| 全高 | 400mm |
| 全長 | 115mm |
| 全幅 | 190mm |
| 本体の重量 | 約1800g |
| 合計自由度 | 22(脚:12、腕:8、腰:1、首:1) |
| モーター | KONDO KRS-2552RHV(KHR3HVキット標準) |
| 電源 |
ニッケル水素電池 (9.6V 700mAh) (通常は外部の直流安定化電源(ALINCO DM-330MV)から供給) |
| センサー |
|
| CPU |
mbed LPC1768(Cortex-M3) Windows 10 PC |
|
ひとつ前のロボット(Pen4V3)の流れで、操縦できる様ゲームパッドとXBeeをつないでいますが、 基本は、PCで走る制御プログラムで運動制御します。PC用のプログラムが形になったら、PCの部分を BeagleBoneBlack等のARM Linuxのボードと入れ替えた上で、ロボットに搭載し、自律型ロボットとしても 動かしてみようかな・・・と思っています。(2014/08/18現在)
PC用のプログラムです。_vbの方がVisual Basic 2010用で主に調整に使います。_vcの方がVisual C++ 2010用で、歩行制御に使います。
|
バックパックの中に入っている基板です。システムブロック図では「ロボット側」として囲んである範囲が相当します。
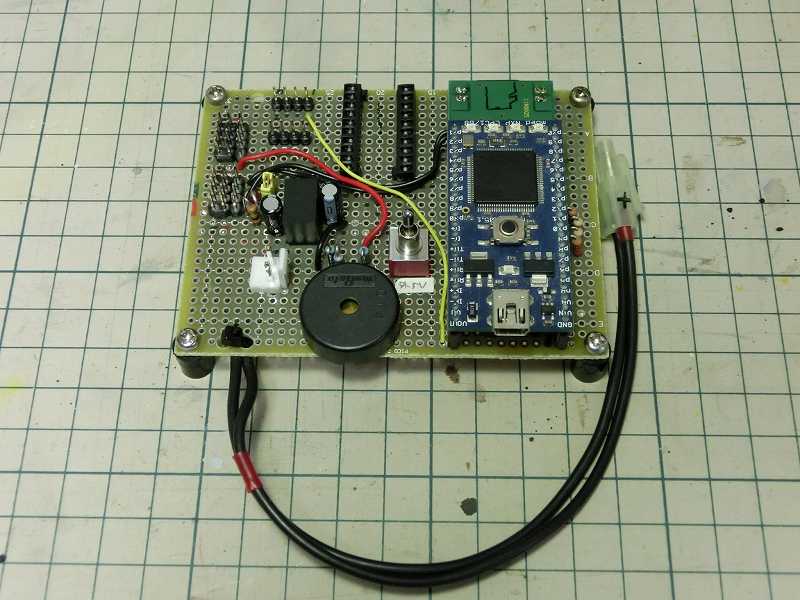
マイコンボード
I/Oボード回路図(クリックで拡大)
|
補足
|
こんな感じで動きます。
|
|
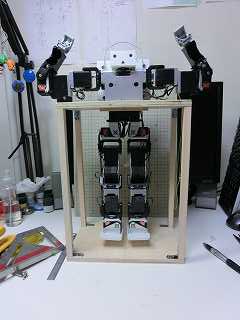
2015.06.14:横から見たところ
動作の制御はPCから、電源は外部から供給しています。 |
|
|
2015.06.14:前から見たところ |
| 品 名 | 税別参考価格 | 備 考 |
|---|---|---|
| KONDO KHR-3HV Ver.2 セレクトパック | \95,000- | ロボットキット「KHR-3HV」のマイコン無のセット |
| KONDO KHR-3HV用 拡張用サーボ5個セット | \31,000- | |
| KONDO ZH接続ケーブルセット | \5,000- | |
| ALINCO DM-33OMV | \15,000- | スイッチング電源 |
| Ni-MH 電池 1.2V 650mAh×9本 | \3,500- | タブ付、合計金額 |
| 充電器 | \2,000- | ラジコン用 |
| mbed LPC1768 | \7,000- | マイコン |
| ユニバーサル基板 | \100- | |
| ICソケット | \100- | |
| ピンヘッダ | \100- | |
| Micro SDカードスロット | \300- | |
| 2G Byte Micro SD | \400- | |
| RECOM R-78E5.0-0.5 | \350- | 5V 0.5A出力 DC-DCコンバータ |
| 圧電スピーカー | \30- | |
| スイッチ類 | \500- | 各種合計 |
| Xbee×2 | \3,400- | 無線ユニット、合計金額 |
| 受動電子部品類 | \100- | 抵抗、コンデンサなど |
| STマイクロ L3GD20 | \750- | 3軸ジャイロ(角速度)センサーモジュール |
| STマイクロ LIS3DH | \600- | 3軸加速度センサーモジュール |
| プラ板 1.0mm厚 | \400- | B4サイズ2枚入りセット |
| 調整スタンド材料 合計 | \1,000- | 合板、角材、金具 |
| 合計 | \166,630- |