|
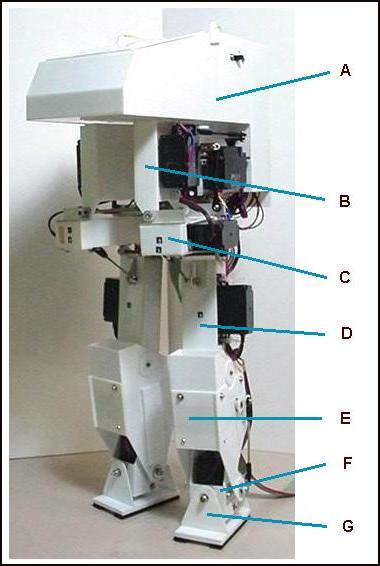
2L1v5 AからGをクリックすると図面が見られます (作りながら直したので完成状態と少し違います) A:Torso B:Hip1 C:Hip2 D:Thigh E:Shin F&G:Ankle & Foot |
本当はガタが大きくなるし、可動範囲も狭くなるのでリンクは使いたくなかったのですが、 上手くダイレクトに納める方法を思いつかなかった事と、 当初はトルク3.3kg・cmのサーボを使用していたのでダイレクトに接続するとトルク が足りなくなるため、止むを得ずリンクでつなぎました。
|
|
2L1v5 AからGをクリックすると図面が見られます (作りながら直したので完成状態と少し違います) A:Torso B:Hip1 C:Hip2 D:Thigh E:Shin F&G:Ankle & Foot |
CADデータ(JW-CAD for Windows用)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}