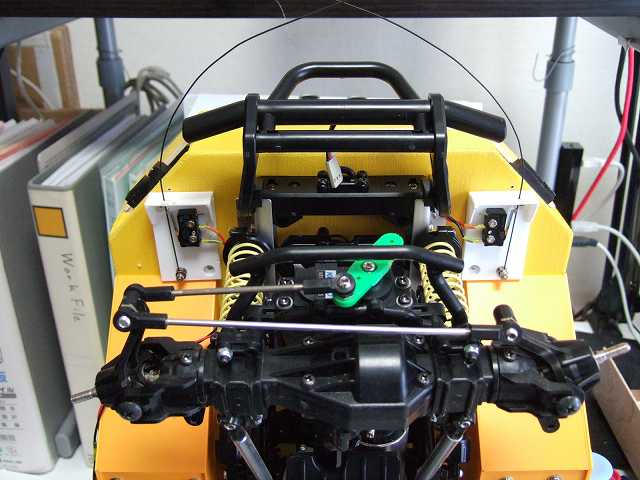
触覚のレイアウト変更
正面の障害物は超音波距離センサで見つけるつもりで、触覚を左右に張り出すレイアウトとしていました。
しかし超音波距離センサをあてにできない日も多そうなので、触覚を交差させるレイアウトに変更しました。
これで正面の障害物にも反応するようになりました。


触覚のレイアウト
2009.11.22
走行テスト
先週は障害物を回避した後、元の目標に向かう部分の計算が間違えていたので修正しました。2009.09.13の所で
測定した、公園の歩道の一部区間を辿れるか試してみました。1回しか試していませんが、50m程度の直線に
近い区間を、植え込み
に突っ込んだりせずに走ることがでしました。ちなみに09.13の走行テストでは5mほど走ったところで植え込みに
突っ込み、障害物回避/復帰機能もなかったのでそこまででした。多少進歩したなと思いました。
1km/h程度で360度旋回しながら0.2秒おきに測定し、赤外線距離センサ(PSD)について直射日光の影響を見てみました。
センサの光軸からずれていれば、センサ本体が日向に出ている状態でも大丈夫では?と期待していたのですが目測で
40度くらいの範囲に入ってくると物があるかのように反応が出てきました。今のマウント方法で、晴れの日は
障害物回避のトリガとしてはあてにできないことがわかりました。センサに直接日光が当たっていなければ、測定対象
に日光が当たっていても、表面の状態によっては正しく測定できるようなので、マウント方法を工夫して使い続ける
方向としました。

PSDの屋外テスト
輸送の準備
2009.11.30
GPSロボットカーコンテスト参加
11/29に東京海洋大学のテニスコートで行われた
第3回GPSロボットカーコンテスト
に参加してきました。ルールに「主催者発表のWayPointデータを必ず使い、自分のロボットで計測するのは
禁止」と明示していなかったので「主催者発表のWayPointデータ使用は任意」と解釈し、自分で測定する
つもりでソフトを作っていましたが、1週間前の問い合わせで「主催者発表のWayPointデータを必ず使う」
事が分かり、急いでWGS84フォーマットのWayPointデータを読ませて、出走直前に既知座標でGPSの
測定誤差を測定して走り出す機能を加えました。シンポジウムの趣旨からいって、なんとなく予想できていたことなので、
もっと早く問い合わせをしておけばよかったかなと思いました。
最後に加えた機能は、ロボットを実家に発送した後で作ったものだったので、うまく働くか心配でしたが、
設計どおりに機能して良かったです。
持ち時間の間に2回走らせ、2回とも積んでいるGPSの精度と、制御ソフトの機能から予測される程度の正確さで
WayPointを巡り、完走しました。競技結果はエントリー8台、当日参加6台の中で2位でした。

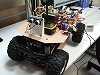
走行の様子


GPSの受信状態
周囲に高層ビルがあるせいか、意外と補足できる衛星の数が少ないと思いました。

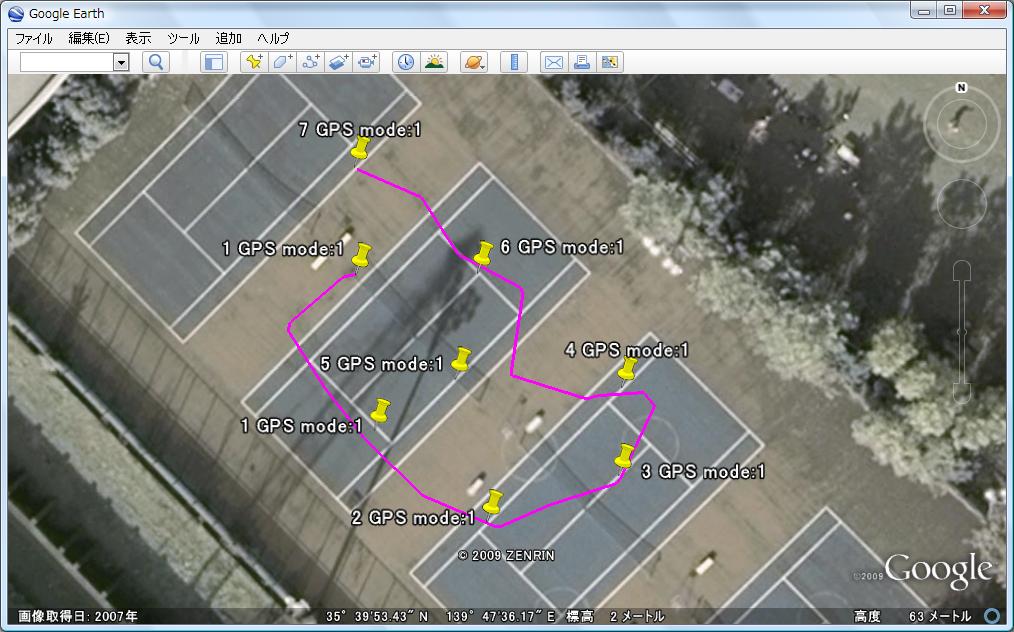
走行ログ
WayPoint(画鋲マーク)と走行ログをGoogleEarthにプロットしてみました。
1回目の走行の記録です。「4GPS mode1」のポイントで2回コーンにぶつかり回避動作を行ったせいか、
次のポイントにうまく近づけませんでした。
このテニスコート周辺については主催者提供のデファレンシャルGPS
による座標データとGoogleEarthのイメージが、テニスコートの白線の幅程度に合致していました。
既知座標による補正機能もうまく働き、思ったよりも正確に走りました。
総括ですが、一人で進めていたら、これほど短期間に、GPSによるナビゲーションの精度にこだわって製作することも
なかったと思うので、自分以外の視点が性能アップに役立って良かったと思いました。また、たの参加者の方々と
情報交換もできて有意義でした。参加者および、主催者の方々、みなさんお疲れ様でした。
2009.12.06
I2Cの練習
2009/09/27に話題にしたニューラルネットワークチップ(CogniMem)を使う準備を始めました。CogniMemはI2Cでインターフェイス
するのですが、いままでI2Cを使った経験がないので、手元にある部品のなかで、比較的情報が多いAKI H8/3694と
リアルタイムクロックモジュールRTC-8564NBの組み合わせで練習してみることにしました。
学習/認識させるにあたり、チップとやり取りしなければならない情報量は少ないので、PCからはH8/3694を経由しUSB <->RS232<->I2C
という経路でアクセスすることにしました。H8/3694のボードを使うにあたって、H8/3664のキットについてきた開発ソフトをそのまま使えるように
クロックを20MHzから16MHzに変更しました。CコンパイラのヘッダファイルはH8/3664と一部異なるので、HEW4のH8/3694用
の物に若干手を入れて流用しました。
ほんとうならばHEW4を使いたいところですが、Vistaで動かないので、これまでどおりH8/3664のキットについてきた古い
Dos窓で使う日立の評価版Cコンパイラを使いました。

CogniMem I/Oボード
基板は、アースローバーのサイドボックスの空きスペースに収まるようなサイズに作りました。
立っているのがCogniMemのRT-01-003-1(CM-PM1K)ボードです。
試しに作ってみたソフトからRTC-8564NBにアクセスできているみたいな感じなので、これをベースにCogniMemの説明書を
よく読みながらソフト制作にかかろうと思います。
2009.12.13
I2Cバスのテスト
マニュアルを大体読んだので、自作基板の配線を確認し、RTC-8564NBとCM-PM1Kの両方がI2Cバス上にあるとき
先週作ったソフトでRTC-8564NBに正常にアクセスできるか試してみました。
すると、動きませんでした。簡単にチェックしてみたところCM-PM1K用の3.3V電源ラインの電圧が出ていません
でした。そして、3端子レギュレータが過熱していました。「ショートだー」ということであわてて電源OFF
にして、もう一度念入りに見直しました。
結果は手元にあるCM-PM1Kと、自作基板設計時に見た
この資料
は、J4コネクタの電源ピンの配置が、VccとGNDで逆でしたorz
チップが壊れてしまった可能性は低くないですが、とりあえず続けようと思います。
つづく
戻る