概要
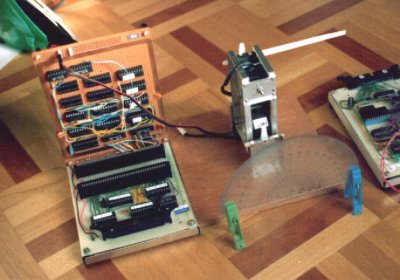
MSXパソコンからIOボードを通して有線制御するロボットです。
うまく出来たら自由度8の4足歩行ロボットにするつもりで作り始めました。
しかしいくつかの問題が解決できなかったので、写真に写っているところで終わりでした。
今にして思うと、「何であんなところでつまずいたかな〜」という気がします。
後の6足歩行ロボットは、結局MSXと大差ないCPUパワーで動かせたので、
手持ちの材料で完成できる可能性もあったと思います。
分かってしまえば何てことはないけれど、分からないと1歩も進めないといったような、
まあ技術的なノウハウとはそんなものなのでしょう。
この時に作ったサーボコントローラーとほぼ同じ回路で「W4」、「L2」、「R魚1」 のサーボモーターも動かしました。しかし110×160mmの基盤に4Chしか載せられないので、 この回路にトルクが33N・cm(3.3Kg・cm)のサーボを組み合わせては、総重量の都合で自立型の 多脚歩行ロボットを作るのは無理だと思いました。
そういえば当時は資金不足でオシロスコープを持っていませんでした。 そしてこの時は下に書いた分解能が出ない理由が分かりませんでしたが、 後でオシロで見てみると、データ書き込みのタイミングが悪く、 データ書き込みの度に信号が途切れてるというのがすぐ分かりました。
制作断念の主な理由
・ベーシックで逆運動学計算をしていたのですごく遅い
・3度刻み程度の低分解能
開発環境
MSX/MSXベーシック/ベーシックコンパイラ
実験項目/製作の目的
・逆運動学計算のテスト
・多脚歩行ロボットの脚のテスト
・サーボコントローラーのテスト
ソフトウェア
リアルタイム制御ソフト
動作シミュレーションソフト
サーボコントローラー
下図に示すような基本構成になっています。クロック1はサーボ出力信号の周波数
を決めるクロックです。(クリアピンに接続)クロック2は出力信号のハイレベル持続時間
を計るためのクロックです。(クロックピンに接続)
こういう回路ですので多チャンネル化しようと思うと基板が大きくなります。
サーボモーター
三和 SM−391×2個