幵椉宆儘儃僢僩(倂俇)偺惢嶌擔帍丂偦偺係
惢嶌偺嬫愗傝偛偲偵丄屆偄暔偐傜怴偟偄暔偺弴偵彂偄偰偁傝傑偡丅
2005.04.04
摲懱俼俠僒乕儃梡曗娫幃偺弨旛
庱偲崢偺俼俠僒乕儃偺娭愡妏搙偑丄擖椡抣偵懳偟偰傛傝惓妋偵捛廬偡傞傛偆偵丄擖椡抣
乮妏搙乯偐傜俼俠僒乕儃傊偺弌椡抣乮俹倂俵僷儖僗偺暆乯偵曄姺偡傞曗娫幃偺弨旛偲偟偰丄
弌椡抣偲俼俠僒乕儃偺幚嵺偺妏搙偲偺懳墳傪應掕偟傑偟偨丅崱夞偼丄弨旛偑
柺搢側偺偱應掕偵偼儗乕僓乕偼巊傢偢丄偄偮傕偺捈宎侾俉們倣傎偳偺暘搙婍偱寁傝傑偟偨丅
埲壓偼偦偺寢壥偱偡丅廲幉偑俼俠僒乕儃傊偺弌椡抣丄墶偑妏搙偱偡丅
儔僕僐儞偱晛捠偵巊偆亇係俆搙掱搙偺斖埻偱捈慄惈偑椙偔丄壜摦斖埻尷奅偺曈傝偱偼
椙偔側偄偲偄偆孹岦偑尒偊傑偡丅俀俴侾仌俀俴俀偱偼亇係俆搙掱搙偺斖埻偟偐巊傢側偄
偺偱丄侾杮偺慄偱寁嶼偟偰偄傑偟偨偑丄倂俇偼壜摦斖埻傪峀偔巊偆偺偱丄捈慄傪暘妱偡傞偐丄
俆師掱搙偺懡崁幃偱嬤帡偡傞昁梫偑偁傞偲僴僢僉儕偟傑偟偨丅
崱夞偺寢壥傪倂俇倴俁偺僾儘僌儔儉偵斀塮偟偨偲偙傠丄帺婡埵抲偺應掕寢壥偺岆嵎偑
悢僙儞僠偺儗儀儖傑偱彫偝偔側傝傑偟偨丅
崢儓乕幉偺俼俠僒乕儃丗僒儞儚丂俤俼俧亅倂俼
庱儓乕幉偺俼俠僒乕儃丗僒儞儚丂俤俼俧亅倁俼
庱僺僢僠幉偺俼俠僒乕儃丗僒儞儚丂俤俼俧亅倁俼
僗億儞僕僉儏乕僽傪抧恾偵彂偄偨寢壥
寢嬊丄暋悢偺捈慄偱曗娫偡傞曽朄傪嵦梡偟偰傗偭偰傒偨偲偙傠丄偩偄偨偄僉儏乕僽侾屄偐傜
俀屄暘掱搙偺
嫍棧偺岆嵎乮岆嵎偺戝偒偝偼彅忦審偱曄傢傝傑偡丅乯偵側偭偨偺偱丄摉柺偼僐儗偱傛偟偲偡傞偙偲偵
偟傑偟偨丅
崱屻偼丄暻偵嬤偄摍愙嬤曽岦偵惂栺偑偁傞応崌偺堏摦宱楬偺帺摦寛掕傗丄戲嶳偁傞応崌偵
偳傟偐傜庢傞偐偺桪愭弴埵偺昡壙曽朄偦偟偰丄僨乕僞儀乕僗偵婰榐偟偨傕偺傪儘儃僢僩偑
摦偐偟偨応崌傗丄搑拞偱棊偲偟偰尒幐偭偨応崌側偳懳徾偺忬懺偑曄傢偭偨偲偒偺僨乕僞
儀乕僗偺峏怴曽朄側偳丄僥乕儅傪曄偊傛偆偲巚偄傑偡丅偦偙偱丄彮偟堘偆傕偺傪嶌傝側偑傜帪娫傪
偍偄偰峫偊傞偙偲偵偟傑偟偨丅
2005.06.26
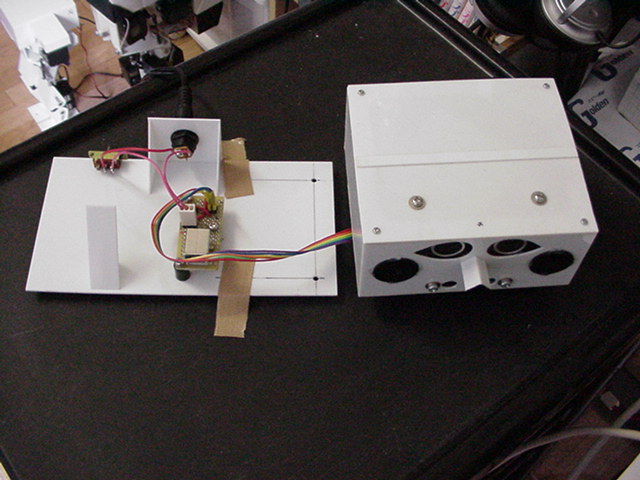
乽摢晹儐僯僢僩乿偩偗偱偺楢懕塣揮
僗僀僢僠儞僌俙俠傾僟僾僞乕偱俆倁偺揹尮傪嫙媼偟丄摢晹儐僯僢僩偩偗偱摦偔傛偆偵
僐僱僋僞傪偮偗傑偟偨丅偦偟偰偙偺幨恀偺宍偱丄侾侽暘偍偒偵夋憸丄婥壏丄柧傞偝偺
僨乕僞傪婰榐偡傞僾儘僌儔儉傪彂偄偰丄悢擔娫楢懕偱摦偐偟偰梀傫偱傒傑偟偨丅

|
摢晹儐僯僢僩
摢晹儐僯僢僩偩偗偱摦偐偣傞傛偆偵偟傑偟偨丅偙偆偡傞偲丄帺摦娤應僗僥乕僔儑儞偲偄偆偐丄
掕揰僇儊儔偺條側巊偄曽偑弌棃傑偡丅
|
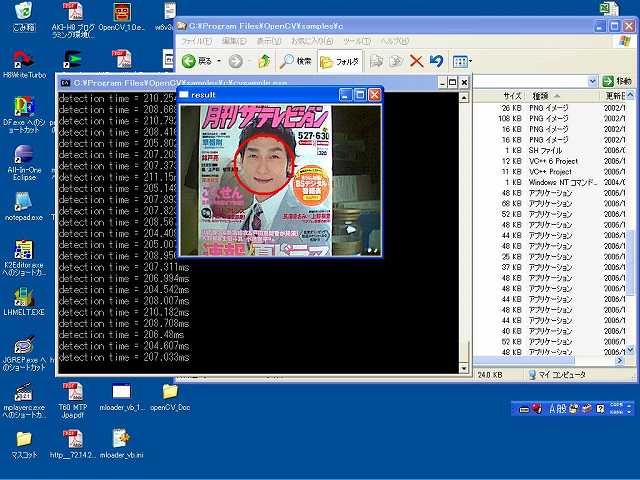
應掕寢壥偺椺
應掕偵巊偭偨僾儘僌儔儉偺榖
偼偠傔偼丄夋憸張棟傪偟側偑傜倂俇傪摦偐偡帪偺丄俹俠偺僾儘僌儔儉偵丄俹俠偺帪寁傪
億乕儕儞僌偟側偑傜丄堦掕帪娫偑宱夁偡傞偛偲偵應掕偡傞僾儘僌儔儉傪帋偟偰傒傑偟偨丅
倂倝値俋俉俽俤偺俹俠偱丄儚乕僾儘傗僗僾儗僢僪僔乕僩傗僐儞僷僀儔偺僾儘僌儔儉傪摦偐偟側偑傜
丄偙偺應掕僾儘僌儔儉傕摦偐偟偰傒偨偲偙傠丄儚乕僾儘摍偺儗僗億儞僗偼僗僩儗僗傪姶偠傞
掱棊偪傞偼丄惂屼僾儘僌儔儉偺傎偆偼丄俷俙梡僾儘僌儔儉傪戲嶳摦偐偟偨僞僀儈儞僌偱
捠怣偑僨僢僪儘僢僋忬懺偵側傞傢偱丄僀儅僀僠偱偟偨丅
偦傫側傢偗偱丄夋憸偼巭傔偰丄壏搙偲柧傞偝偩偗丄儅僀僐儞儃乕僪偺儊儌儕乕偵婰榐偟丄
帪乆俹俠偵僨乕僞傪僟僂儞儘乕僪偡傞曽幃偵曄偊傑偟偨丅僐儗偼椙偄姶偠偱偟偨丅
俹俠偲偺捠怣働乕僽儖傪奜偟偰摦偐偟偰偄傞偲丄摦偄偰偄傞偐偳偆偐偺儌僯僞乕偵
巊偊傞僴乕僪偑埑揹僽僓乕偟偐側偄偺偱丄應掕偡傞偲偒偵乽僺僢乿偲柭傜偡傛偆偵
偟傑偟偨丅栭怮偰偄傞帪偵摦偐偡偙偲傪峫偊傞偲丄偆傞偝偄偺偱丄儌僯僞乕梡偵
俴俤俢偑晅偗偨偔側傝傑偟偨丅
2006.09.10
埑揹僽僓乕偱倂俙倁僼傽僀儖嵞惗
俼俷俛俷亅俷俶俤偱丄壒惡嵞惗婡擻偮偒偺儘儃僢僩傪尒偰妝偟偘偩偭偨偺偑報徾偵巆傝丄
偦偺偆偪帺暘偱傕傗偭偰傒傛偆偲巚偭偰偄傑偟偨丅偦偺愄丄僷僜僐儞偺嶨帍偱俉俉侽侾偐俋俉侽侾
偁偨傝偺埑揹僽僓乕偱壒惡傪嵞惗偡傞婰帠偑婰壇偵偁偭偨偺偱丄倂俇偺埑揹僽僓乕偐傜倂俙倁
僼傽僀儖傪嵞惗偟偰傒傑偟偨丅
僒僂儞僪儗僐乕僟乕偱丄嶨帍偺晅榐偺俠俢偵擖偭偰偄偨乽Windows傪婲摦偟傑偡乿偲偄偆惡傪
俹俠俵丂侾俇倠俫倸丂俉倐倝倲偵曄姺偟偰嵞惗偟偰傒傑偟偨丅尵偭偰偄傞偙偲偼廫暘暦偒庢傟傑偟偨偑
壒偑彫偝偐偭偨偱偡丅揹幵偺拞偱傕暦偙偊傞偔傜偄偵僙僢僩偟偨僿僢僪儂儞僗僥儗僆偺僀儎儂儞傪
帹偐傜彮偟棧偟偰暦偄偰偄傞傛偆側姶偠偱偟偨丅偲傝偁偊偢偼傾儞僾偲僗僺乕僇乕
偑昁梫偐丒丒丒偲巚偄傑偟偨丅傑偨丄偙偺僨乕僞偼傾僯儊偺惡桪偝傫偺傕偺偱偟偨偑丄
側傫偩偐丄惡偺摿挜偑暘偐傜側偔側偭偰偟傑偭偨條偵傕姶偠傑偟偨丅
偪側傒偵僾儘僌儔儉偼偡偛偔娙扨偱丄ITU傪係暘廃偺僼儕乕儔儞僯儞僌僇僂儞僞儌乕僪偵偟偰丄WAV
僼傽僀儖偺僶僀僫儕僨乕僞偺悢帤傪埑揹僽僓乕偺ON帪娫偵僙僢僩偡傞偩偗偱偡丅
僒儞僾儖
for(ii = 0; ii < wav_data_num; ii++)
{
ITU2.TCNT = 0;
P4DR.BIT.B7 = 1;
while(ITU2.TCNT < wav_data[ii]);
P4DR.BIT.B7 = 0;
while(ITU2.TCNT < 390);
}
僾儘僌儔儉偺嶌惉偵摉偨偭偰偼壓婰偺俫俹傪嶲峫偵偝偣偰偄偨偩偒傑偟偨丅
嬤摗惓朏 偝傫偺乽WAV 僼傽僀儖僼僅乕儅僢僩乿偺儁乕僕
http://www.kk.iij4u.or.jp/~kondo/wave/
偄偟偐傢偒傚乕偡偗偝傫偺丂僱僈僥傿僽儘儃僢僩乽傗傔偰傛孨乿偺儁乕僕
http://www.asahi-net.or.jp/~qx5k-iskw/lego/yamete.html
2006.09.17
埑揹僽僓乕偱倂俙倁僼傽僀儖嵞惗乮俀乯
2006.09.24
埑揹僽僓乕偱倂俙倁僼傽僀儖嵞惗乮俁乯
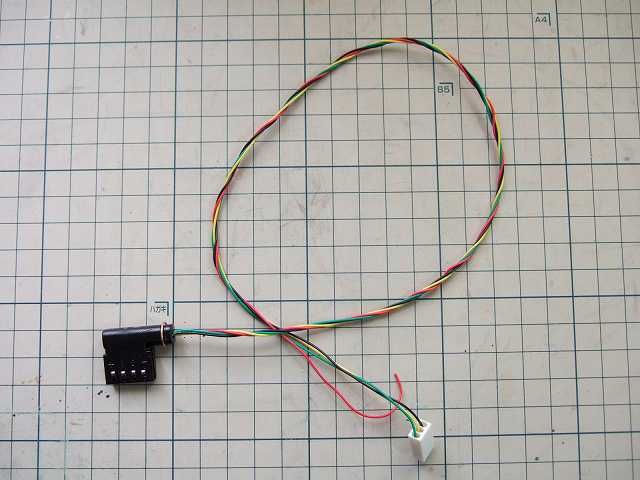
愭廡攦偭偨傾儞僾偺僉僢僩偲僗僺乕僇乕傪搵嵹偟傑偟偨丅崱巊偭偰偄傞僲乕僩俹俠傛傝傕
傓偟傠椙偄偔傜偄偺姶偠偵側傝傑偟偨丅偙傫側偲偙傠偱椙偟偲偟傑偡丅

|
傾儞僾僉僢僩偲僗僺乕僇乕
乮桳乯僄僗働僀揹巕惢偺傾儞僾俁俉俇偲偄偆僉僢僩偲搶嫗僐乕儞惢偺俽係侽俠侾侾俲亅侾偲偄偆
俉兌乛侽丏俀倂偺僗僺乕僇乕傪巊偄傑偟偨丅
|

|
搵嵹忬懺
傕偲傕偲埑揹僽僓乕偑晅偄偰偄偨応強乮摢晹儐僯僢僩懁柺乯偵晅偗傑偟偨丅
|
2006.10.01
倁俠僾儘僌儔儉偺惍棟
帇妎娭學偺僾儘僌儔儈儞僌傪嵞奐偡傞偨傔倁俠偱彂偄偰偁傞晹暘傪惍棟偟傑偟偨丅
堷偭墇偟偨偣偄偱埲慜嶌偭偨晹壆傪儌僨儖壔偟偨抧恾僨乕僞儀乕僗傗丄寀岝摂偺擣幆僾儘僌儔儉
偼巊偊側偔側偭偰偟傑偭偨偺偱丄偙傟傜傪奜偟偰倁俠俀侽侽俆偱怴偨偵僾儘僕僃僋僩傪掕媊偟傑偟偨丅
僗僥儗僆價僕儑儞偺僾儘僌儔儉偐傜嵞奐偟傛偆偲巚偭偰偄傑偡丅
2008.01.27
儊僀儞俠俹倀偺儌僯僞僾儘僌儔儉曄峏
俹倕値係崋偑偄傠偄傠側柺偱堦嬫愗傝偟偨偺偱偙偪傜偺惢嶌偵栠偭偰偒傑偟偨丅
傑偢偼俹倕値係崋梡偺儘乕僟乕偑曋棙側偺偱丄捠怣懍搙偩偗俁俉係侽侽倐倫倱偵傾僢僾偟偰儊僀儞俠俹倀偵僀儞僗僩乕儖
偟傑偟偨丅
偙傟傑偨俹倕値係崋偱挷傋偨寢壥偺棳梡偱偡偑丄倂俇偼儕傾儖僞僀儉惈偑崅偄巇帠偺俠俹倀偲掅偄俠俹倀傪
暘偗偰暋悢愊傫偱偄傞偺偱摿偵儊僀儞俠俹倀偼懡彮張棟懍搙偑僟僂儞偟偰傕栤戣偁傝傑偣傫丅
俫俉梡倗們們偺巊偄曽傪挷傋偨寢壥丄倂俇偺儊僀儞俠俹倀偵偼幚峴懍搙偑掅偔偰傕丄儔僀僽儔儕偑廩幚偟偰偄偰
巊偄傗偡偦偆偩偲巚偆偺偱丄偙偭偪偵巊偭偰傒傛偆偲巚偄傑偟偨丅
忋敿恎偺専摙
2008.02.10
僔僗僥儉峔惉曄峏偺専摙
崱偼俁屄偺儅僀僐儞儃乕僪偱摦偐偟偰偄傑偡丅張棟擻椡傗巊偭偰偄傞儅僀僐儞儃乕僪偺僺儞悢偺梋桾偐傜尒傞偲
俀屄偵偟偰傕廫暘偵巚偊傑偡丅攝慄偑憹偊傞偺偲丄傗傝捈偟偑柺搢偱偼偁傞偺偱偡偑丄僜僼僩偑彂偒傗偡偔
側傝偦偆側偺偱丄嫻晹儐僯僢僩偺俙俲俬亅俫俉乛俁侽俇俈俥傪傗傔偰丄堏摦儐僯僢僩偺俙俲俬亅俫俉乛俁侽俆俀俥
偺曽偵摑崌偡傞曽岦偱丄俬乛俷儃乕僪偺夞楬恾傪昤偄偰偄傑偡丅
俹俠懁僜僼僩偺堏怉偲惍棟
倁俛俀侽侽俆偑偡偭偐傝婥偵擖偭偨偺偱丄倂俇偺倁俛俇偱嶌偭偰偁傞僜僼僩傪倁俛俀侽侽俆偵堏怉偟巒傔傑偟偨丅
偮偄偱偵倁俠俇偱嶌偭偰偁傞僾儘僌儔儉傕倁俛俀侽侽俆
傊摑崌偟傛偆偐偲巚偄傑偡丅傑偩帋偟偰偄傑偣傫偑丄摿偵僾儘僌儔儉傪捈偡昁梫傕側偝偦偆側偺偱丄嬤偄偆偪偵
倁俛俀侽侽俉傊愗傝懼偊傛偆偐偲傕巚偭偰偄傑偡丅
僗僥儗僆價僕儑儞傪棙梡偟偨嬻娫擣幆偺僾儘僌儔儉偑彂偒偨偄偺偱丄偲傝偁偊偢偼帇妎宯偐傜堏怉偵偐偐偭偰偄傑偡丅
倁俛俀侽侽俆偐傜偼俽俻俴僒乕僶乕俀侽侽俆偑娙扨偵巊偊傞傒偨偄偱丄倁倝倱倳倎倢俽倲倳倓倝倧偺柍椏斉傪揔摉偵僀儞僗僩乕儖
偟偰偄傞偆偪偵丄崱巊偭偰偄傞俹俠偱傕婡擻尷掕斉偑摦偄偰偄傑偡丅偙傟傪棙梡偟偰擣幆寢壥傪僨乕僞儀乕僗壔偟偰傒傛偆偐丒丒丒
側偳偲峫偊偰偄傑偡丅婡擻尷掕偲偄偭偰傕倂俇偵巊偭偰傒傛偆偲巚偭偰偄傞斖埻偱偼丄幚幙揑偵惂栺傪庴偗傞偲偙傠傑偱
巊偆偙偲偼側偄梊掕側偺偱丄廫暘側偙偲偱偟傚偆丅

w6v5d偺夋柺
2008.02.17
PC梡僾儘僌儔儉偺楙廗
2008.03.02
GPS偺峸擖
W6偵愊傔偦偆側GPS儐僯僢僩傪扵偟偰Web傪偟偽傜偔尒偰偄傑偟偨丅斾妑揑彫宆偺丄GPS傪搵嵹偟偨儘儃僢僩
偵偮偄偰偼丄偳偺傛偆偵愊傫偱偄傞偺偐傛偔暘偐傞僒僀僩傪尒偮偗傜傟傑偣傫偱偟偨丅偄偭傐偆傾僂僩僪傾傪
妝偟傓曽乆偑丄僴儞僨傿乕GPS傪PC偵愙懕偟偰巊偭偰偄傞Web僒僀僩偼偨偔偝傫偁傝傑偟偨丅偙偪傜傪尒偨偲偙傠
係慄幃偺僔儕傾儖捠怣偱娙扨偵僥僉僗僩宍幃偱埵抲忣曬傪庢傟傞傜偟偄偲偄偆偙偲偑暘偐偭偨偺偱丄Garmin
偺eTrexH偲偄偆僔儕傾儖僀儞僞乕僼僃僀僗愙懕偺婡庬傪攦偭偰傒傑偟偨丅杮懱偲捠怣働乕僽儖偺僙僢僩偱
\21,000-偱偟偨丅(戝恵偺揹壔僷乕僣偱峸擖偟傑偟偨丅乽偄偄傛偹偭偲乿偺僆儞儔僀儞僗僩傾偲摨偠抣抜偱偡丅)

eTrexH 敔偺幨恀
TEXT OUT偲偄偆儌乕僪偵偟偰PC偵愙懕偟丄僞乕儈僫儖僜僼僩傪婲摦偟偰偍偔偲丄尰嵼偺忣曬偑丄
壓婰偺傛偆偵擔帪丄堒搙丄宱搙丄懍搙
摍偺忣曬傪娷傫偩僥僉僗僩偱侾昩枅丠偵弌偰偒傑偟偨丅偙傟側傜偽娙扨偵W6偵庢傝崬傔偦偆側偺偱椙偐偭偨偱偡丅
@080229120157N3515441E13654564G004+00030E0000N0000U0000
@080229120157N3515441E13654564G004+00030E0000N0000U0000
@080229120157N3515441E13654564G004+00030E0000N0000U0000

eTrexH on W6
偲傝偁偊偢丄偙傫側姶偠偱W6偺奜偵嵹偣偰梀傫偱傒傛偆偲峫偊偰偄傑偡丅
2008.03.23
栰奜憱峴偺弨旛
奜偱GPS搵嵹偺W6偱梀傇偨傔偺弨旛傪偟傑偟偨丅
侾丏GPS搵嵹僗儁乕僗
偁傑傝巊偭偰偄側偄崢偺娭愡傪奜偟偰丄堏摦儐僯僢僩偺忋柺偺奧偲偄偆偐僼儗乕儉偺堦晹傪墑挿偟丄
GPS傪嵹偣傞偨傔偺応強傪嶌傝傑偟偨丅

eTrexH on W6
俀丏幵椫偺夞揮専弌梡僄儞僐乕僟偺栰奜僥僗僩
僄儞僐乕僟偼堦墳僼儗乕儉偺塭偵側傞応強偵晅偄偰偄傞偺偱偡偑丄僾儔斅惢偺僼儗乕儉偱偼捈幩擔岝傪杊偓偒傟偢
僼僅僩僩儔儞僕僗僞偺弌椡偑朞榓偟偰偟傑偄丄堏摦嫍棧偺寁應偑偱偒傑偣傫偱偟偨丅偙偺審偵偮偄偰側傞傋偔娙扨偵
夝寛偱偒側偄偐丄堏摦儐僯僢僩偺傑傢傝偵僉僢僠儞梡傾儖儈僼僅僀儖傪姫偄偰帋偟偰傒傑偟偨丅偙傟偼岠壥偑偁傝傑偟偨丅

傾儖儈僼僅僀儖傪傑偄偰傒傞
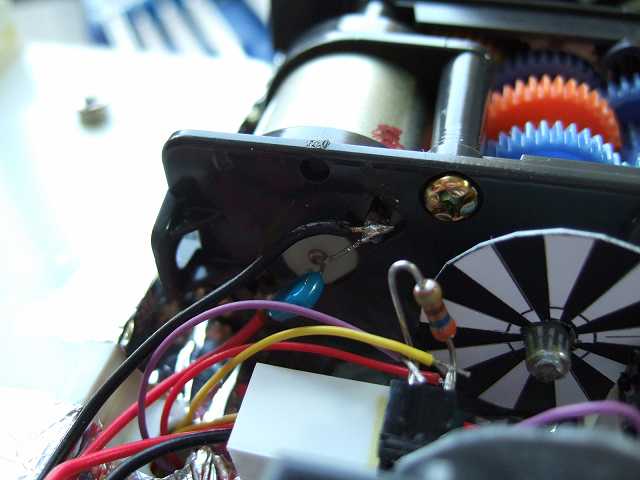
俁丏僺僯僆儞僊傾偺岎姺
媣偟傇傝偵摦偐偟偰傒傞偲丄僊傾儃僢僋僗偐傜偺壒偑戝偒偔側偭偰偄傑偟偨丅挷傋偰傒傞偲僊傾儃僢僋僗偺拞偱丄
儌乕僞乕偺弌椡幉偵晅偄偰偄傞僺僯僆儞僊傾偵僋儔僢僋偑擖偭偰偄傑偟偨丅偙偺僊傾偼丄偄傑傑偱侾乣俀擭偱昁偢
僋儔僢僋偑擖偭偰偄傞偺偱掕婜揑偵岎姺偟偰偄傑偟偨偑丄崱夞偼儈僯係嬱梡偵攧傜傟偰偄偨嬥懏惢偺僊傾偲岎姺偟傑偟偨丅
偙傟偱丄宱擭曄壔傪婥偵偐偗傞昁梫偑側偔側傝傑偟偨丅

僺僯僆儞僊傾偺岎姺乮惵偄庢傝奜偟嵪偺曽偑夡傟偨僊傾乯
奜偱摦偐偟偰傒偰丄偁傑傝偵堏摦懍搙偑抶偄偲姶偠偨偺偱乮晹壆偼嫹偄偺偱丄偙傟偱偪傚偆偳椙偐偭偨偱偡偑丒丒丒乯
僊傾儃僢僋僗傪暘夝偟偨偮偄偱偵僊傾斾傪196.7:1偐傜76.5:1偵壓偘傑偟偨丅傑偩偙傟偱傕1km/h嫮偲抶偄偱偡偑丄儔僕僐儞僇乕
傎偳婃忎偵偱偒偰偄側偄偺偱丄W6偵偮偄偰偼偙傟偱椙偟偲偟偰偍偒傑偡丅偟偽傜偔梀傫偱柺敀偐偭偨傜丄偼偠傔偐傜
栰奜偱梀傇偙偲傪儊僀儞偵峫偊偨儘儃僢僩傪怴嶌偟傛偆偲巚偄傑偡丅
係丏僄儞僐乕僟偺堏愝偲僙儞僒偺曄峏
堏摦儐僯僢僩偺奜偵傾儖儈僼僅僀儖傪姫偄偰偍偔偺偼丄攋傟堈偔偰埖偄偵偔偄偺偱丄僼儗乕儉撪偱僊傾儃僢僋僗偑廂傑偭偰偄傞
晹壆偺撪懁偵傾儖儈僼僅僀儖傪揬傝晅偗傞偲嫟偵丄僄儞僐乕僟傪僼儗乕儉偺拞怱晹偵堏愝偟傑偟偨丅堏愝偵偁偨偭偰崱傑偱偺
僙儞僒偼廂傑傝偦偆偵側偐偭偨偺偱傛傝彫宆偺僔儍乕僾惢GP2S22偵曄峏偟傑偟偨丅

僼儗乕儉撪偵幷岝偺偨傔傾儖儈僼僅僀儖傪揬傞

僄儞僐乕僟偺堏愝偲僙儞僒偺曄峏
俆丏栰奜僥僗僩乮俀夞栚乯
崱夞偺曄峏揰偺憤崌僥僗僩偲偟偰丄栰奜僥僗僩傪峴偄傑偟偨丅堏摦懍搙偲幷岝梡傾儖儈僼僅僀儖偵偮偄偰偼
栤戣偁傝傑偣傫偱偟偨丅僙儞僒偺曽偼僷儖僗傪敿暘偔傜偄庢傝偙傏偡傛偆偵側偭偰偟傑偄傑偟偨丅
晹壆偵婣偭偰偐傜偄傠偄傠挷傋偰傒傞偲丄嬱摦夞楬傪曄偊偢偵僙儞僒偩偗曄偊偨偺偱丄夞楬偺僶儔儞僗偑曄傢傝
丄傑偨儌乕僞乕偺揹帴僲僀僘偵塭嬁傪庴偗傞傛偆偵側偭偰偟傑偄傑偟偨丅傑偠傔偵愝寁傪尒捈偝側偗傟偽偄偗側偄
傛偆偱偡丅

栰奜僥僗僩
僙儞僒偺懳嶔偼傑偨棃廡埲崀偡傞偲偟偰丄弶傔偰奜偱僲乕僩俹俠傪巊偭偰傒偨偺偱偡偑丄夋柺偑埫偔偰
傎偲傫偳尒偊傑偣傫偱偟偨丅偁偲丄栺俁丏俀倠倗偺僲乕僩俹俠傪帩偭偰丄儘儃僢僩偺屻傪偮偄偰曕偔偺偼
廳偐偭偨偱偡丅奜梡偺儘儃僢僩傪嶌偭偨傜丄奜梡偺彫偝偔偰夋柺偺柧傞偄俹俠傪攦偭偰傕偄偄偐側偲
巚偄傑偟偨丅
2008.04.06
僄儞僐乕僟偺僨傿僗僋丄僙儞僒偍傛傃憱峴梡儌乕僞乕偺曄峏
僙儞僒偲夞楬偺憡惈偑媈傢傟偨偺偱丄尦偺僙儞僒偵栠偟偰傒傑偟偨丅偦偟偰丄尦偺僙儞僒偵
崌偭偨僨傿僗僋傪嶌傝丄岎姺偟傑偟偨丅慜夞帋偟偨僙儞僒偺徟揰嫍棧侽丏俇倣倣偵懳偟丄
尦偺僙儞僒偼俇倣倣偱偁傞忋偵丄僙儞僒偺奜宍帺懱傕戝偒偄偱偡丅僨傿僗僋偺暘妱悢傪
尦偺傑傑丄捈宎傪俇侽亾偵偡傞偲丄敀崟傪撉傒庢傟側偄壜擻惈偑偁傞偲巚偄丄暘妱偑慹偄
18暘妱偺僨傿僗僋偲丄尦偲摨偠24暘妱偺僨傿僗僋傪帋偟傑偟偨丅偦偺寢壥丄24暘妱偱栤戣側偐偭偨偺偱
偙偪傜傪嵦梡偟傑偟偨丅

僄儞僐乕僟偺僨傿僗僋
乮360搙18暘妱偺曽乯
偙傟偱憱傜偣偰傒偨偲偙傠丄傑偩偆傑偔憱峴嫍棧傪僇僂儞僩偱偒傑偣傫偱偟偨丅僙儞僒偲夞楬
偲偺憡惈偱偼柍偝偦偆偩偲尵偆帠偱丄儌乕僞乕偐傜偺僲僀僘傪彮側偔偡傞偨傔丄憱峴梡儌乕僞乕
傪儅僽僠偺俼俤亅俀俇侽乮嬥懏僽儔僔乛掕奿揹埑侾丏俆倁乯偐傜俼俠亅俀俇侽
乮僇乕儃儞僽儔僔乛掕奿揹埑係丏俆倁乯偵曄偊偰傒傑偟偨丅俼俠亅俀俇侽偼扨懱偱攧偭偰偄傞
傕偺傪尒偮偗傜傟側偐偭偨偺偱丄僞儈儎偺梀惎僊傾儃僢僋僗僙僢僩晅懏偺傕偺傪巊偄傑偟偨丅

俼俤亅俀俇侽乮嵍乯乛俼俠亅俀俇侽乮塃乯
偙偺忬懺偱丄儘乕僷僗僼傿儖僞偺掞峈偲僐儞僨儞僒傪壗庬椶偐懼偊偰摦偐偟側偑傜丄怣崋傪
僆僔儘僗僐乕僾偱尒斾傋偰傒傑偟偨丅妋偐偵儌乕僞乕偺僲僀僘偼尭偭偨偺偱偡偑丄偠偮偼
儘乕僷僗僼傿儖僞偺偮傕傝偱偮偗偰偄偨掞峈偲僐儞僨儞僒偺偣偄偱彮偟怣崋偑敪怳偟偰偄傑偟偨丅
憱峴懍搙傪忋偘偨偺偱丄僄儞僐乕僟乕偐傜偺怣崋偺廃攇悢偑傾僢僾偟傑偟偨丅
偦偺偨傔丄尦偐傜偁偭偨栤戣偑昞柺偵弌偰棃偨傛偆偱偟偨丅
傾僫儘僌夞楬偵晄姷傟偱丄揔摉側僼傿儖僞偺弨旛偵帪娫偑偐偐傝偦偆偩偭偨偺偱丄寢嬊丄姷傟偨
僜僼僩僂僃傾僼傿儖僞偱嵪傑偣偰偟傑偄傑偟偨丅
偙傫側姶偠偺夁掱傪宱偰偆傑偔摦偔傛偆偵側傝傑偟偨丅傑偨丄摦椡宯摑偺揹埑
偵丄傛傝儅僢僠偟偨丄懴媣惈傕崅偄儌乕僞乕偵岎姺偡傞偙偲偵側偭偨偺偱丄栰奜偱憱傞偺偵
傛傝揔偟偨宍偵側傝傑偟偨丅
憱峴梡儌乕僞乕嬱摦僷儔儊乕僞偺挷惍
僊傾斾傪壓偘偨偙偲丄偍傛傃丄掕奿揹埑偑傛傝崅偄儌乕僞乕偵曄偊偨偙偲偺俀揰偺塭嬁傪
峫椂偟丄憱峴奐巒帪偺揹椡傪傛傝崅偔偡傞條丄儌乕僞乕嬱摦梡俬俠偵梌偊傞俹倂俵僷儖僗偺
僨儏乕僥傿乕斾傪曄偊傞摍偺曄峏傪堏摦儐僯僢僩惂屼梡儅僀僐儞偺僜僼僩偵壛偊傑偟偨丅
2008.04.13
栰奜憱峴僥僗僩
挀幵応偺慄偵増偭偰丄巜掕偟偨嫍棧傪丄嵍塃偺儌乕僞乕偺摨婜傪庢傝側偑傜傑偭偡偖憱傞偐
僥僗僩偟傑偟偨丅俁倣丄俇倣丄侾俀倣丒丒丒係俉倣偲偩傫偩傫嫍棧傪怢偽偟側偑傜條巕傪
尒傑偟偨丅僲乕僩俹俠偲働乕僽儖偱偮側偄偩忬懺偱僥僗僩偟偨偨傔丄捈恑惈偵娭偟偰偼
働乕僽儖偐傜偺奜椡偵傛傞塭嬁偑偄偔傜偐偁傞偩傠偆偲偼巚偄傑偡偑丄俆侽倣憱偭偰丄偍傛偦
摴楬偺侾幵慄偔傜偄偺娫偵廂傑偭偨偺偱丄傑偁偙傫側傕偺偩傠偆偲巚偄傑偟偨丅

栰奜僥僗僩偺條巕
偙傫側姶偠偱栺侾俁侽倣偁傞丄敀慄乮墶慄偼俁倣娫妘乯傪棙梡偟偰僥僗僩偟傑偟偨丅
憱峴宯偺弨旛偑偱偒偨偺偱師偼俧俹俽偺搵嵹嶌嬈偵堏傠偆偲巚偄傑偡丅
2008.04.20
俧俹俽偺搵嵹
eTrexH摍偺捠怣抂巕偵巊偆僐僱僋僞乮倕俀俹倢倳倗乯偲丄偄偮傕偺俁俹僐僱僋僞傪巊偄僔儕傾儖捠怣梡働乕僽儖傪
嶌傝傑偟偨丅

eTrexH梡僔儕傾儖捠怣働乕僽儖
偦偟偰丄堏摦儐僯僢僩偵嵹偭偰偄傞俶倧丏俀僒僽俠俹倀偺俬乛俷儃乕僪偵俁俹偺僺儞僿僢僟傪晅偗丄俙俲俬亅俫俉乛俁侽俆俀俥
僉僢僩偺SCI0偵偮側偑傞僺儞傊攝慄偟傑偟偨丅
偦偺屻丄惂屼僾儘僌儔儉偵eTrexH偐傜偺僨乕僞傪庴偗偰丄忋埵俠俹倀偵偦偺傑傑揮憲偡傞婡擻傪晅壛偟傑偟偨丅
偙傟偱丄倂俇傪宱桼偟偰俹俠偵埵抲忣曬傪庢傝崬傔傞傛偆偵側偭偨偺偱丄弶傔偼俹俠忋偵丄俧俹俽偐傜偺擖椡傪棅傝偵丄
堒搙宱搙巜掕偱偁傜偐偠傔寛傔偨儖乕僩傪扝偭偰堏摦偡傞僫價僎乕僔儑儞僜僼僩傪嶌傠偆偲巚偭偰偄傑偡丅
偦偟偰傾儖僑儕僘儉揑偵姰惉偟偨傜丄儊僀儞俠俹倀偵堏怉偟丄僇儊儔傗挻壒攇僙儞僒偱専抦偟偨忈奞暔傪夞旔偟偨傝丄乽摴乿
傪扝偭偨傝偡傞婡擻偵摑崌偟傛偆偲巚偄傑偡丅
俢俠儌乕僞乕僪儔僀僶俬俠惂屼曽朄偺曄峏
2008/03/23偵僊傾斾傪壓偘偨偙偲偵敽偄丄僊傾儃僢僋僗偺儊僇僯僇儖僼儕僋僔儑儞偑尭偭偨偙偲偲丄堏摦懍搙偑忋偑偭偨偙偲
摍偵傛傝丄曽岦揮姺帪偺惂屼惈偑壓偑傝傑偟偨丅懡彮側傝偲夵慞偡傞偨傔丄儘儃僢僩傪巭傔傞偲偒偵丄廬棃
俿俙俉係係侽俫偺乽僗僩僢僾儌乕僪乿傪巊偭偰偄偨傕偺傪乽僽儗乕僉儌乕僪乿傪巊偆傛偆偵曄偊傑偟偨丅
2008.04.28
俧俹俽偺愙懕僥僗僩
僜僼僩偲僴乕僪偺婎杮揑側晹暘偑弌棃偨偺偱丄GPS偺僨乕僞偑埨掕偟偰庢傝崬傔傞偺偐丄偟偽傜偔摦偐偟偰
條巕傪尒偰傒傑偟偨丅偡傞偲丄側偤偐偄偮傕乽塹惎偐傜偺揹攇偑庛偔偰専抦偱偒傑偣傫乿偺僄儔乕偵側傞偙偲
偵婥晅偒傑偟偨丅偦偟偰丄儘儃僢僩懁偺揹尮傪棊偲偡偲庴怣壜擻偵側傞偙偲偵傕婥晅偒傑偟偨丅
乽偳偆傕儘儃僢僩懁偺夞楬偐傜
弌傞揹攇偺偣偄偱塹惎偐傜偺揹攇偑庴怣偱偒側偔側偭偰偄傞傛偆偩乿偲偄偆傢偗偱娙扨偵妋擣偱偒傞偙偲傪
偄偔偮偐帋偟偰傒傑偟偨丅
- 儘儃僢僩偺揹尮傪棊偲偡丂仺丂庴怣椙岲乮儘儃僢僩偺夞楬偵尨場偑偁傞乯
- 儘儃僢僩偺惂屼夞楬傪慡偰摦偐偟丄僔儕傾儖捠怣梡働乕僽儖偼愙懕偟側偄丂仺丂庴怣晄壜乮働乕僽儖偑儊僕儍乕側
僲僀僘偺揱攄儖乕僩偱偼側偄乯
- DC/DC僐儞僶乕僞偐傜偺僲僀僘偺塭嬁傪妋擣偡傞偨傔丄DC/DC僐儞僶乕僞傪愊傫偱偄側偄俹倕値係崋偺
嬤偔乮俠俹倀偐傜侾俆們倣偔傜偄偺嫍棧乯偱庴怣忬懺妋擣丂仺丂庴怣晄壜乮DC/DC僐儞僶乕僞偑庡側尨場偱偼側偄乯
- 倂俇偺摢偺忋偵俀俆們倣亊俀俆們倣偺傾儖儈斅傪抲偒丄偦偺忋偵俧俹俽傪抲偄偰庴怣忬懺妋擣丂仺丂偁傑傝椙偔側偄
偗傟偳丄庴怣壜擻乮摫懱偺揹帴僔乕儖僪偑桳岠乯
- 傾儖儈斅偺忋偱摦嶌拞偺倂俇偲僔儕傾儖捠怣梡働乕僽儖偱愙懕丂仺丂庴怣忬懺偑彮偟埆壔偡傞偑丄側傫偲偐庴怣壜擻
乮働乕僽儖宱桼偺僲僀僘傕塭嬁偑偁傞乯
埲忋偐傜丄儅僀僐儞儃乕僪偑俧俹俽偵塭嬁偡傞僲僀僘偺敪惗尮偱丄嬻拞傪揱攄偟偰偔傞揹攇偺塭嬁偑戝偒偔丄
僔儕傾儖捠怣梡働乕僽儖偺塭嬁傕偁傞丅偲偄偆傛偆偵寢榑偟傑偟偨丅偪側傒偵倂俇偱偼巭傑偭偰俧俹俽應掕傪
偡傞梊掕側偺偱儌乕僞乕偼慡偰俷俥俥偲偟丄儌乕僞乕偐傜偺僲僀僘偺塭嬁偼挷傋偰偄傑偣傫丅
杮奿揑側寁應傗僲僀僘懳嶔偼戝曄側偺偱丄偲傝偁偊偢俧俹俽傪儅僀僐儞偐傜堦斣墦偄摢偺忋偵丄傾儖儈斅傪傂偄偨忋偱
愝抲偟丄僫價僎乕僔儑儞偺僥僗僩傪峴偆偙偲偲偟傑偟偨丅婥偑岦偄偨傜儅僀僐儞廃曈偺僔乕儖僪傪峴偆偲嫟偵
俧俹俽儗僔乕僶乕傪俆侽們倣偐傜侾倣掱搙偺崅偝偺儅僗僩偺忋偵愝抲偡傞偲偄偭偨懳嶔傪偟傛偆偲巚偄傑偟偨丅
弮惓偺僔儕傾儖捠怣梡働乕僽儖偵偼僼僃儔僀僩價乕僘偑晅偄偰偄傞偺偱丄帺嶌偺働乕僽儖偵傕晅偗偨傎偆偑
椙偄偺偱偟傚偆丅
2008.05.05
俧俹俽偺應掕惛搙
2008.05.11
俧俹俽偺應掕惛搙乮偦偺俀乯
愭廡偼應掕偺惛搙偑戝暆偵掅壓偡傞尨場偑儅僀僐儞偐傜偺揹攇偩偲暘偐偭偨偲偙傠偱偡偑乽僋儘僢僋偺廃攇悢偑
曄傢傟偽弌偰偔傞揹攇偺廃攇悢傕曄傢傞偩傠偆偟丄婎斅偺僷僞乕儞偑曄傢傟偽揹攇偺嫮偝傕曄傢傞偩傠偆乿
偲巚偭偨偺偱丄庤尦偵偁傞暿偺儅僀僐儞儃乕僪傪俧俹俽偵嬤偯偗偰條巕傪尒偰傒傑偟偨丅
AKI-H8/3664F傗AKI-H8/3067F偱偼丄偦傟傎偳塭嬁偑戝偒偔偁傝傑偣傫偱偟偨丅偳偆傗傜AKI-H8/3052F儃乕僪
偲俧俹俽庴怣婡偺憡惈偑椙偔側偄傛偆偱偡丅偦偺偆偪堏摦儐僯僢僩俿倷倫倕侾偺儅僀僐儞儃乕僪
乮AKI-H8/3664F巊梡乯偲姺憰偟偰懕偒傪偟傛偆偲巚偄傑偟偨丅
2008.05.18
僜僼僩偺堏怉
俀寧偵峴偭偰偄偨嶌嬈偺懕偒偲偟偰丄倁倝倱倲倎偺俹俠偵偁傞倁俛俀侽侽俆偺僜僼僩乮w6v5d.exe乯偐傜倂俇傪摦偐偣傞傛偆偵
婎杮揑側婡擻傪堏怉偟傑偟偨丅乮摉柺巊偆梊掕偑柍偄婡擻偼傎偍偭偰偍偒傑偟偨乯
嶌嬈偺弶傔偵w6v5d偺僾儘僕僃僋僩傪倁俛俀侽侽俉偵帺摦曄姺偟丄摿偵栤戣側偐偭偨偺偱丄埲崀倁俛俀侽侽俉傪巊偄傑偟偨丅
栰奜憱峴偵娭楢偟偰丄堏摦儐僯僢僩傪惂屼偡傞俶倧丏侾僒僽俠俹倀偺捠怣僾儘僩僐儖偲偄偆偐丄僐儅儞僪
偺峔憿傪曄偊傑偟偨丅偦偙偱丄偦傟偵懳墳偝偣傞偨傔丄俶倧丏俀僒僽俠俹倀偲儊僀儞俠俹倀偺捠怣晹暘傕彂偒姺偊傑偟偨丅
2008.05.25
俷倫倕値俠倁
2008.06.01
俷倫倕値俠倁
偱偒傟偽丄偄傑庡偵巊偭偰偄傞倁倝倱倲倎亄倁倝倱倳倎倢丂俠亄亄俀侽侽俉俤倶倫倰倕倱倱俤倓倝倲倝倧値
偺娐嫬偱巊偄偨偄偲巚偄丄偱偒傞偐
偳偆偐帋偟偰傒傑偟偨丅
僴儅傞偺偱偼丠偲丄偪傚偭偲恎峔偊偰偄傑偟偨偑摿偵栤戣側偔摦偒傑偟偨丅偨偩丄俀偮帋偟偨僒儞僾儖僾儘僌儔儉偺
偆偪偺曅曽偱俠倛倕亅倕倸偑僨僶僀僗偲偟偰擣幆偝傟側偐偭偨偺偱丄僒儞儚僒僾儔僀偺俠俵俽亅倁俀俁俽俤俿俽倁偲偄偆
俁侽枩夋慺偺倂倕倐僇儊儔傪侾屄侾俋俉侽墌偱攦偭偰偒傑偟偨丅俷倫倕値俠倁偱暋悢偺僇儊儔傪
摨帪偵埖偭偨傝丄僗僥儗僆價僕儑儞偺張棟傪偟偨傝偲偄偆椺偑倂倕倐偱娙扨偵尒偮偐偭偨偺偱丄摨偠僇儊儔傪俀屄
攦偭偰偒傑偟偨丅

俠俵俽亅倁俀俁俽俤俿俽倁
乮悗偲偟偰庤偠偐偺僿儖僺儞僌僴儞僘偵晅偗偰傒傑偟偨丅僇儊儔偺戝偒偝偼俿倰倕倴倎偲戝懱摨偠側偺偱丄倂俇偺摢偵傕
撪憼偱偒傞戝偒偝偱偡丅乯
愭廡偐傜峫偊偰偄偨偺偱偡偑丄偄傑嶌嬈拞偺倁倝倱倳倎倢俛倎倱倝們俀侽侽俉偺僾儘僌儔儉偐傜俷倫倕値俠倁傪巊偍偆偲偡傞偲丄
偄傠偄傠挷傋傞偙偲傗丄嶌嬈偑懡偦偆偩偲巚偄傑偟偨偑丄尦偺倁倝倱倳倎倢俠亄亄倁倎倰俇偱嶌偭偨丄彴偵嶶傜偽偭偨
儃乕儖傪廤傔偨傝偡傞僾儘僌儔儉乮倂俇倴俁倓乯偺傎偆偵偼娙扨偵摑崌偱偒偦偆側偙偲偵丄婥偑偮偄偨偲偄偆偐丄巚偄弌偟傑偟偨丅
偦傫側傢偗偱倂俇倴俁倓偺僜乕僗傪倁俠亄亄俀侽侽俉偱僐儞僷僀儖偟偰傒傑偟偨丅偡傞偲丄僔儕傾儖億乕僩憖嶌梡偺
倕倰倱倢倝倐偱僄儔乕偑弌傑偟偨丅倁俠亄亄俀侽侽俉偺僟僂儞儘乕僪儁乕僕傪撉傓尷傝偼俹倢倎倲倖倧倰倣俽俢俲偼
尦乆娷傑傟偰偄傞傛偆偱偡偑丄壗偐堘偆傛偆偱偡丅埲慜偺傕偺傪巊偊偽捛壛挷嵏偑梫傜偢庤偭庢傝憗偄偩傠偆偲巚偄
丄屆偄傎偆偺俹俠偐傜倁俠亄亄俀侽侽俆偺帪偵巊偭偰偄偨俹倢倎倲倖倧倰倣俽俢俲傪僐僺乕偟丄僷僗傪捠偟傑偟偨丅
偡傞偲丄僄儔乕偑廂傑傝丄倂俇偲捠怣偱偒傞傛偆偵側傝傑偟偨丅
倂俇偺僇儊儔偺僨乕僞傪俷倫倕値俠倁偱夋憸傪曐帩偡傞峔憿懱偵僙僢僩偡傞晹暘偩偗嶌傟偽丄儔僀僽儔儕乕偑
棙梡偱偒偦偆側偺偱丄傑偢偙偙傪嶌偭偰梀傫偱傒傛偆偐偲巚偄傑偟偨丅尦乆倂俇梡偵俠偱嶌偭偨夋憸擣幆梡偺
娭悢偲丄懳墳偡傞俷倫倕値俠倁偺娭悢偺巊偄曽偑帡偰偄傞偺偱丄傢傝偲倂俇偺婛懚僾儘僌儔儉偲憡惈偑
椙偝偦偆偩偲巚偄傑偟偨丅
暿偺儘儃僢僩傊偮偯偔
2010/10/07
嵞奐
傾乕僗丒儘乕僶乕侽侾傪堦捠傝嶌偭偨偺偪丄傕偆彮偟寉偔偰帩偪塣傃傗偡偄丄帇妎偺幚尡偑偱偒傞堏摦儘儃僢僩傪
嶌傝偨偔側傝傑偟偨丅偦偙偱丄mbed LPC1768偺楙廗梡偵倂俇偺堏摦儐僯僢僩傪惍旛偟偰丄偦偺傑傑嫻晹儐僯僢僩傪
嵞惂嶌偟丄儕乕儌乕僩僽儗僀儞曽幃偺堏摦儘儃僢僩偲偟偰嵞奐偟傑偟偨丅偙偺愭偼偦偺婰榐偱偡丅
倂俇倴係偺儁乕僕傊
栠傞