概要
このページでは電源について説明します。
このロボットには、制御用、動力用の2系統の電源があります。
1個のバッテリーからうまく2系統に分けたい気持ちはあったのですが、
下記のような異なる性質を要求するため、簡単にそれぞれ別バッテリー
から取る様に分離しました。
・制御系統:電圧が安定していなければならない。
・動力系統:要求出力が大きい。また、要求する出力の変動も大きい。
制御系統の電池
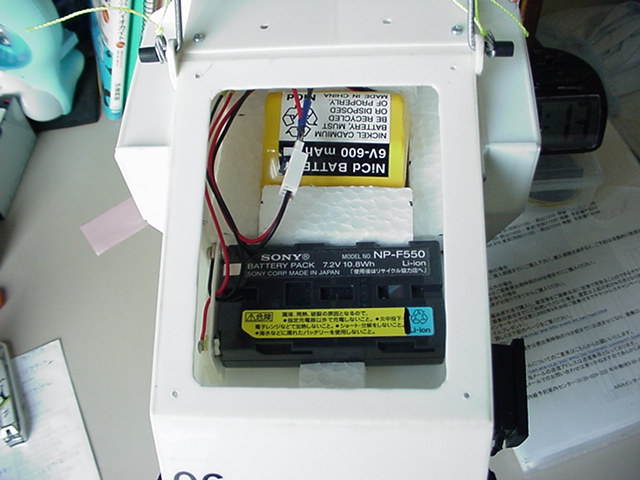
リチウムイオン電池(ソニー製 NP-F550 10.8Wh / 約1500mAh)を3端子レギュレータで、
5Vに安定化して使っています。外形、重量の割に容量が大きく、継ぎ足し充電が出来て
自己放電も少ないと言うことで使うことにしました。
電池自体に、残量情報を外部に出力する機能があるようですが、今のところ特に必要を感じない
ので利用していません。(電池が切れるとサーボへの信号が無くなり、ロボットは不意に「くたっ」
と言う感じで倒れますが・・・べつに壊れるわけではないので、あまり気にしていません。)
将来自分で充電ステーションから充電するようなロボットを作ったら、その時に読み出し方を
調べようかと思っています。
v1~v5の初めまでは、制御用の電源の接続先が、PCの側に置いてあるサーボコントローラー5
だったので、5Vのスイッチングレギュレーターを使っていましたが、サーボコントローラー7に
してから、接続先がロボット本体の背中に変わったので、内蔵しました。
動力系統の電池
サーボモーターの駆動には、安定化していない電源を用いています。
v1~v5までは、RCサーボとして主にサンワのSX-101Zを
使用していましたので、モーター保護の観点からマージンを取り
4.8V1300mAhのニッケル水素電池(1.2V1300mAh×4)を使用していました。
しかし、v6ではニッカド電池の使用を前提とした、消費電力の大きな
RCサーボを使用したため6V700mAhのニッケルカドミウム電池を使用しました。
稼働時間の目安としては、約30分ほどを考えていました。
写真
2L1v1~v5の途中までは外部給電式で、v5の後半からv6にかけては
内蔵しています。動力系統の電圧はv6のみ6Vで、それ以前はRCサーボ
保護の観点からずっと4.8Vを使用していました。
戻る
ホームへ戻る