概要
車両型のロボットです。作り始めた時点では、”車両型ロボット2”
とあまり変わりませんでした。主な相違点は、材質を木からプラスチックにした点と、
前進用と旋回用のモーターに分け、直進すること自体に配慮が要らなくなった
点です。
このロボットでは、ナビゲーションに関して結構色々なことを試しました。 そして測定データ、写真、ビデオその他の資料も良く残っていますので、 そのうちにもっと詳しいホームページとしてまとめるつもりでいます。
| 寸法 | --- * --- * --- |
| 重量(本体) | 約 500 g |
| 電源 |
単1乾電池 * 1/走行&アーム用 5 V / 6 A スイッチングレギュレーター |
| モーター |
マブチRE-140 * 1/走行用 マブチRE-140 * 1/アーム用 |
| 外界センサー |
超音波距離計 焦電センサー 磁気コンパス ジャイロコンパス CDS |
| 内界センサー |
走行距離計 アーム位置センサー |
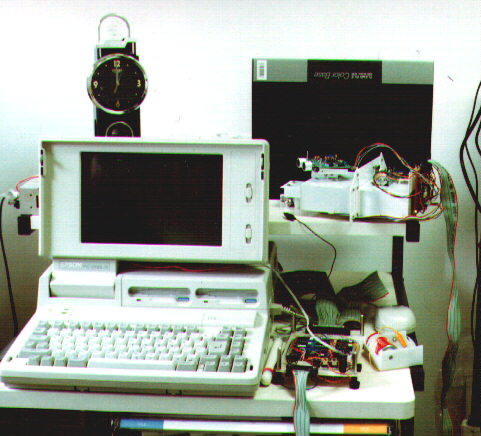
開発環境
PC-286LS、MS-DOS3.3、Quick C 2.0の構成でプログラムを開発しました。
実験項目/製作の目的
1.使ったことのない部品を試す。
2.C言語の練習
3.超音波センサーを利用した屋内環境でのナビゲーション
(1)ビルの廊下のような人工の環境を、床に引いた線のようなガイドなしで
部屋から部屋まで移動する。
(2)超音波センサでスキャンした結果得られるレーダーチャートの解釈
ロボット用に、特別に用意したランドマークに頼らず、柱の角などの
建物に元々あるものをランドマークとして使用できるようにする。
(3)あらかじめ入力してある建物内部の地図を元にして、積算走行距離と
スキャン結果を利用した現在位置の割り出し。
(4)地図に無い障害物の回避
4.屋外でのナビゲーション(カレンダー、太陽の方向、緯度、経度からロボットの向きを計算)
ソフトウェア
機構部
制御回路

|
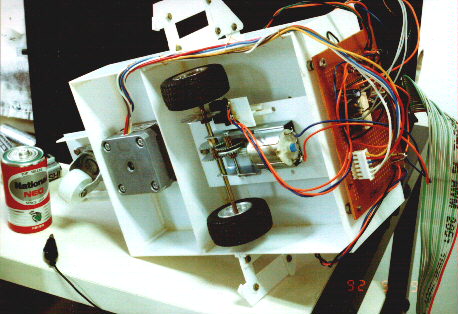
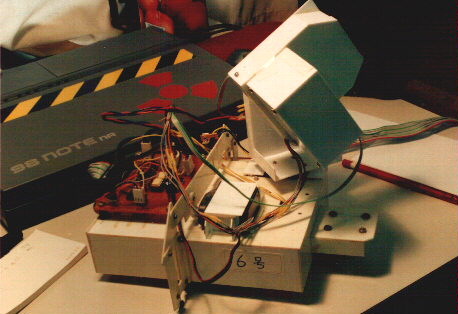
実験開始直後(92年5月)の写真です。このロボットは、片側のタイヤ をアームで持ち上げることで旋回します。 この頃は、アームの駆動軸に位置検出用のフォトインタラプタを付けたDCモーターを使っていました。 |
|
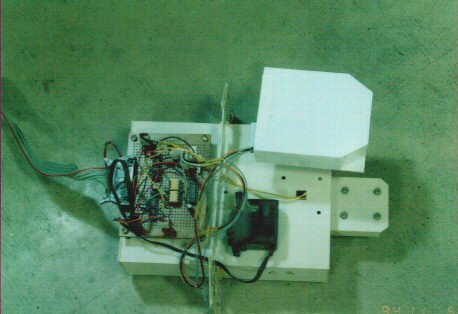
92年5月の裏面です。超音波センサーの向きを変えるために、 ステッピングモーターを使用していました。専用ICを使わずにソフトで 駆動波形を作っていました。 |
|
93年7月の写真です。当時新発売の圧電振動ジャイロ を試したときの構成です。 |
|
94年11月の写真です。旋回用アームと超音波センサー スキャン用モーターを、ラジコン用サーボモーターに変えました。 プログラムが簡単になり、重量も少なくなりました。 |
|
95年の写真です。センサーヘッドを3次元スキャン 出来るようにしました。センサーヘッドには、超音波センサ、 焦電センサ、Cdsが付いていました。 |

|
96年の写真です。ポケコン、バッテリー、制御基板を工具箱にセットし、 PC用の制御プログラムの一部をポケコンへ移植して、部屋の外を走らせました。 |
|
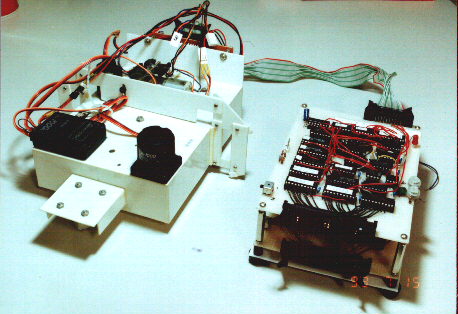
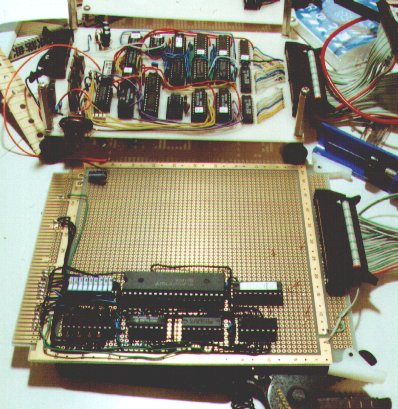
手前の基板がPCの拡張スロットに入れて使用するパラレルIOボードで、奥の方が
自分ではメインボードと呼んでいる制御基板です。 パラレルIOボードの基板は、 サンハヤトのPC9801のCバススロット用の蛇の目基板を使用し、上には アドレスデコーダー回路と8255AP5が一つ載っています。8255の外に74LS273が一つ 付いていて、入出力切り替え可能なポートが8bit*3、入力専用ポートが8bitあります。 メインボードには走行用モーターON/OFF用のディップリレー、走行距離と超音波距離計用の バイナリカウンタ、ステッピングモーター駆動用のトランジスタが載っています。 RCサーボを使うときは、メインボードに重ねてサーボコントローラーボードを接続していました。 |