書きこみ順は、新しい物から古い物の順です。
19.05.06
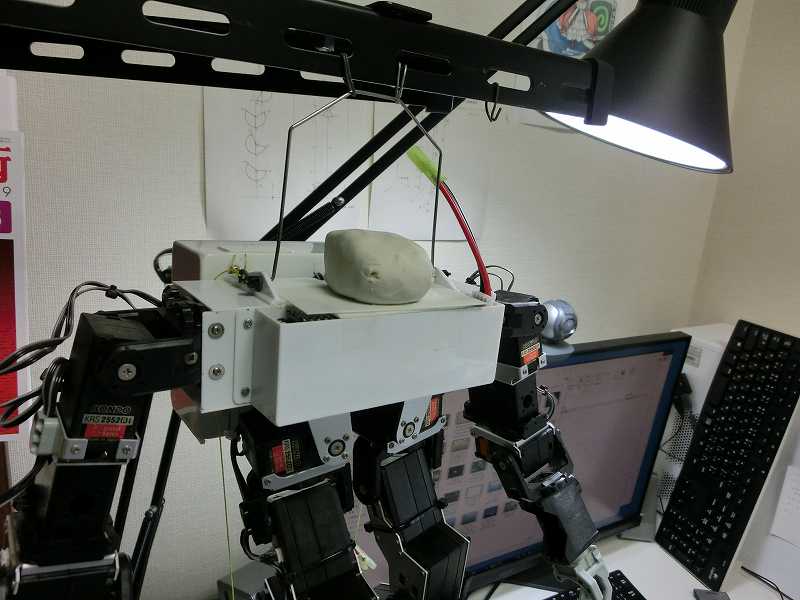
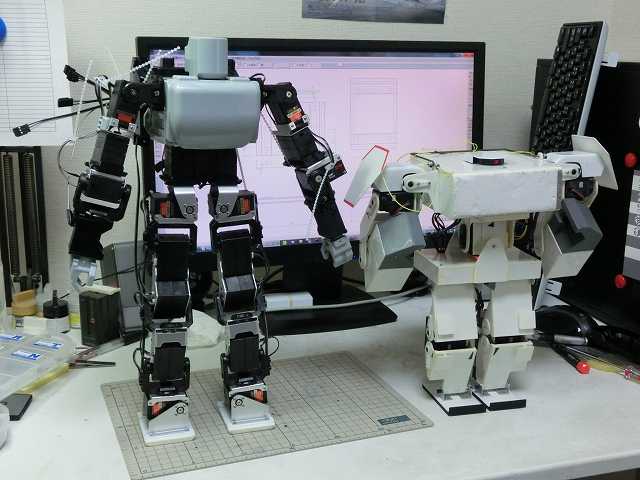
LSM9DS1の統合
モーションセンサーとして初めて載せてみたLSM9DS1を、姿勢安定化のルーチンに組み込んでみて、ちゃんと動いているか様子を見てみました。
校正用の装置的なもを作るのも大変なので、分かりやすく、ロボットを立たせている台を傾けてみて、
傾斜に合わせて上体を垂直に保つ動作を作ってみました。
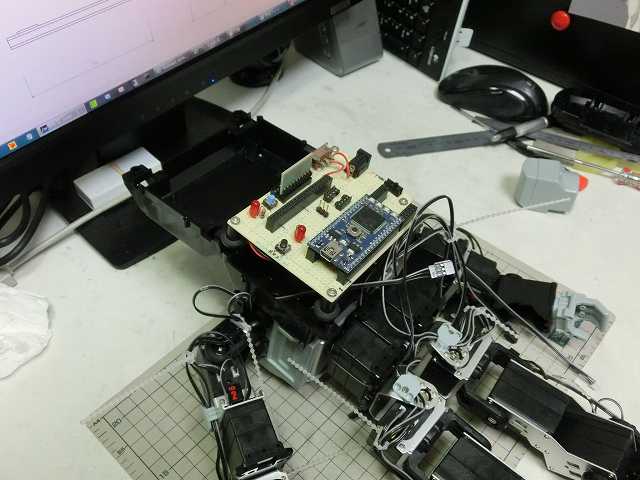
これまでのところで、Nucleo-F401RE自体の能力はだいたい分かった感じがするので、今日の所はお手軽に外部電源+PCからの制御
で試してみました。
2015年に動かして以降、RCサーボのキャリブレーション(関節パラメータファイルの調整)を行っていないので、各関節が
狙った角度からけっこうズレていて、左右に同じだけ体を傾けたはずが、片方の足裏が地面から少し浮いたりなどありましたが、
とりあえずの確認は出来ました。
足先の軌道で座標を指定するとき、実際のところ水平で平らな場所しか歩けなかったので、
足裏を水平以外の角度にする計算を省いていましたが、搭載マイコンの計算パワーも上がってきたので、傾斜面ぐらいには対応してゆきたいとうことで、
全身の動作確認に先立って2L1以来省いていた部分を復活しました。
「顔」の試作検討
肩の上が寂しいので、顔というか、飾りの頭でも載せようか・・・と言う事で検討しました。
たまにはいつもと違うやり方でやってみようと、油粘土でいくつか作ってみて、気にいったものを
紙粘土で作って見ることにしました。油粘土と紙粘土は共に、近くのスーパーの学用品売り場
で購入した、子供用のものを使ってみました。

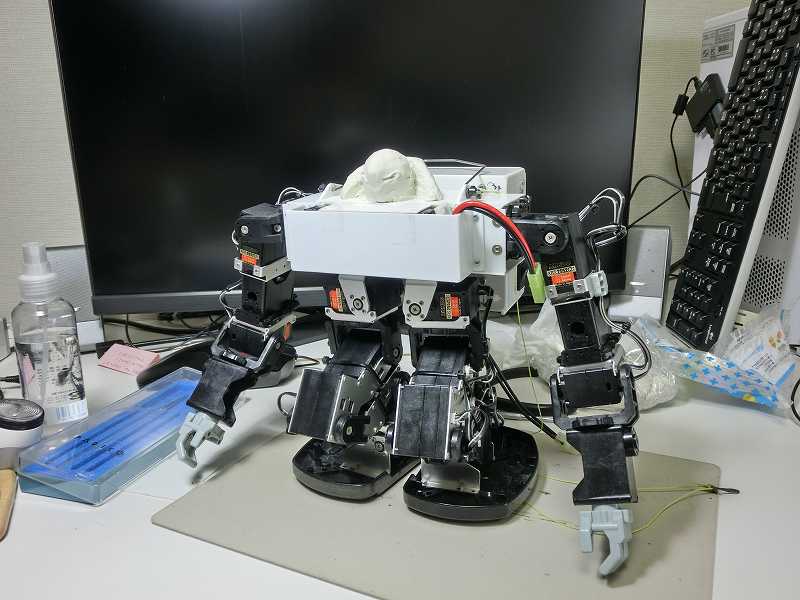



油粘土バージョン いろいろ。
結局5番目のやつに決めて紙粘土で作ってみました。

紙粘土バージョン
この紙粘土は、パッケージに「出来上がりが軽い」と強調してあるだけあって、密度高めの
発泡スチロール程度の比重と硬さでした。
油粘土は、匂いで子供の頃の記憶が呼び覚まされる・・・かと思いましたが、船内工事で
壁の電線貫通穴に詰めておく粘土と同じ匂いだったので、前の職場を思い出しました。(笑)
19.03.27
処理能力の確認
「マイコンの計算パワーを見てみる」という目的で考えを進めたところ、「足の座標を与えて、その状態の各サーボの角度
を求めるサブルーチン」が、2l5v1_vcの歩行時の位置情報の更新周期である1秒あたり100回以上実行できることが確認できれば、
ひとつのマイルストーンになると思いついたので、一番基本的な膝の屈伸動作で確かめてみました。
具体的には、遅延が無い場合、100Hzで回るループにて足先の軌道を100分割したモーションを、1秒で再生できれば目標達成と
判断しました。
DSPを使わなくても、とりあえず必要な速度が出ている事が確認できたので、より手間がかかる歩行動作の移植に
進むこととしました。
19.03.17
制御ソフトの移植
マイコン側は、PCからモーションデータを受け取りながら歩行動作が出来る所まで移植が出来ましたので、
次はPC側でモーションデータを生成していたプログラム(2l5v1_vc)を、マイコンへ移植というか、最低限の部分を切り出して、
マイコンのプログラムへ統合する作業に入りました。
2l5v1_vcには、例えば「腰の高さを一定にして歩く」とか「接地相の脚の膝を伸ばして歩く」とか、複数の条件が違う
歩行モーションを生成するクラスが実装されています。今回の「マイコンの計算パワーを見てみる」目的には、そのうち1つあれば
用が足りるので、統合後のバイナリサイズを小さくする意味でも、冗長な部分を削る作業をしました。
スイッチボードの取り付け
Nucleoは、バイナリ書き込み後に自動でリセットがかかるので、リセットスイッチをスイッチボードへ引き出す必要は無いか・・・
と、初めは思っていたのですが、いざ動かしはじめると不便だったので、以前と同じ場所に復活しました。
19.03.03
制御ソフトの移植
以前歩かせていた時の続きから・・・と考えて、ソフトの移植を始めました。
主な変更点は、外したサーボと通信する部分を通らないようにする事、モーションセンサーが変わったので、
センサーにアクセスする部分を書き換える、程度で動作確認をしてみました。
マイコンとRCサーボ(KRS2552R)との通信は1,250,000bpsで特に問題ありませんでした。PCとマイコンの通信に関わる
部分もそのまま行けるかと期待していましたが、前のマイコンのLPC1768の時と同じボーレート921,600bps
ではデータの取りこぼしが起きて速度を下げざるをえませんでした。
今回は歩行時の制御がPCからではないので、115,200bpsで調整等を行うことにしました。

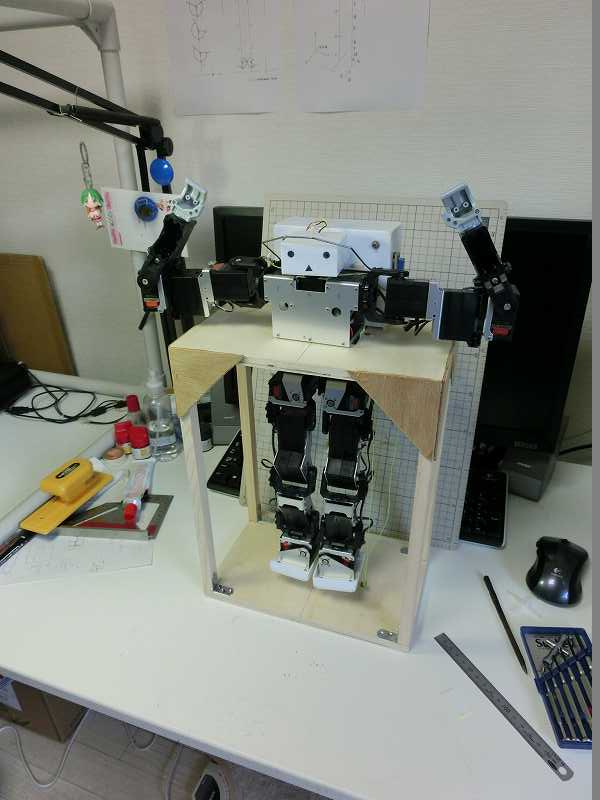
ハンガーに吊るして調整中
19.02.17
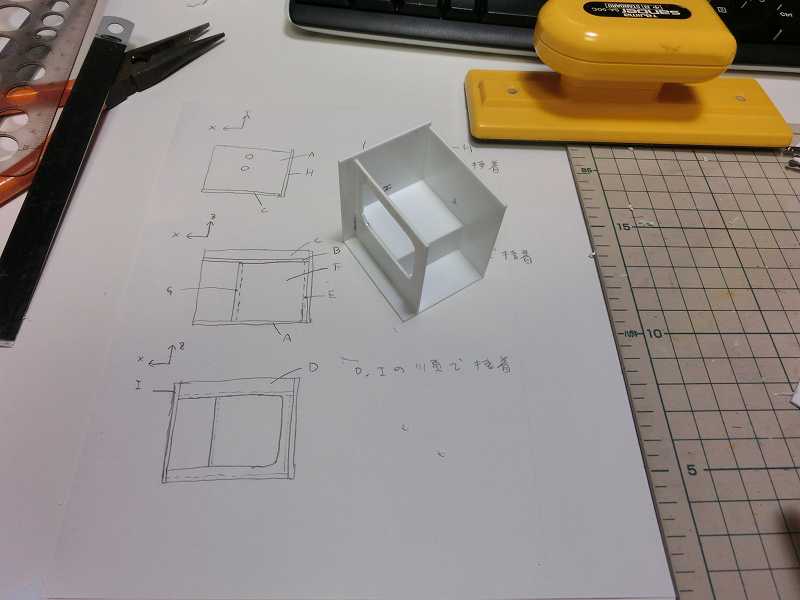
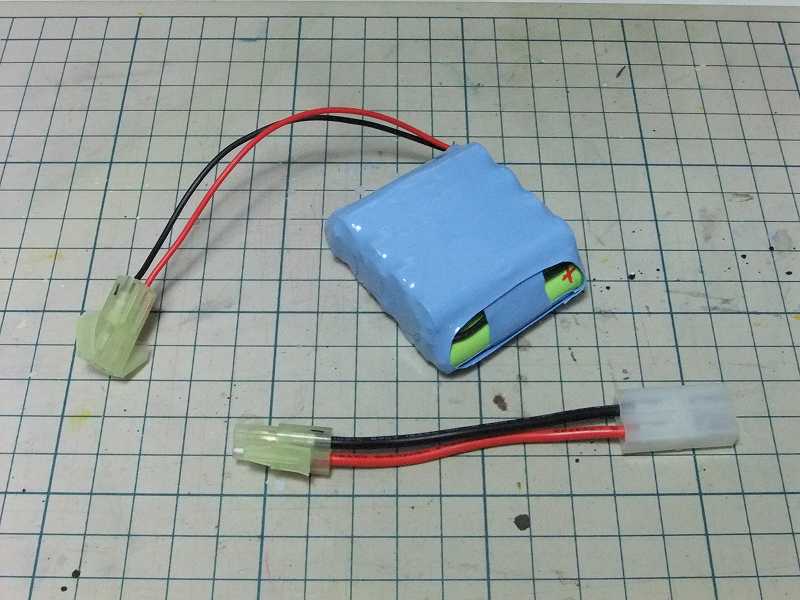
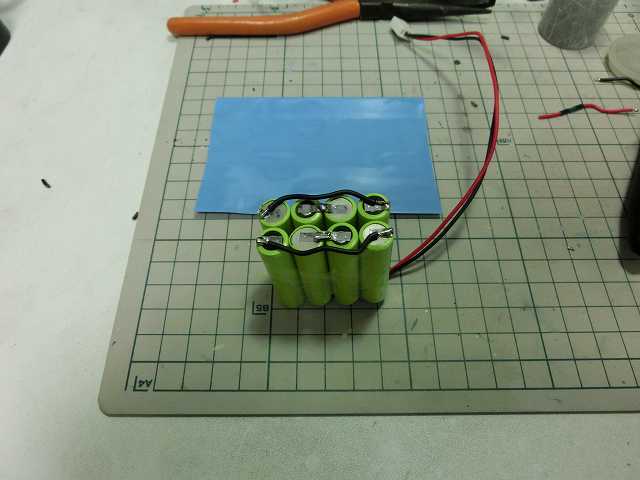
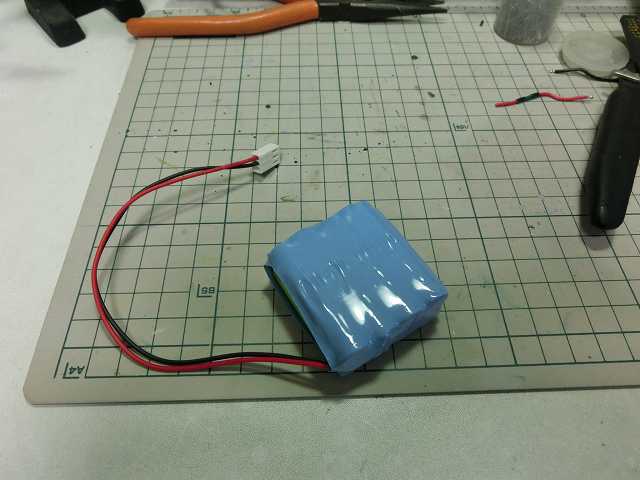
バッテリーボックスの製作
胸の位置にバッテリーを付けるための部品を作りました。納めるバッテリーは、2019/1/20の所で
搭載予定とした9.9V 900mAh 30CのLifeバッテリーです。
バッテリーを入れた状態

バッテリーを出した状態
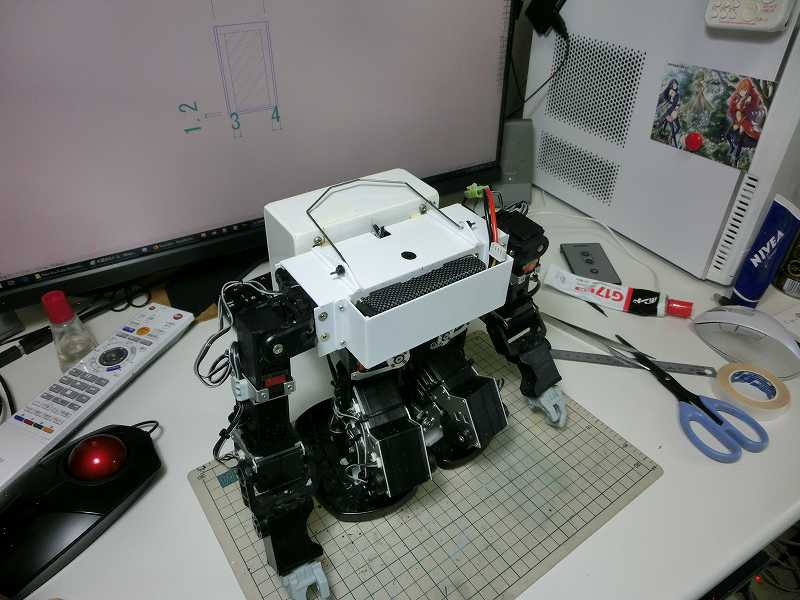
19.02.11
バックパックと取っ手の取り付け
先週作ったフレームパーツ(胸部フレームと呼ぶことにします)のネジを全て取り付けた後、それらのネジを避けてバックパックの取り付け
用木ネジの穴位置を決めて、バックパックを取り付けました。その後、これまで使ってきたピアノ線製の
取っ手を付けるためのアイプレートを胸部フレームに接着し、取っ手を付けました。

マイコンボードの取り付け状態


バックパックの取り付け状態
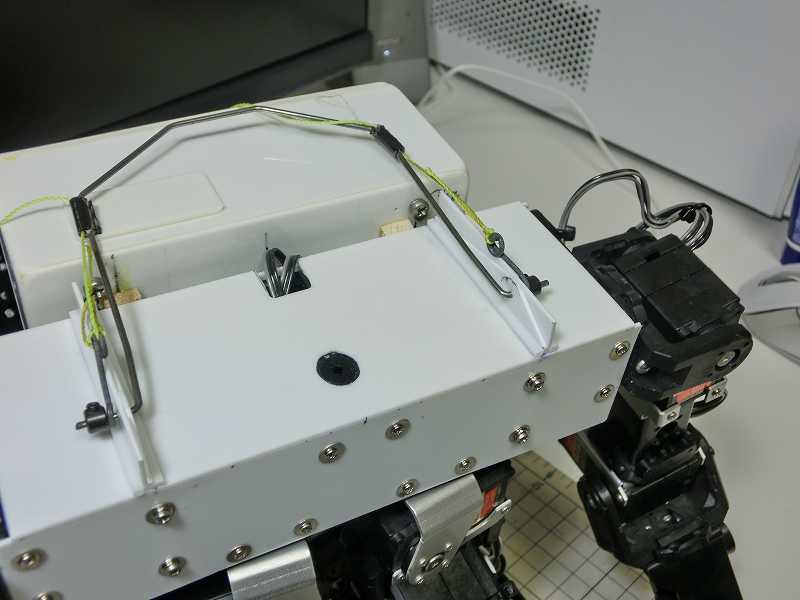
取っ手とアイプレート
19.02.03
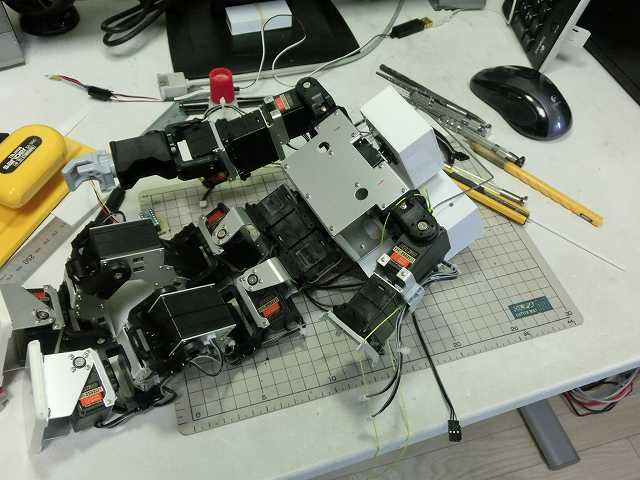
フレームの構成変更
以前の構成というか、オプションのサーボを取り付けた状態のKHR-3HVでは、股関節のロール軸が
特に全備重量に対してパワー不足でした。それが狙った位置に足をおろし、計算通りの歩行モーションを再生する妨げ
になっていると感じていたので、久しぶりに動かすにあたって、構成を変更し、股関節ロール軸の負荷を下げて
、歩行の安定性が改善されるか見ようと思いました。
具体的には腰のヨー、首、腕のヨーの合計4個のRCサーボ(約160g)を外して軽くすると共に、肩の位置を
下げて重心を下げる事により股関節への負荷を下げてみる事としました。
その他には、自作の小さめの足パーツでは、温度変化に起因すると思われる、RCサーボのドリフトによる足先の位置
変化を直すための調整をマメに行わねばならず面倒だと感じていたので、キット付属の足パーツを使ってみる事としました。

胴体と腕をつなぐパーツの仮組
19.01.27
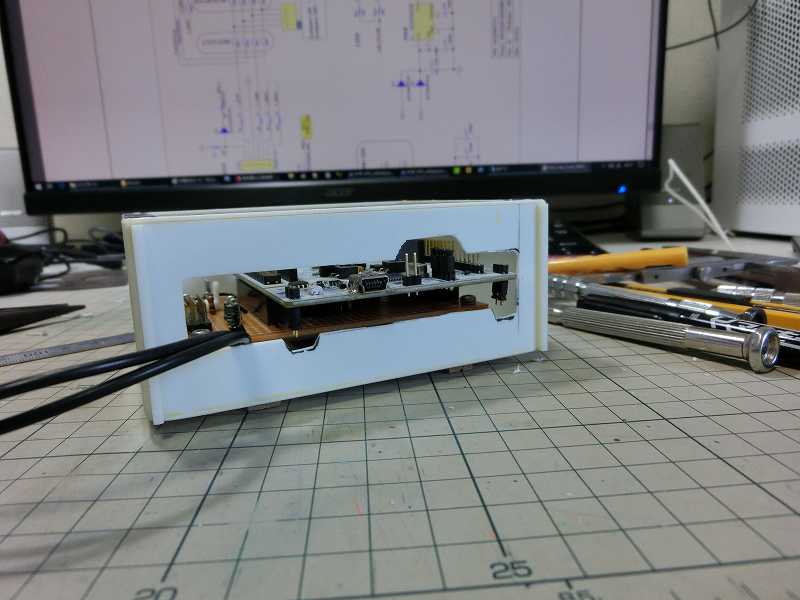
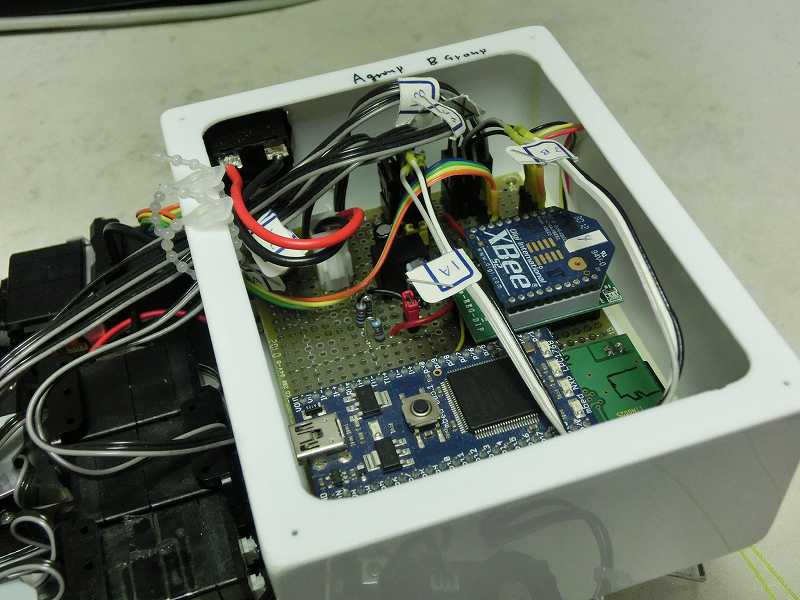
Nucleo-F401RE用I/Oボードを収めるバックパック
19.01.20
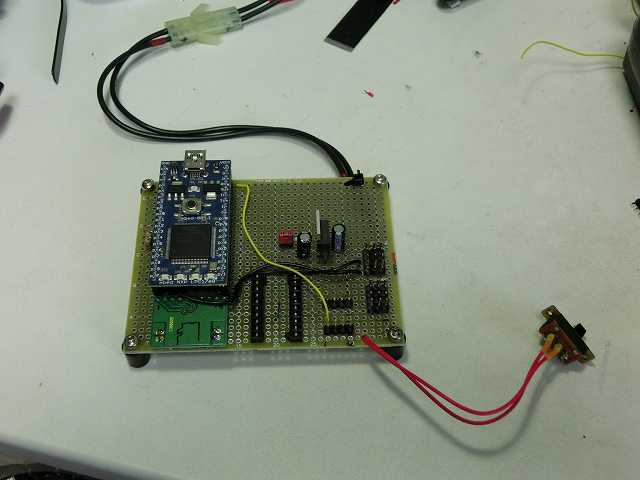
Nucleo-F401RE用I/Oボードの製作
元のLPC1768用I/Oボードの回路をベースとして、結局使わなかったminro SDカード、Xbeeと、とりあえず必要のない
スイッチボードを除いた形で作りました。
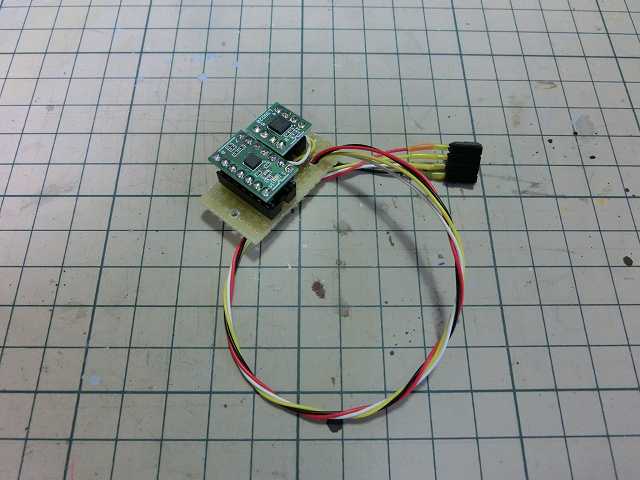
モーションセンサーは9軸のLSM9DS1に変更し、加速度と角速度のICを個別に搭載していたものを1つのICにまとめ
ました。
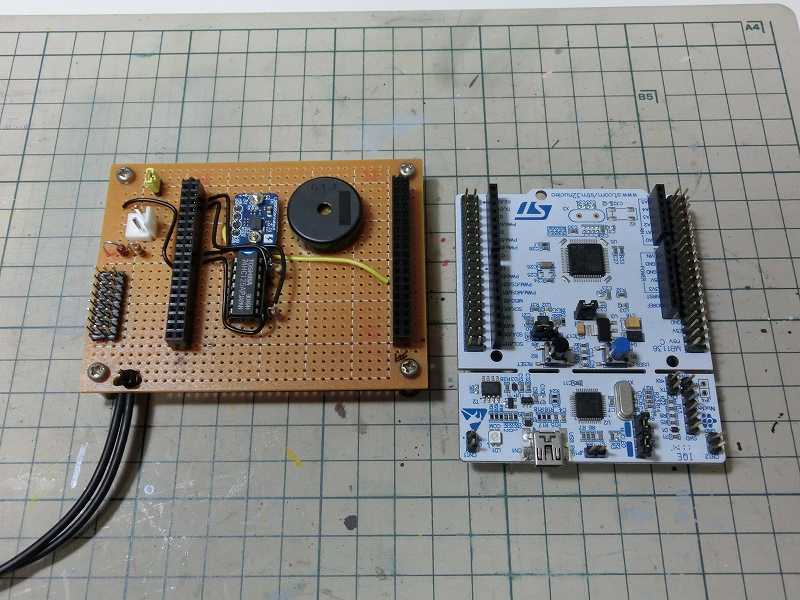
マイコンボードとI/Oボード
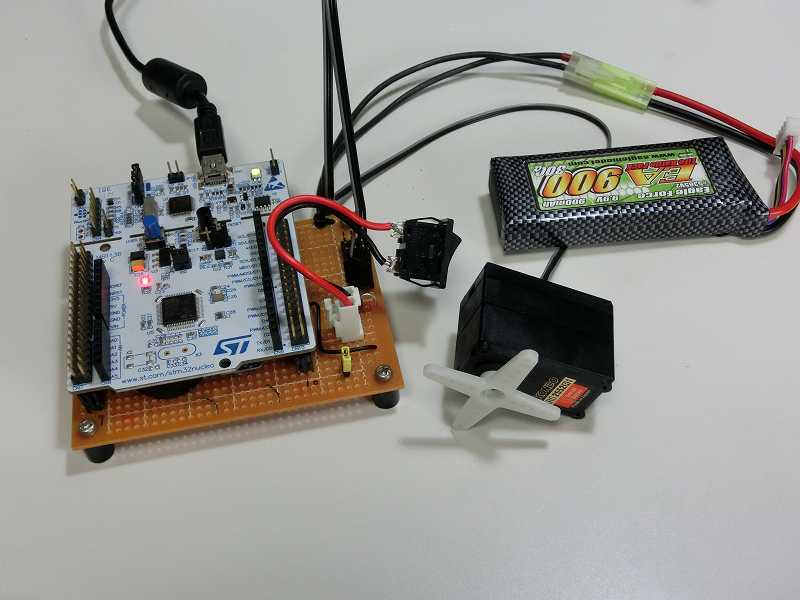
KRS2552RHVの動作確認
制御ソフトについては、モーションセンサーのI/Oルーチンは例によってmbedに公開されているものを取込、KRS2552RHV
とのI/OルーチンはLPC1768用に使っていたソースコードを取り込んで動作確認まで行いました。
写真に写っているバッテリーは内臓電池として搭載予定の9.9V 900mAhのLifeタイプです。
19.01.14
マイコン換装の検討
while(1) {
timer.reset();
timer.start();
for( float x=0.0f; x<10.0f; x+=0.001f){
volatile float y = sin(x);
//volatile float y = arm_sin_f32(x);
}
stop_watch = timer.read_us();
printf("Elapsed time is %5d minro seconds.¥n", stop_watch);
led = !led;
wait_ms(1000);
}
LPC1768のsinの場合の約104.3msecをベースとして、Nucleo-F401REでFPUを使ったsinで約11.8msec、
DSPを使ったarm_sin_f32で約6.6msecと、15倍以上の処理速度が出ていました。
2自由度の脚とLPC1768の組み合わせのPen4でリアルタイムの逆運動学計算をしながらの歩行ができたので、これならば
6自由度の脚の2L5もNucleo-F401REならできるかも・・・と言う事で、マイコン換装の方向で検討を進めることとしました。
15.10.12
PC−マイコン間通信がうまくいかなくなった件の調査
前回、PCのOSのバージョンアップに伴って、PCとマイコンの通信がうまく行かなくなった件について、
シルバーウィークの休みを利用し、落ち着いて調べてみました。
mbed LPC1768の中の、具体的にどこにシリアル通信の信号を拾える場所があるのかを調べるのが
面倒だったので、オシロで実際に信号を見てみる事はせず、
PCからマイコンにデータを送った後、一定のバイト数毎に1バイトのデータを返させる
というのの、「一定」の部分を変えながら様子を見ました。
「OSのバージョンが上がると処理が遅くなるもの」という先入観を持って調べていましたが、よく見ると、
意外にも処理が早くなったせいだという、何と言う事はない結果でした。
訳が分かったので、ソフトで簡易的にフロー制御を行い、1768側でバッファーオーバーランエラーが
起きないように調整し、また元通り動けるようになりました。
15.08.16
制御用PCのOSバージョンアップ
Windows8.1からWindows10に変えたので簡単に動作確認しました。まだ理由を突き詰めて調べていませんが、
USB−シリアルドライバ経由の通信に関してオーバーヘッドタイムが増えたようで、そのままではPCと
背中のmbed LPC1768との通信ができなくなっていました。このPCに変えて2度目ですが、ウェイトというか、
ハンドシェイクのポイントを増やし、結果的に通信速度を落とす形でソフトの調整をしました。
PCを更新してハードの性能は倍以上になっていると期待しているところでこれなので「なんでやねん」という
感じで釈然としませんでした。
歩行モーションを詰めてゆく方は、ひとまずKHR3HVのハードの性能としては「まあこんな所かな・・・」というところまで
出来た気がしているので、通信の問題調査と対策は、そのうち、気が向いたら着手と言う事にしておきました。
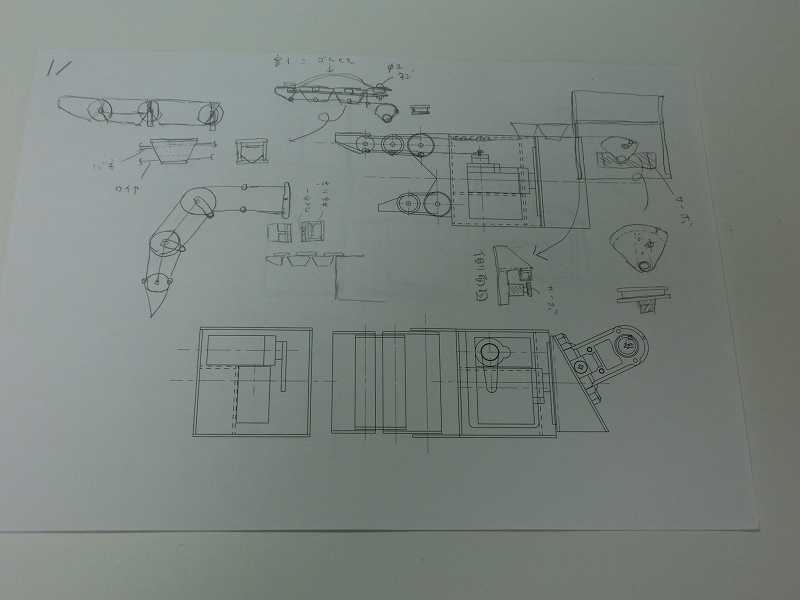
手の製作
6月頃に描いた図面から、プラ板の部品図を起こし、組み立て順序を示す図まで描いてから作り始めました。


15.06.07
今年のゴールデンウイークは旅行と、いつもロボット製作に使っている机を買い替えて、周辺の模様替えなどを
行っていたので、しばらく間が空きました。(去年の連休はこのロボットを組み立てていましたね。)
つま先とかかとを使う足先軌跡
3月から4月の書き込みで気にかけていた、足の接地時の衝撃低減のため、足を地面から離すときは、つま先を残してかかとから離し、
接地の時はかかとからするように、歩行モーションを変更しました。その途中、モーション生成プログラムのデバグ中の確認に
利用しているエクセルの操作が面倒に感じたので、足先軌跡を表示するプログラムをVB2013で作りました。ちなみにVB2013で作るのは
これが初めてでした。
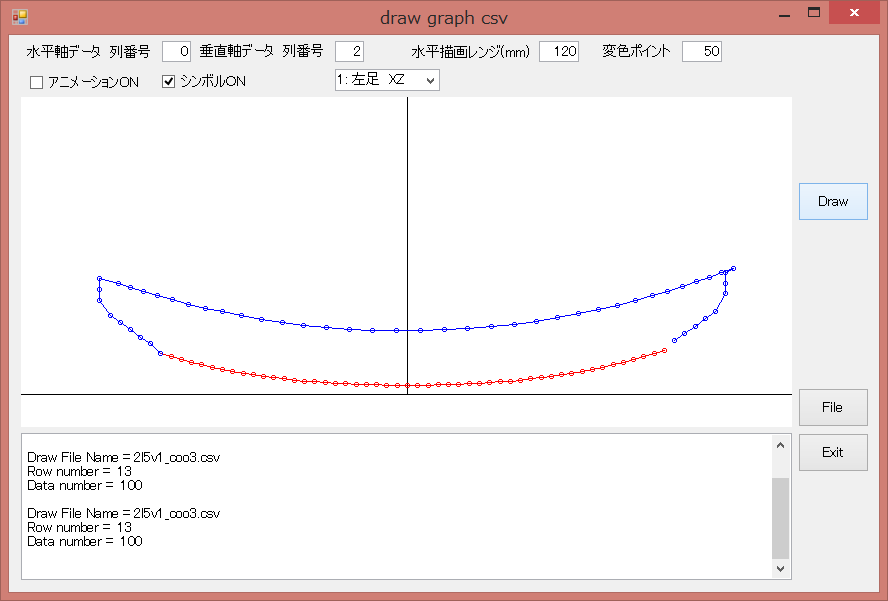
足先軌跡表示プログラム
以前の動画を見比べた感じでは、効果があったようです。
もっと良くするためにということで、遊脚相で(グラフの青い部分)足首のピッチ軸とロール軸について、KONDOサーボの設定項目の
ひとつである「ストレッチ」パラメータを小さくして、位置保持力を下げてみました。(設定値 60 --> 8)
すると、不安定で歩けなくなってしまいました。赤い部分の始めと終わりでは、足首に力が入っていないといけない様でした。
見ていると横に転倒していたので、ピッチ軸のみ保持力を下げてみたところ、不安定な感じはしますが、数歩で転倒する事はなく、
足音が少し静かになりました。うまくやれば効果はあるようでした。
逆に保持力を上げてみたところ、歩行の安定が良くなりました。結局のところ、サーボのパワー不足で、計算で狙った通りに動いていない
ということだろうと思いました。
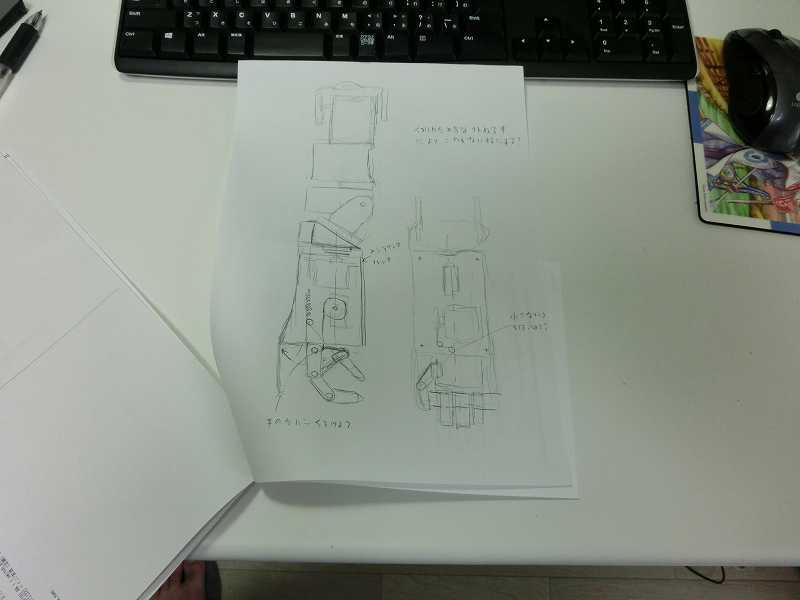
手の制作−指の試作
パシフィック・リムのロボットを見て、
握ったり、開いたりできる手と、手首を回す関節を追加するだけで、だいぶ動きの表情的なものが豊かになりそうでいいかも・・・と思い、
大体の構想をまとめた後に、ちゃんと思った通りに動くかどうか見るため、指を1本試作して動かしてみました。


手書きの大体原寸スケッチと、CADで描いた図面です。
指の関節は、普通に軸受と滑車を内蔵したタイプと、板バネを使ったタイプを考えています。始めは板バネの方を試作してみました。
とりあえず、これでも良いかな〜と思いました。
15.04.05
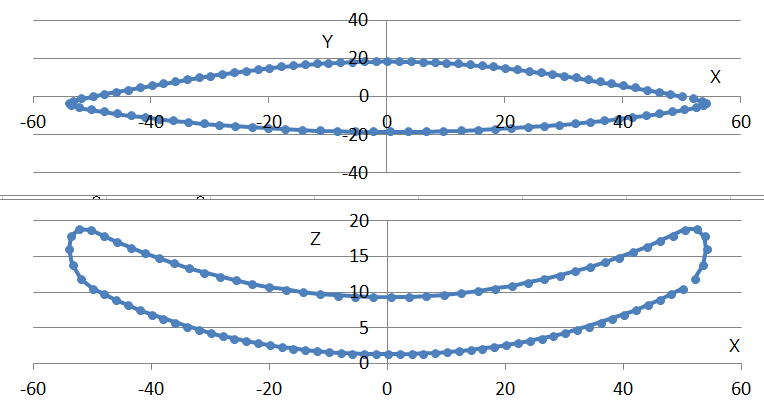
接地脚の膝角度一定歩行モーションの足先軌跡
下図は足の裏、土踏まずのあたりに設定している基準点がどう動くかプロットしたものです。
上はロボットを上から見たグラフ、下は横から見たグラフです。ずーっと使ってきた歩行モーションは
下のグラフがただの長円でしたが、このモーションは膝角度が一定なので、曲がった長円になっています。
グラフ上の点は1/100秒毎の基準点の位置で、この点の位置で逆運動学計算を行っています。
その他、今週末は歩幅をいろいろ変えて歩かせて様子を見たり、歩行モーション生成プログラムのソースコード
の一部をサブルーチン化したり、変数の使い方を統一したり、試行錯誤途中の意味のないコードを消したり等々、見やすく清書しました。
14.10.12の書き込みの時点では、一歩で加速できたのは歩幅60mm程度まででしたが、今回は100mmでも平気でした。
自重による膝関節の目標角度からの偏差が減り、足先の位置制御の精度がよくなったせいかなーと思いました。
15.03.29
接地脚の膝角度一定歩行モーションの調整
各関節の中立位置他の調整がずれてきた様なので、関節パラメータファイル利用のキャリブレーションと
歩行モーション生成ルーチンの変数の使い方の統一や、足の位置がそろっている時にも膝角度を一定とする
ルールを適用する変更を行った後、床(クッションフロア シート張)を歩かせて様子を見てみました。
一歩で加速するには歩幅が大きすぎた様で、歩き出しが不安定です。以前の腰の高さ一定 のモーションと
比べると、接地のショックが大きいためか、頭のブレも大きくなっていますが、膝を深く曲げないので、
膝の負担は、接地のショックを別とすれば、減少傾向の様でした。ショック低減の方向で改良しようかと思いました。
横から120fpsで撮影したスローモーションのムービーです。
後ろから30fpsで撮影した通常スピードのムービーです。
15.03.08
歩行モーション生成ルール変更 その1・・・つま先を使う
これまで、足の面を地面と平行に保つルールとしていましたが、2L1/2L2と比べてKHR3HVの
関節可動範囲が広い事を有効に活用し、より歩幅を大きくとる方向の制作の一つとして、足を地面から離すときは
踵から上げるようにしてみました。
歩行モーション生成の計算上、両足が接地するのは、支持脚変更の1ポイントだったところを、7ポイントとし、
足を上げるタイミングを0.07秒遅らせて、つま先の接地状態を残してみました。
下がそのムービーです。足を地面に下ろすときも踵からになっていますが、これは意図したものではなく、
膝が自重で制御目標の角度よりも深く曲がり、体全体が後ろへ傾いているためです。
120fps(1/4倍速のスローモーション)
以前の歩行モーションでも十分関節可動範囲に収まる、歩幅=50mmで歩かせています。
股のヨー軸と膝が自重で制御の目標よりも深く曲がるため、足が地面から離れるタイミングは遅めに、
足が地面に着くタイミングは早めになる傾向のもと、両足接地状態の時間を長くしたので直進性が低下しました。
見た目だけでメリットが感じられない結果ですが、しばらくいろいろ試してみようと思っています。
歩行モーション生成ルール変更 その2・・・接地脚の膝角度を一定とする
上記と別の歩行モーション生成ルールとして「歩行中は地面から腰までの高さを一定に保つ」という、計算を簡単にする
ためのルールを取り入れていましたが、これを膝サーボの負荷を減らすために変えて、「膝をほぼ伸ばした状態に固定する」というルール
の歩行モーションを作ってみました。下がそのムービーです。
遊脚側の足が地面から離れる距離が、制御目標に近づいたので、膝サーボの負荷を減らす目的は達したようです。
ただ、歩く音が大きくなり、体全体への衝撃が大きくなったみたいで「ロボット全体に負荷が大きくなった?」様な感じでした。
接地の衝撃を吸収するという観点で、踵から接地するか、足の裏に何か張るか等してショックを減らすことを考えた方が良さそうです。
120fps(1/4倍速のスローモーション)
歩幅100mm、通常スピードで撮影したムービーです。机の上でテストするのは手狭な感じです。
15.01.18
PC<--->マイコン間の通信プロトコル変更
新しいPCでは、簡単にロボットと通信できるかの確認だけ済ませた状態だったので、今週初めて
PCからの制御で歩かせてみました。すると、コマンドやデータがうまくロボットのマイコンに
伝わらず歩けませんでした。
正常に働くコマンドと働かないコマンドの差、ボーレートを半分に落としてみる、22軸分の角度データを
一気に送っているところの途中にSleep(1)関数をいくつか入れてみる・・・などなどで色々調べてみました。
その結果、PCが速くなったので、同じボーレートでも、送信データの1バイトと1バイトの間隔が短くなり、データの
取りこぼしが起きていると結論しました。
921600bpsで、だいたい22バイト連続して送ると調歩同期の同期がずれることが分かったので、10バイトに
一回、マイコンから1バイト、ACK替わりのデータを返させ、PC側はそのデータを読んでから
先に進む様にしたところ、また歩けるようになりました。
調整スタンドの試用
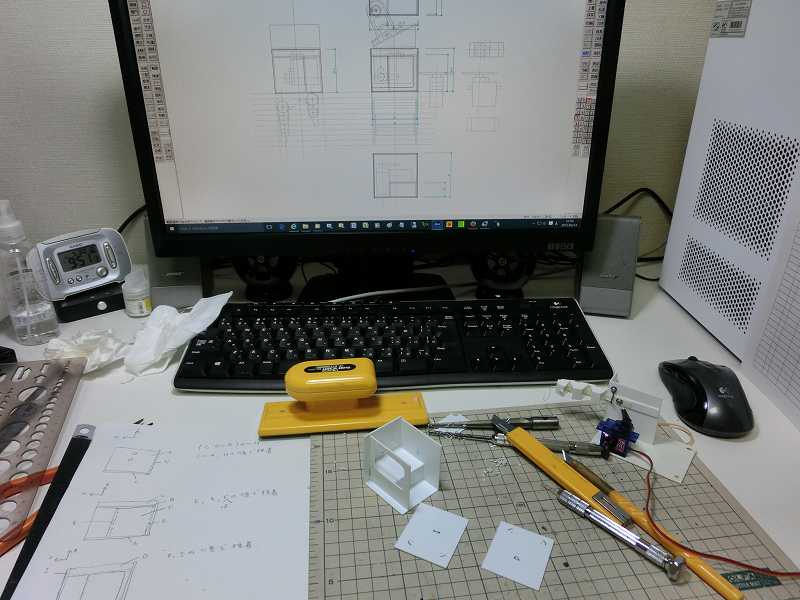
15.01.12
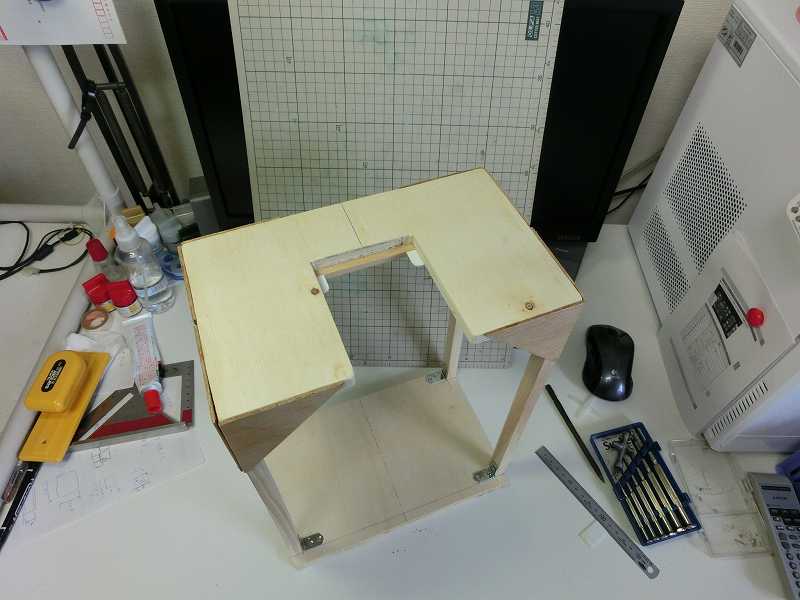
調整スタンドの制作
調整作業を簡単にする方向の道具として、調整用のスタンドを作りました。いろいろ図面を描きながら
考えていたのですが、どういう形が使いやすくて、安い材料費で簡単に作れるか・・・というイメージが
まとまらなかったので、木で簡単に作って、使ってみながら考えることにしました。

調整スタンド全体
12mm厚のベニア板をヒノキの棒で支えています。切り欠きの部分にKHR3HVの胴体をセットします。

KHR3HVセット状態
行うのは脚関節の調整だけなので、腕は脱力して上に向けてセットします。

スタンド裏面
腰の部分のサーボを軽く挟み込むようにして、定位置を保つようにしました。
多少反っているような板と棒で作ったので精度は良くないですが、吊った状態で適当に定規を
あてて調整したいたので、台の床面から三角定規を立てて位置合わせや、足先移動量の計測を
すれば、まえよりだいぶマシな、再現性を含めた測定が簡単になるのでは、と期待してます。

ジグソー(電動工具)
最近、ノコギリを使った簡単な工作でも腕や腰が痛くなることが多いので、楽に作れるように
ジグソーを買い、使ってみました。DIY用ではまんなか辺の価格帯の機種を選びました。
楽に切れるので、もっといろいろ作ってみようかという気持ちが湧きました。
14.12.14
関節パラメータファイル 調整機能
歩行モーションの基本は触っていないのに、よく転ぶようになったな〜と思ってよく見ると、サーボの中立位置や
PCから入力される各関節の角度と実際に動く角度がずれてきていました。歩行モーションの中立位置や振幅をずらす
ことでしばらく対応していましたが、直線性の誤差が±2%程度あるポテンショメータ方式のロータリーセンサ
で位置検出をしているRCサーボの仕組み上、頻繁に調整が狂うのは避けられないとあきらめているので、2L1の
頃から付けていた、関節パラメータファイル 調整機能を実装しました。
2L1/2L2ではC++で作ったコンソールアプリの方にこの機能を付けていましたが、今回は操作性を
重視して、VBで作ったプログラムの方に付けました。
画面イメージ
この例では、イメージの下の方に並んでいる数字で、ID11のサーボの-90, 0, +90度に相当する
RCサーボに与える数字を調整しています。
面倒で楽しくない作業なので、効率的かつ、なるべく自動でできる方向で検討を進めようと思っています。
14.10.19
足の裏の材質変更
プラ板そのままの様な、滑りやすい足の裏にしておくと、例えば重心移動のタイミングがおかしかったり等で、足が地面に付く
場所やタイミングが狂っても、足が滑ることにより転倒しにくくなります。ここまでで、そういった制御の甘い部分が改善されてきた
と感じたので、足の裏にゴムシートを張り付け、滑りにくくしました。

足の裏に貼りつけた、0.3mm厚のクロロプレンゴムのシートです。1994年ころ、R魚の尾びれ用に、いろいろな厚さと種類のゴムシートを
買ったものが残っていたので使いました。現状のプラ板製の足の縁のRにきれいににフィットするよう、手持ちの中でも薄いものを選びました。


貼りつけ前後の写真です。後で違う材料も試せるよう、撤去が比較的容易なゴム用の両面テープで貼りつけました。
歩行モーションの改善
足の裏にゴムシートを張り付け、滑りにくくしたところ、初めの一歩でほぼ必ず後ろへ転倒するようになりました。以前の物も含めて、高速度撮影した
ムービーを何度も見て確認したところ、一歩目で右足を前に出し、下ろすときに、左足をかするようになっていました。以前はプラ板同士でよく滑るため
そのまま先に進めましたが、こんどはそこで引っかかって転倒していることが分かりました。
動画のリンク1(改善前 120fps)
歩きだして定常状態になれば自分の足を踏まなくなっていることもムービーで分かったので、その点に着目して見たところ、一歩目は
股関節のロール軸の負荷が、定常状態と比べて大きい事に気付きました。
言いかえれば結局のところ、股関節のロール軸サーボのパワー不足が原因なので、最初の一歩で足を上げるタイミングを定常状態と同じにして、負荷を下げたら解決しました。
動画のリンク2(改善後 120fps)
動画のリンク3(改善後 通常速度 30fps)
14.10.12
歩行モーションデータ生成機能のコーディング(歩行中の歩幅変更機能)
前回更新時は「初めの一歩(定常歩行の速度まで加速)、定常歩行、最後の一歩(停止)」の3つのモーションにて
歩幅40mm/周期1秒で歩いていました。ある程度以上の歩幅(速度)になると「初めの一歩」では加速しきれず倒れてしまうので、2歩以上で
定常歩行の速度まで加速出来る様、モーションが始まる時と終わる時の歩幅を変えられる歩行モーションデータ生成の関数を
作りました。ちなみに、Pen4号は足の可動範囲が狭く身長が低いわりに足が大きいので必要ありませんでした。
動画のリンク1(通常速度−30fpsで撮影)
動画のリンク2(120fpsで高速度撮影)
安定がいまいちでしたが足の大きさ70mmに対し、歩幅80mm(周期は前回と同じ1秒)までいけました。そろそろ足の可動範囲の境界にかかるので
足の辺(踵とつま先)も使い、もう少し長い歩幅で歩けるようにしてゆこうと思います。
14.10.01
歩行モーションデータ生成機能のコーディング(Pen4ベース版)
14.09.07
歩行モーションデータ生成機能のコーディング
前回の更新の時に触れたとおり、2L1のプログラムの中で「この辺が最終版に近いだろう・・・」と適当に
選んだプログラムの中から直進歩行のモーションを生成する関数を1つ移植し、2L1と重心の高さが違うので
簡単に周期、左右方向の重心移動量などのパラメーターを調整して歩かせてみました。
動画のリンク
動画はよく観察できるよう240fpsで撮影しました。ジャイロのフィードバックは無です。
KHR3HVと比べると、剛性と各関節のトルクが低い2L1用に調整したモーションで、このロボットに
適したモーションで無かったです。がっかりでした。
それはさておき、移植の作業をしながら約10年前に2L1でどういうことを試したのか、色々なバージョンの
ソースコードに目を通しながら思い出しつつ、新しく作るプログラムの構想を練りました。
今日時点でだいたい考えがまとまったので「膝の屈伸」と、直進の「初めの一歩」のプログラムから
コーディングを始めました。今までのプログラムに目を通した結果、結局「いろいろ試してうまくいったことを
きれいに清書してある」形のPen4のコードをベースにしました。
少し腰を落として、常に足裏全面を接地して歩く、いままでおなじみのモーションを作ったのち、接地脚の膝は
伸ばし、遊脚相の初めと終わりにつま先と踵を使うモーションへ進もうと思います。
14.08.18
バッテリーのパック
スイッチ交換
14.08.12
歩行モーション生成 関数の移植
逆運動学計算の関数の検算を終えたので、計算のベースにしている図でプログラムと整合性を取る必要があった部分をCADで描いた図に
反映しました。骨格の模式図と関節可動範囲の図です。関節の可動範囲については、正確にはもう少し大きいですが、私のプログラムで
使う範囲ということでまとめました。
その後、左右の足に同じX,Y,Z方向に動かす入力を与え、ズレ(動かすにつれて、つま先が近付くとか離れるとか)を見ながら関節
パラメータファイルの数値を調節しました。
ここもスムーズに歩くために重要なポイントなので、後日関節パラメータファイルを編集する機能を作ったのちもっと、座標の絶対値で
調整する予定です。
ここまでで、ひとまず足先を座標入力で動かせるようになったので、足先の軌道を生成する(言いかえると歩行モーションを生成する)
関数(create_waveset)を移植しました。移植作業としては、coo2servoまでで、引数を少し整理したので、それらを反映しましたが、
だいたいそのまま2L1のプログラムから持ってきただけでした。
動作確認
14.08.03
逆運動学計算 関数作成(というか、移植)
関節パラメータファイルが出来たので、各関節の角度を入力すると、サーボ出力値を出力する関数(angle2servo)を移植しました。
次に、足先の座標を入力すると、各関節の角度を計算した後、angle2servoを利用してサーボ出力値を出力する関数(coo2servo)を移植しました。
2L2の同名の関数を移植しましたが、4節リンクが無く、2L2に比べて、軸のオフセットがある個所が少ないので、大分シンプルになりました。
関節パラメータファイル、ファイル作成前に描いた図、移植した関数の間で記載内容の整合性を取りながら、coo2servo関数をテストというか検算中です。
だいたい良さそうなので、次は歩行のモーションを生成する(実際はcoo2servoに与える足先の軌道を離散化した点列を生成する)クラスを移植する予定です。
そこまで行くと、とりあえず2L1の様な感じで歩けるようになります。その後はボディーの性能を生かして、より大きな歩幅で、早くスムーズに歩けるようにする
方向で作っていこうと考えています。
14.07.13
動作の制御ソフト(2l5v1_vc)
14.06.15の書き込みでデータ更新周期を見た結果を受けて、2L1の初めの頃のように、PCで動くソフトから
直にロボットを制御してみる方向で、動作の制御ソフト(2l5v1_vc)をVC++2010を利用して作り始めました。
うまくまとまったら、ロボットにBeagleBoneBlackの様な、UNIX系OSが動くボードを載せて、それに移植して動かそうと
思っているので、CLRは使わず、比較的移植しやすい(と思っている)Win32のプロジェクトにしました。
実は、Visual C++ のWin32でシリアル通信機能そのものに関するプログラムを書くのは初めてだったので時間がかかりました。
プログラミングにあたっては、以下のサイトを参考にさせていただきました。
Windows デベロッパーセンター [VC++ Native] 仮想 COM ポート アクセス
http://code.msdn.microsoft.com/windowsdesktop/COM-howto-4b79a479
YS電子工作ラボ RS232C シリアル通信
http://www.ys-labo.com/BCB/2007/070512%20RS232C%20zenpan.html
2l5v1_vcから関節を動かすことが出来たので、以前のロボット用のソースコードから、幾何計算や設定ファイルのIOルーチンなど、流用できる
コードを探し集めながらコーディングを進めています。
関節パラメータファイル(つづき)
意外と手間取った気がしますが、いちおう出来ました。逆運動学ルーチンを書いていて、計算の簡素化のために
変えた方が良いと思ったら、またフォーマットや内容を変えるかもしれません。
今日のところはこんな感じです。
各関節の可動範囲を調べつつ、KHR3HVを4足歩行させるとしたら、どんな姿勢が良いかな〜と考えていました。
仰向けで4足歩行させるのが、関節の可動範囲的に良さそうです。そのうち4足歩行のモーションも作ってみようかと思いました。
14.06.29
関節パラメータファイル(つづき)
骨格や関節の可動範囲、正負の方向などを描いた図をJW−CADで清書しつつ、関節パラメータファイル作成を続けました。
今日時点でだいたいできました。
こういう情報や図は、歩行モーションを計算する時などに必ずいるので、キットのCDに入っていたら嬉しかったかも・・・と思いました。
この図を描いていて気がつきましたが、腰、股関節、肘が軸同士が直交せずオフセットがありました。これが無ければ計算ステップが
その分減り、プログラムがシンプルになって良かったのに・・・と思い、少し残念でした。
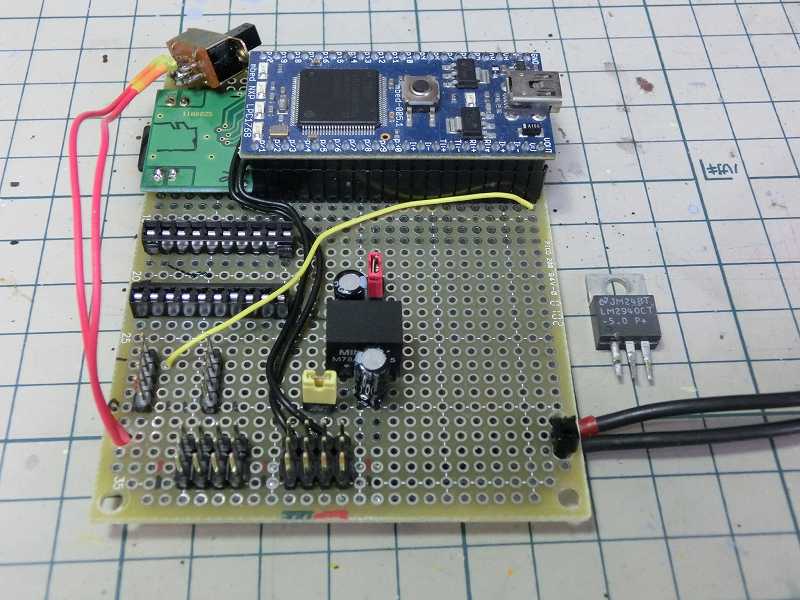
3端子レギュレータ換装
制御基板に供給する電圧が、いままで作ったロボットよりも高くなったため、いつも使っている3端子レギュレータ(LM2940CT-5.0)の発熱が
思っていたより大きく、予定していなかったヒートシンクが必要になり邪魔でした。そこで、7805系統の3端子レギュレータの置き換え用に
売られているDC−DCコンバータ(R-78E5.0-0.5)に換装しました。ヒートシンクが外せて基板がすっきりしました。

14.06.15
関節パラメータファイル
とりあえずは、2L1の歩行モーションを作るプログラムをベースに作ったプログラムで歩かせてみる方向で関節パラメータファイル
の準備を始めました。
各軸の中立位置として出力する数値や、数値の増減でどちらへ動くか、45度動かすのに出力値をどれだけ増減すればよいかなどを
、Pen4号他でいつも作る、各関節を個別に数値を指定して動かすVisual Basicで開発したプログラムで調べて、これまた何時もの
関節と骨格を模式化した図に記録しました。
ユーティリティープログラム(2l5v1_vb)の画面
KHR3HVはサーボモーターのケースやフレームに印がついていて、なかなか調整が楽に出来ました。
データ更新周期を見るテスト
現在のPC→LPC1768→KRS2552RHVの構成で、どのくらいの周期で22個のサーボの位置を更新できるのか、PC→LPC1768間の
ボーレートやLPC1768側のwaitを変えつつ試してみました。(LPC1768→KRS2552RHV間は1.25Mbpsです)
PC→LPC1768間のボーレートを921600bpsにセットして、だいたい1秒間に180回程度更新できました。体を
支える事が出来るのか見るため、簡単な膝の屈伸を行うモーションを作り動かしてみました。
見た感じでは特に問題無く、PCからの制御でも歩けそうな感じだったので、モーションセンサの情報などをフィードバックする
通信の時間なども見込んで、1秒に100更新周期でこの先しばらく動かしてみようと思いました。
かなり余裕を見た設定ですが、Pen4号までは50回だったことを考えると、2倍の周期からのスタートなので、悪くなかろう
と思いました。

テスト中のスナップ
14.05.25
電池パックの組み直し
シリアルサーボ取り扱いの練習
オシロスコープで見ながら、サーボから来る内容が読み取れない原因を調べました。
見てみると、送信時もデータの間隔が短いせいか、サーボ側で取りこぼしが起きているよう
だったので、数マイクロ秒ほどwaitを入れました。

また、信号の衝突を避ける意図で入れたトライステートバッファ(74HC125)の切替タイミングが
早すぎで、受信完了前に方向を切り替えてしまっていたせいで情報を受け取れていないことが
分かったので、これもwaitで調整しました。
以上で受信もうまくできるようになりました。
数年前の引っ越しの時に、古いアナログオシロスコープが使用頻度も低く邪魔だったので捨てて
しまい、次に使う用事が出来たときに新しいのを買おう!と思っていたので、今回、新しいのを
買いました。TextronixのTBS1052Bという機種です。以前、同程度の性能?のTDS210というオシロ借りて
使っていましたが、それと比べて随分安くなったな〜と思いました。まだ使い始めたばかりですが、
とくに違和感なく使えています。
14.05.11
命名
KHR3HVと、違いが結構大きいというか、より大きな違いが出てくるので、ネットでも良く見かけるキット通りのKHR3HVと
区別するため、自作ロボットのいつものネーミングルールに沿ってこれから「2L5v1」と呼ぶことにしました。
マイコンボード
「何はともあれ、なるべく早く動かしてみよう」ということで、現時点でPen4号に載せているマイコンボードを
シリアルサーボ対応にしたような物をスタート地点とすることにして作り始めました。

マイコンボード
シリアルサーボ取り扱いの練習
ソフトの作り始めでは、サーボの可動範囲を振りきってロックさせる・・・といったようなこともしばし行って
しまうので、そういった時もなるべく被害が少なくなるよう、左肘を外して、ID=4のサーボのみの形で動かしてみました。

ICS3.5のマニュアルや、KONDO Webサイト内の関連するページを参考に動かしてみたところ、通信速度を1.25Mbpsに
セットしてmbedLPC1768から動かすことが出来ました。ただいろいろ試すも、情報の読み取りができず調査中です。
情報を読めなくともとりあえずは困らないので、サーボをスレーブモードに、情報をサーボから返さない様にセットして
おきました。
頭とバックパックの製作
キット付属の頭とバックパックには、入れたい基板が入らないので、これまたいつもの要領で、プラ板の箱を作って付けました。
歩行時に体と脚のヨー軸も使うつもりなので、いつもは腰に設定している安定化の基準点を頭にするため、頭の中にジャイロと
加速度センサを設置しました。


形については「なんかカッコいいやつにしたい・・・」という気持ちはありますが、早く動かして遊べる状態にすることを
優先して、とりあえずタダの箱としました。このへん何を優先して妥協するかは製作者の性格が出るところなのでしょうね。
モーションセンサー基板
14.04.27
ハンガーの用意
動きの調整に必要なので、引っ越し以来分解してしまったままだったPen4用のハンガーを
出してKHR3HVを吊るしました。
出す前は「サイズ的に小さくないかな?」と思っていましたが、
2〜3歩、歩かせての調整まで大丈夫そうでした。

直流安定化電源
14.04.13
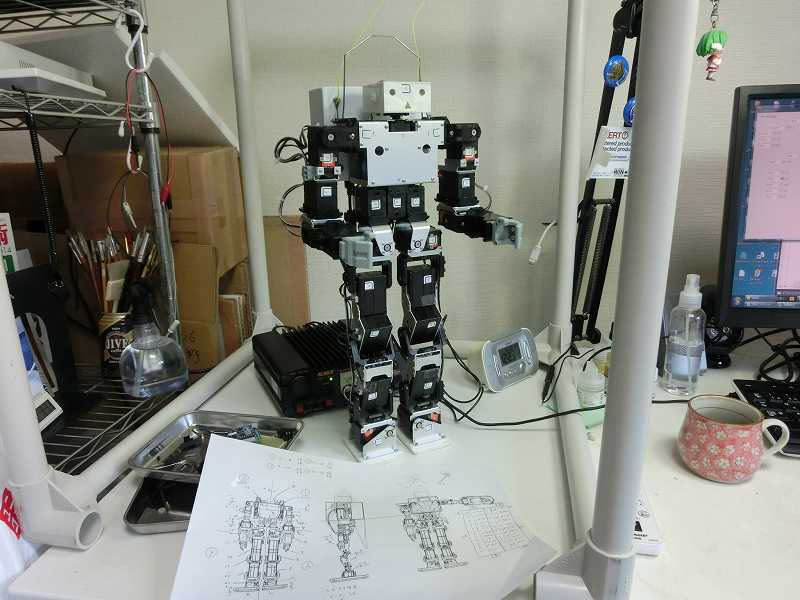
ロボットキット(KHR3HV)組立

一応組み立て終えました。、Pen4号と比べると背が高いです。
以前のKONDOのRCサーボは、電源が入っていない状態では、出力軸がとても軽く抵抗なく動いたので、
それで組んだロボットも、電源が入っていない状態では糸の切れた操り人形みたいな感じで、クタクタでした。
KHR3も電源が入っていない状態で立たせることは出来ないだろうと、なんとなく思っていたので、
こんな感じで立たせることが出来る事が意外でした。教示機能が使いやすいという観点では良いと思いました。いっぽう、
ゲインを下げたり、不感帯を広げてパッシブに動かしたいケースでは、前の方が良かったのでは?と思いました。
「足」の製作
マイコン搭載スペースの検討



2L1/2L2/Pen4等で使っている95×72mmのユニバーサル基板とBeagleBoneBlackをバックパックに
載せてみました。マイコンボードはこれから作るので、バックパックに合わせて、いつものユニバーサル基板より
小さめの基板にまとめる事もちょっと考えましたが、余裕が無いので、首が付く辺りまで使う、大きめのバックパック
を作る方向で検討を始めました。
14.03.30
ロボットキット(KHR3HV)購入
Pen4号より自由度が高いロボットを動かして遊びたい・・・とここしばらく考えていました。シリアル通信で動かせる
サーボモーターを使いたいというのは決定事項として、あとはフレームを新設計で作るかどうかといったところを考えていました。
今回は、手軽に動かすところまで行けるので、キットを買ってみました。プログラミングの自由度は高い方が良いので、専用の
マイコンボードを除いて買え、素材としても使いやすそうな「KHR3HVセレクトパック」に「拡張5軸セット」と、当然セレクトパックに
入っているだろうと思ったら別売りだったサーボの「ケーブルセット」で購入しました。

パッケージ

Pen4号のSX-101ZとKRS2552で、サーボの大きさ比較。大きさはだいたい同じ・・・だけれど、出力と消費電力が4倍くらい違います。

組み立て中のスナップ
どういうコンピュータを載せるか、まだ具体的な設計案はありませんが、Cortex-M3かM4のマイコンとBeagleBoneBlack(Cortex-A8)の
組み合わせなんかどうだろう・・・とか考えています。
戻る
ホームへ戻る



















{kind=link}