
台車とアームをW6v3から流用し(センサーヘッドはアースローバーから流用)、全体レイアウトも似ているので、名前はW6v4としました。 ボディーの設計にあたっては、屋内重視のW6v3と比べ小回りが利くことよりも、走行スピードを高くし、 カメラも遠くまで見える様に解像度が高く、直射日光下でも使える様、撮影可能な明るさのダイナミックレンジの大きいものにしました。 このロボットでやりたいこと/出来ることはアース・ローバー01とだいたい同じものを考えています。
 |
 |
 |
 |
|
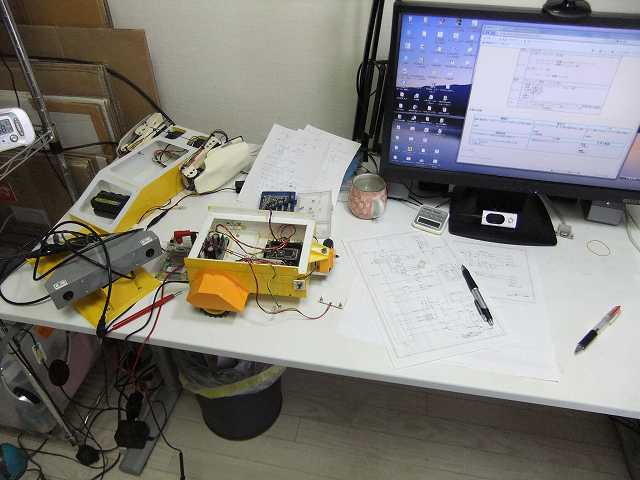
システム全体 本体とノートPCで構成されます。 |
作業中のスナップ |
腕サーボの配置 腕はW6v3からの流用です。 |
移動用モーター 田宮の6速ギアボックスに フォトインタラプタを付けています。 タイヤを屋外用に交換しました。 |
 |
 |
 |
 |
|
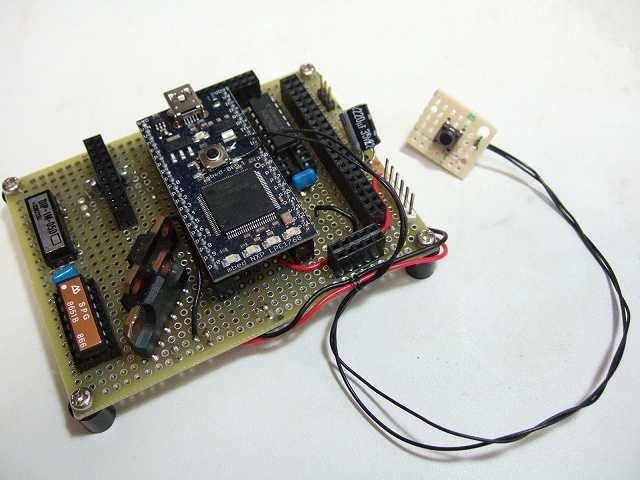
マイコンボード LPC1768とHブリッジドライバ などが載っています。 |
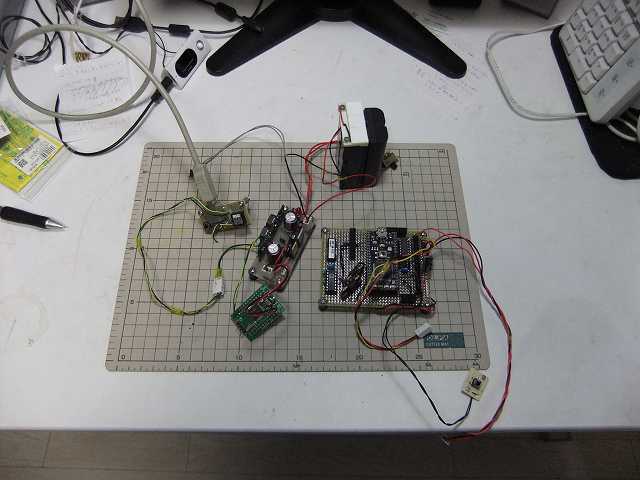
制御用基板類 システムブロック図で言うCPU1 CPU2、電源ユニット 電池が写っています。 |
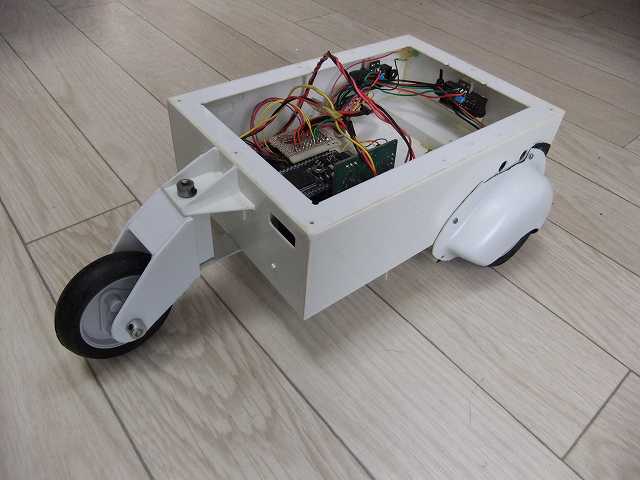
フレーム(製作中/塗装前) いつものプラ板製です。 |
尾輪 屋外走行用に、W6v3までの キャスターからサイズアップしました。 |
|
走行の様子 だいたい2km/h位の速度で走ります。 |
腕の動作 可動範囲はこんな感じです。 |
|
ステレオマッチング 2台のカメラの映像の視差から写っているものまでの距離を測定しています。 画像の中を動く水色の四角が比較中の場所で、白いエリアの赤い印が測定できた 場所を示します。 |
ステレオマッチング結果の3D表示 左のムービーのように測定した結果を3次元的に見てみるため 測定結果からSTL形式ファイルを作り、CADで表示してみました。 |
|
|
|
|
オプティカルフロー OpenCVの機能を試してみました。 |
|
| 全高 | 236mm |
| 全長 | 360mm |
| 全幅 | 310mm |
| 重量 | 約2020g |
| モーター |
RC用サーボモーター 計9個
(メーカー:サンワ 機種:SX-101Z・・・腕)
走行用モーター 2個 |
| 電源 |
リチウムイオン電池 (7.2V 19.4Wh) |
| センサー |
|
| CPU |
Windows PC(ナビゲーション、画像処理・認識用) mbed LPC1768(走行制御/ロボット-PC間インターフェイス用) AKI-H8/3664F(RCサーボ制御用) |

|
画像の処理が重いので、全体の制御はPCで行います。モーターの制御やセンサーとのインターフェイス はロボット搭載のマイコンで行います。ロボットを動かすときは制御用のPCとロボットの間を数メートル 程度のUSBケーブルで接続します。 (ケーブルの長さの範囲を超えて移動するときは、PCを手にもって後をついてゆきます。) |