|
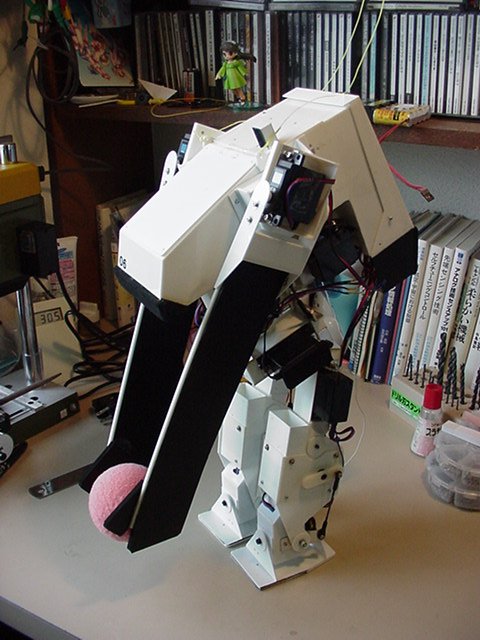
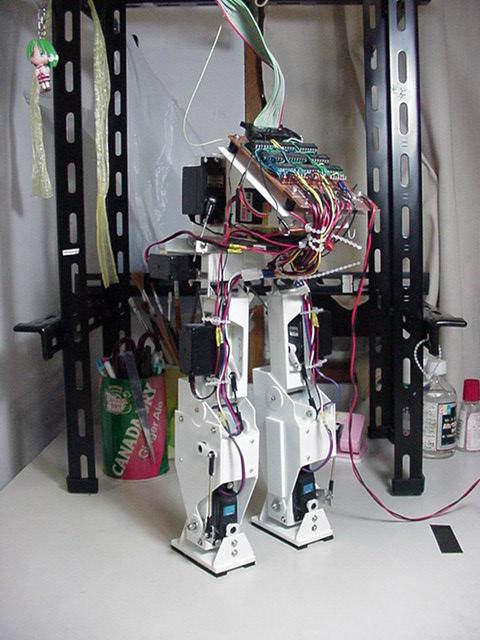
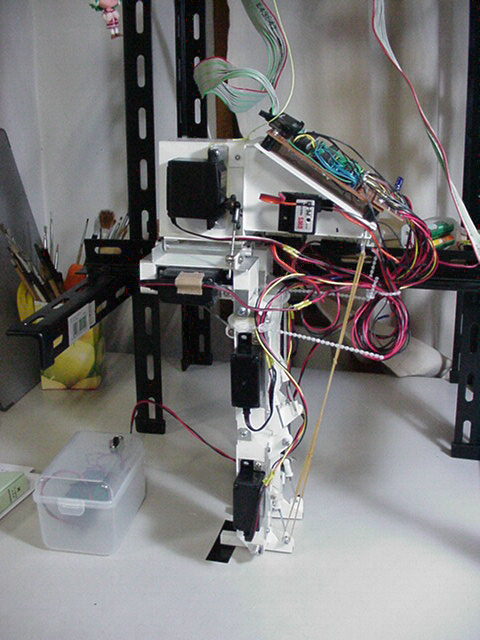
02.04.07~02.07.15(2L1v6) 半数のサーボモーターをトルクが3.3kg・cmのタイプから10kg・cm程度のタイプに交換し、 併せて、内蔵マイコンのSRAMの容量を増やし、PCからのケーブル無しで歩けるように しました。 脚との協調動作の開発用に、肩の部分に2自由度がある腕を追加しました。 これにより、合計自由度が16になりました。 |
2L1v6
|
|
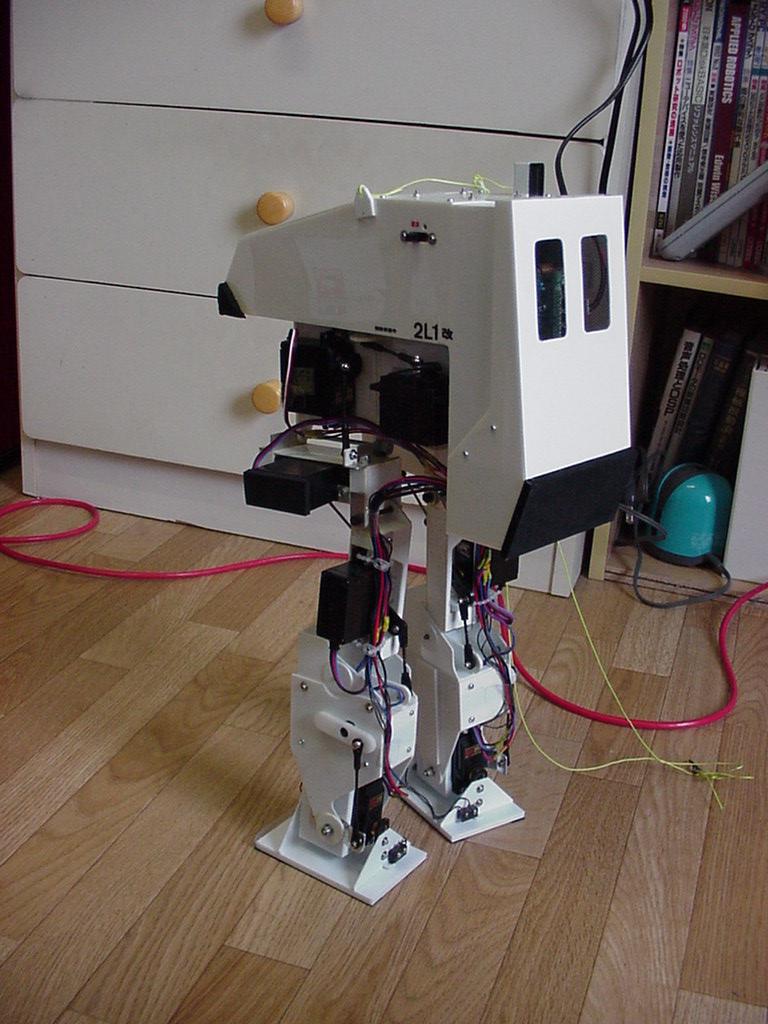
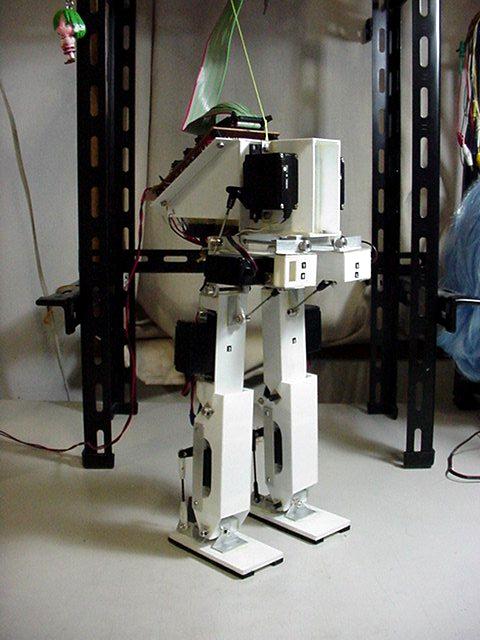
02.04.07~02.07.15(2L1v6) 半数のサーボモーターをトルクが3.3kg・cmのタイプから10kg・cm程度のタイプに交換し、 併せて、内蔵マイコンのSRAMの容量を増やし、PCからのケーブル無しで歩けるように しました。 脚との協調動作の開発用に、肩の部分に2自由度がある腕を追加しました。 これにより、合計自由度が16になりました。 |
2L1v5

|
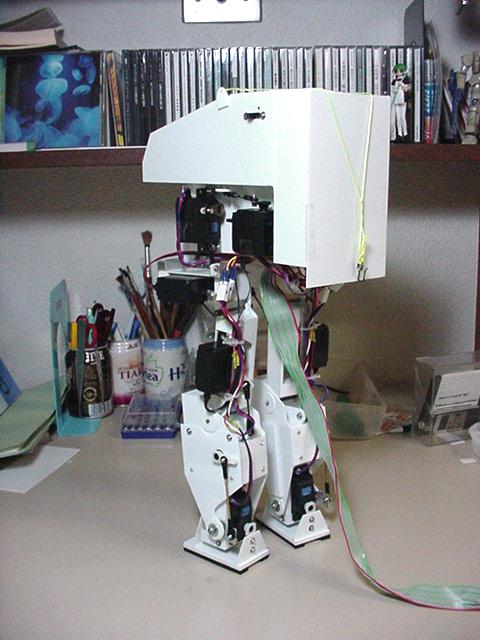
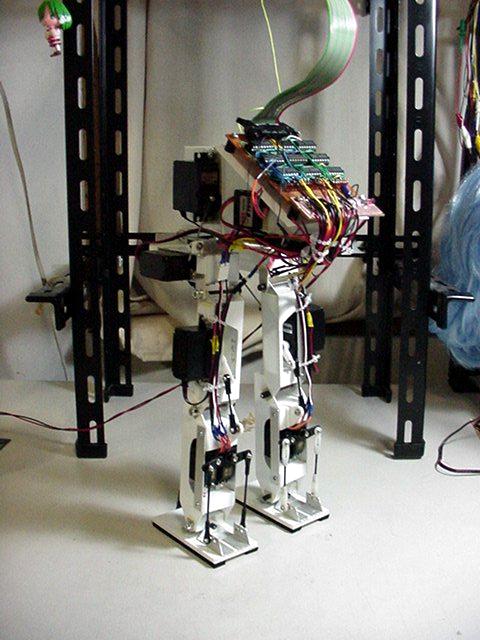
01.06.02(2L1v5) 股の関節の自由度を増やし、合計自由度を10から12に変更しました。 また、背中のボードがCPUを含むボード(サーボコントローラー7)に変わりました。 合計3個載る予定のCPUボードの内の一つで下半身のモーターの制御、ジャイロとの インターフェイス、タッチセンサーとのインターフェイス等の機能を担当します。 「胴体」の部分にはサーボコントローラー7の他にPG-03、ADXL202ボード、 動力系電源(ニッケル水素電池 4.8V 1500mAh)、制御系電源(リチウムイオン電池 7.2V 1500mAh) が入っています。 |
2L1v4
|
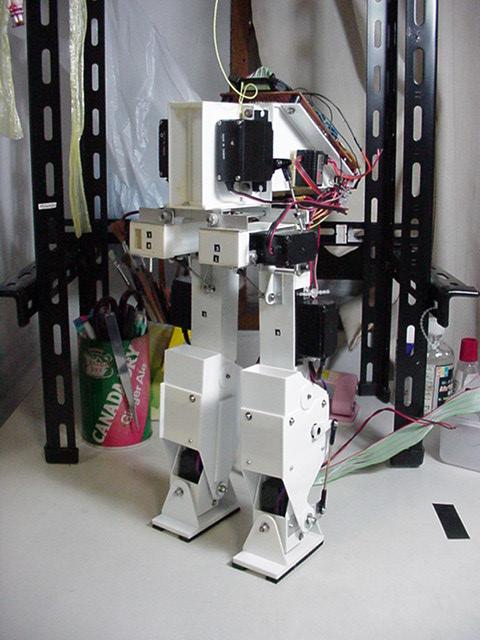
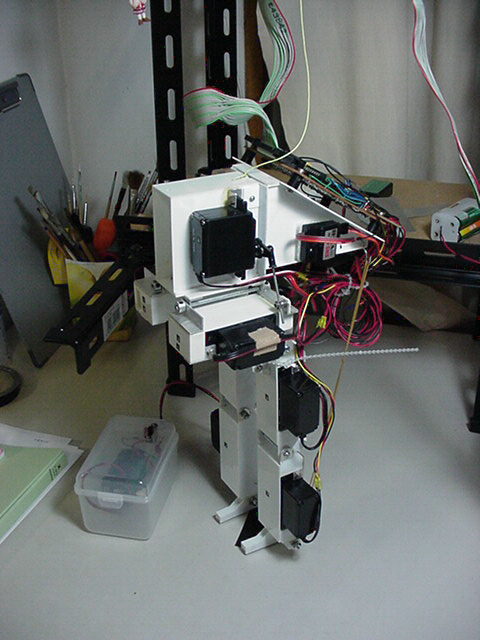
00.11.04(2L1v4) 足首の関節を2軸が1点に交わる形にすると共に、駆動するサーボを普通サイズの 物にしました。v3で可動範囲に不足を感じたので可動範囲も大きくしました。 |
2L1v3
|
00.04.15(2L1v3) 足首の自由度を1から2に増やすと同時に(合計自由度は10)、 足の接地を線から面に変えました。 この改造で静歩行が出来るようになりました。しかし、実験項目を残したまま8月下旬に 足首のサーボが壊れ(多分、負荷のかけすぎ)同型式のサーボも手に入らなかったので やむなく今の足を作りました。 このころからPCを486DX2(66MHz)からCeleron(500MHz)の物に買い換えました。 2L1に使うにあたって性能的な不足を感じていたわけではなく「5年たったので買い換えた」 というだけですがリアルタイムで足先の軌道修正の計算が間に合うようになって 良かったです。 なにを今更と思われるかもしれませんが、8086やV30と比べると最近のPC用CPUは むちゃくちゃな速さですねー。当時から少しずつ作ってきた自分のソフトをかけると 非常に強く感じます。 |
2L1v2
|
99.11.4 自由度8で初めのころはジャイロは1軸、後に3軸に増やしました。足の接地を「線」で 行っています。基本的なプログラムの開発を行いました。 |

|
99.07.20 写真右上からたどると、パラレルポートアダプター->サーボコントローラー ->信号分配ボード->ロボット本体の順に写っています。 この時は、まだジャイロが1個でした。サーボコントローラーにはH8/3048Fを 使用しています。 |
2L1v1
|
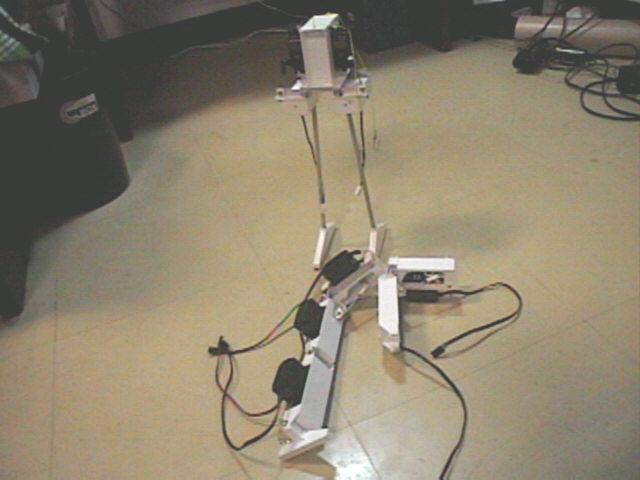
99.04.24(2L1v1) 6足歩行ロボットのコントローラーの分解能で、どの程度動 くのか、様子を見るため2サーボで動かしてみました。 手前に写っているものは、製作中の脚です。この時 「こりゃダメだ」と思ったので新しいコントローラーを 作りました。分解能の不足は主にCPUのスピード不足から 来ていたので、CPUを6MHzのZ80から16MHzのH8/3048Fに変えて 同じカラクリで作りました。 |