概要
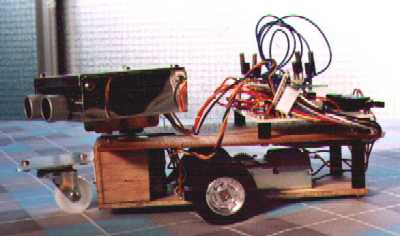
PC-100からIOボードを通して有線制御するロボットです。
2個のモーターでタイヤを回すことによって走行します。
向きを変えられる超音波距離計と、走行距離計が付いています。
超音波距離計でスキャンすることにより、作成したレーダーチャートを
解釈して地図を作り、走行する実験をしました。
| 寸法 | 15cmくらい |
| 重量(本体) | 300gくらい |
| 電源 |
単3ニッカド電池 * 2/走行用 5 V / 6 A スイッチングレギュレーター |
| モーター |
マブチRE-140 * 2/走行用 ステッピングモーター(センサー回転用) |
| 外界センサー | 超音波距離計 |
| 内界センサー |
走行距離計 |
開発環境
NEC PC-100/N100ベーシック
1988年当時、中古で買える16bitのパソコンの中では、かなり安い部類でした。
本体とモニターで8~9万円位だった気がします。メインメモリがおかしい様で、
ふと気づくとフリーズしていました。自分で修理するつもりでいろいろと調べましたが、
修理ができるまでの知識が揃った頃には、修理の意味が無くなっていました。
(金銭面や新型パソコンの性能の面で)
実験項目/製作の目的
超音波距離計によるレーダーチャートからランドマークを検出する。
検出結果と、予め与えた地図とのマッチングによって屋内での
ナビゲーションを行う。
想定していたのは大きな病院のような建物で、ロボット用の特別な
ランドマーク無しで、部屋から部屋へ移動することを目標にしていました。
ソフトウェア
このロボットはベーシックでプログラムしたので、コーディングの上では
あまり明確に見えないのですが、階層構造をイメージしています。
(オーソドックスなロボットプログラミングの考え方ですね、
いわゆる”教科書どうり”と言うやつでしょうか?)
以下に簡単な例を示します。
↑
レベル2(一連の動作)
・180度の超音波距離計のスキャン
・X,Y方向の相対距離入力による移動
↑
レベル3(プリミティブな動作)
・超音波距離計の読み取り
・タイヤを一定の角度回転させる
機構部
2個のモーターで2個のタイヤを駆動します。それぞれの軸には
スリットの入った円盤が取り付けられています。
このスリットを、透過型フォトインタラプタで読み取ります。
フレームは、2mm厚のベニア板でできています。フレームの材料費は 50円ほどでした。
制御回路
2個のモーターをON/OFF、正転・逆転させるための4個のディップリレー
走行距離計用(2個)、超音波距離計用(1個)の合計3個の8bitバイナリカウンタ
ステッピングモーター駆動用トランジスタ
外界センサー
超音波距離計(2000年現在でも売っている秋月のキットです)