僐儞僙僾僩偲奣梫
|
偩傫偩傫偲怑応偵儘儃僢僩傾乕儉傪慻傒崬傫偩帺摦壔愝旛傕憹偊偰偒傑偟偨丅摦偄偰偄傞偺傪尒傞偲偗偭偙偆柺敀偄偺偱
摦偔柾宆傪嶌偭偰梀傫偱傒傛偆丄応崌偵傛偭偰偼嫵堢梡偵巊偭偰傒傛偆偐丒丒丒側偳偲巚偄丄埲慜嶌偭偨儘儃僢僩偺儕僒僀僋儖晹昳偲丄
摿掕偺巊偄摴傪峫偊偰偄側偄丄屆偄晹昳傗嵽椏傪巊偭偰嶌傝偼偠傔傑偟偨丅
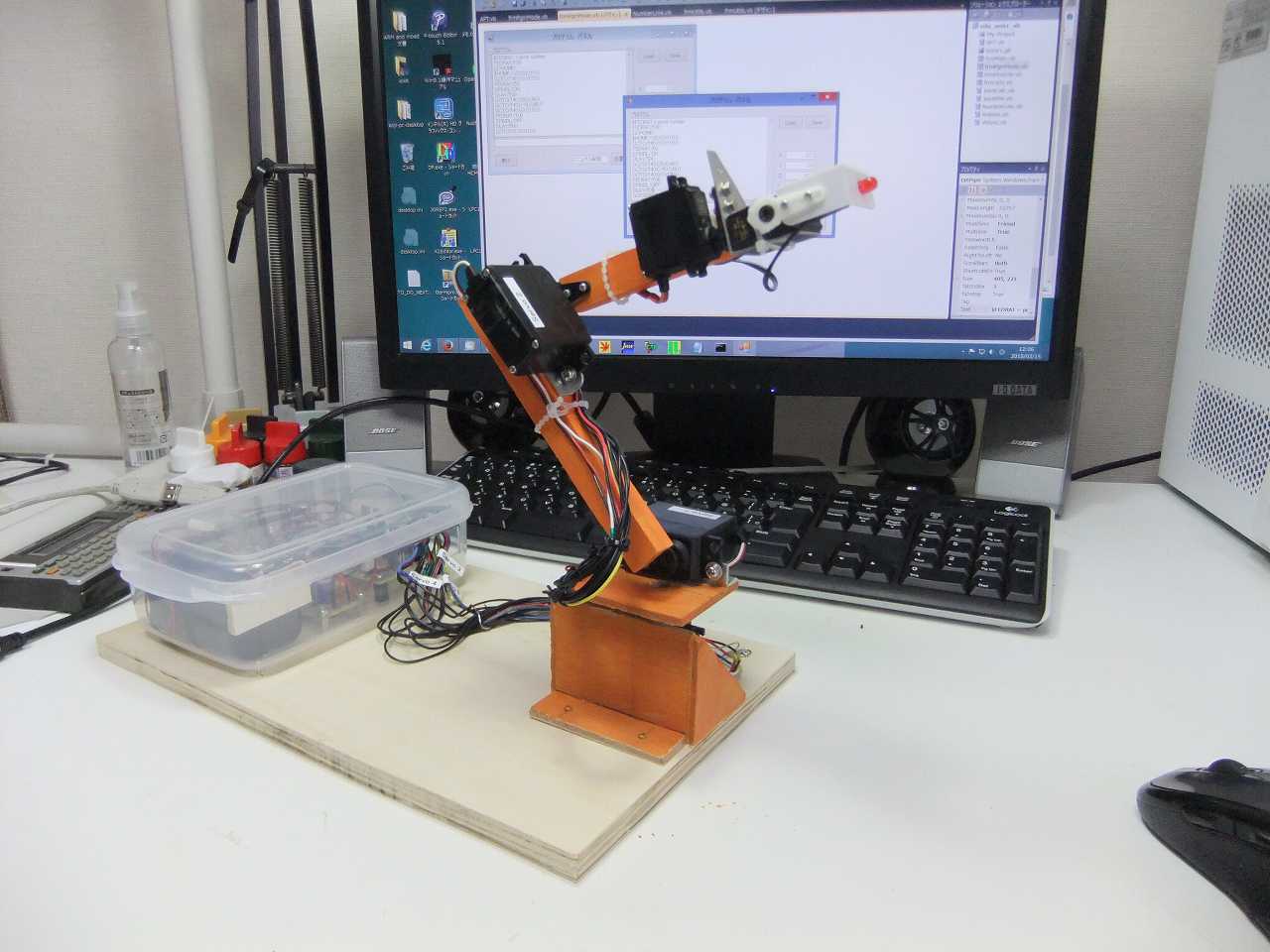
帺桼搙俆偱丄俼俠僒乕儃偼俀俴俀偐傜丄儅僀僐儞偲揹尮儐僯僢僩丄揹抮偼倀俶俬偐傜偺暔傪巊偄傑偟偨丅僜僼僩僂僃傾偺 僐儞億乕僱儞僩偼倀俶俬偲俀俴俆偐傜棳梡偟傑偟偨丅僄儞僪僄僼僃僋僞偼揾憰儘儃僢僩偺僀儊乕僕偱丄愭抂偑巜偟偰偄傞 応強偑暘偐傞傛偆偵LED傪晅偗傑偟偨丅 恎嬤偵偁傞嶻嬈儘儃僢僩偺儘儃僢僩尵岅偵帡偣偨僾儘僌儔儉偱摦偔傛偆偵偟偰傕柺敀偄偐側丄偲巚偄傑偟偨偑丄傑偢偼 帺暘偑姷傟偰偄傞乽俶俠岺嶌婡夿偺僾儘僌儔儉乿偺梫椞偱摦偒傪僾儘僌儔儉偱偒傞傛偆偵偟傑偟偨丅 峔憿晹昳偼丄俀俴俆梡偺挷惍僗僞儞僪傪嶌偭偨帪偵丄攦偄偡偓偨栘嵽傪巊偄傑偟偨丅 儂乕儉僙儞僞乕偺抂嵽僐乕僫乕偱攦偭偨傕偺側偺偱丄慡晹偱侾侽侽墌偔傜偄偱偟偨丅 |
摦嶌僨儌
偺弴偵摦偒傑偡丅
僼儗乕儉偑曅帩偪偺幉偱崉惈偑掅偄偺偲丄怳摦傪梷偊傞 |
幨恀乮僋儕僢僋偱奼戝乯

|
 |
 |
 |
|
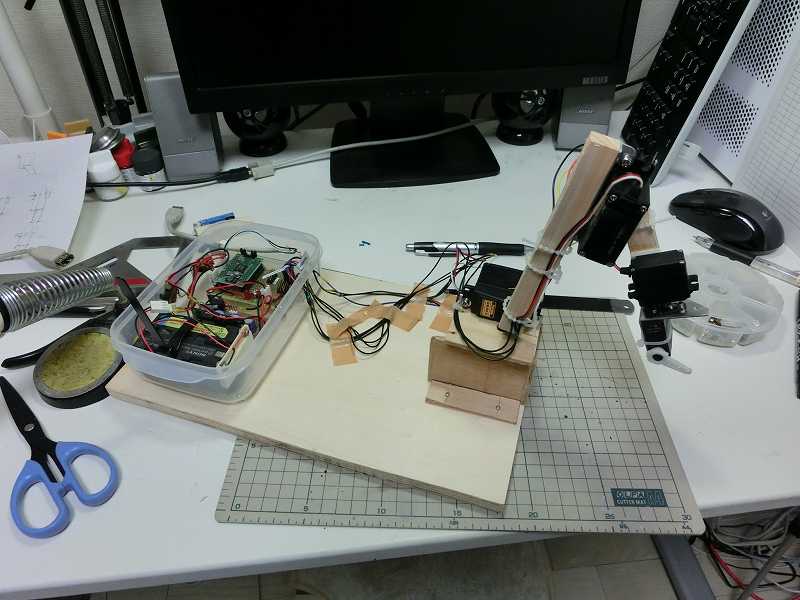
傾乕儉杮懱 RC僒乕儃傪妏嵽偱偮側偓傑偟偨 |
儀乕僗偵搵嵹 傾乕儉偲儅僀僐儞傪儀乕僗偵 庢傝晅偗傑偟偨 |
姰惉 僆儗儞僕偵揾憰偟偰姰惉偱偡 |
僾儘僌儔儉僷僱儖 摦偒傪僾儘僌儔儉偡傞夋柺偱偡 |
| 榬偺挿偝 | 栺300mm |
| 帺桼搙 | 俆 |
| 俼俠僒乕儃 |
FUTABA S9303亊3, 懠彫宆僒乕儃亊2 |
| 揹尮 | 儕僠僂儉僀僆儞揹抮乮7.2V 19.4Wh乯 |
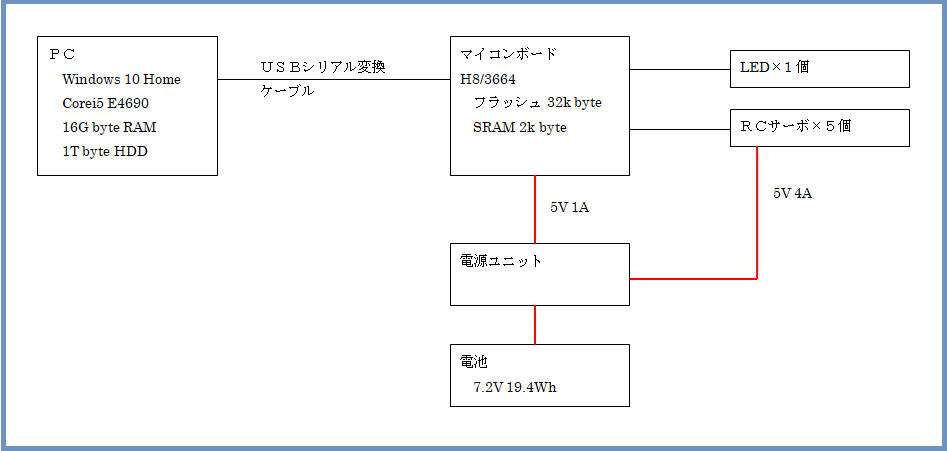
| 俠俹倀 |
Windows 俹俠 H8 3664 |
僔僗僥儉峔惉
|
俹俠偺拞偱儘儃僢僩傾乕儉偲偟偰偺摦偒偐傜丄奺娭愡偺妏搙偺寁嶼傪峴偄傑偡丅 儅僀僐儞偼俹俠偐傜憲傜傟偰偔傞暥帤偺宍偺娭愡妏搙僨乕僞傪俼俠僒乕儃偺惂屼梡偺怣崋偵曄姺偟丄RC僒乕儃傊拞宲偟傑偡丅 儌乕僞乕偼椡傪弌偡弖娫偵儅僀僐儞偲斾傋偰戝偒側揹棳傪昁梫偲偡傞偺偱丄揹抮偼侾偮偱偡偑揹尮儐僯僢僩偱 2宯摑偵暘偗偰偄傑偡丅揹抮偼椉曽偺宯摑偵晄懌側偔揹椡傪嫙媼偱偒傞弖娫揑側弌椡偲梕検傪帩偭偨婡庬偵偟偰偄傑偡丅 梋偭偰偄傞傕偺偱嶌偭偨偺偱丄嶌偭偨俀侽侾俆擭帪揰偱傕屆偄晹昳偱弌棃偰偄傑偡丅俀侽俀侾擭尰嵼丄怴偟偔嶌傞偲偟偨傜 埲壓偺條偵曄偊偨傜偄偄偐側丄偲巚偄傑偡丅
|
儂乕儉傊栠傞