
はじめはちょっと作って、雑記のページに少し書き足す程度の考えで始めましたが、ただパーツの動作確認をしても つまらない気がして、W6やW7でやっていたテーマーの続きをやり始めたら興が乗ってきたので、独立したページを作りました。
| 全高 | 150mm |
| 全長 | 210mm |
| 全幅 | 105mm |
| 重量 | 約680g |
| 自由度 | センサーヘッド:2,グリッパー:3 |
| モーター |
RCサーボ:SANWA SRM1301, TowerPRO SG92R 走行用:マブチFA-130RA |
| 電源 | リチウムイオン電池(7.2V 19.4Wh) |
| センサー |
etc. |
| CPU |
Windows PC mbed LPC1768 |
部屋のマッピング
ロボットのモーターの制御やセンサとのインターフェイスはロボット搭載のマイコン で行い、測定結果を地図にして、走行経路を決める類の処理はPCで行っています。 ロボットとPCはUSBケーブルでつながっています。 |
|
グリッパーデモ
PCとロボットは、透過モードにしたXbee経由で通信しています。 |
|
走破性のデモ
|
 |
 |
 |
 |
|
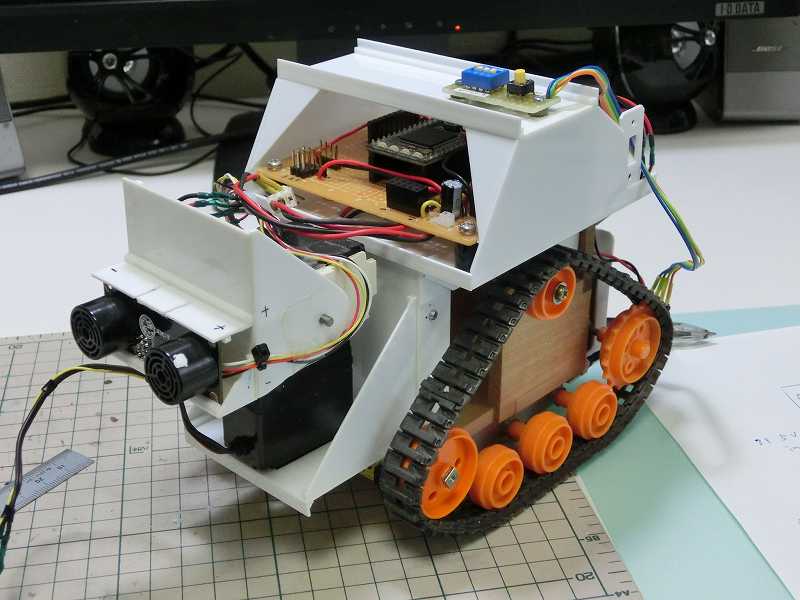
システム全体 本体とPCで構成されます。 |
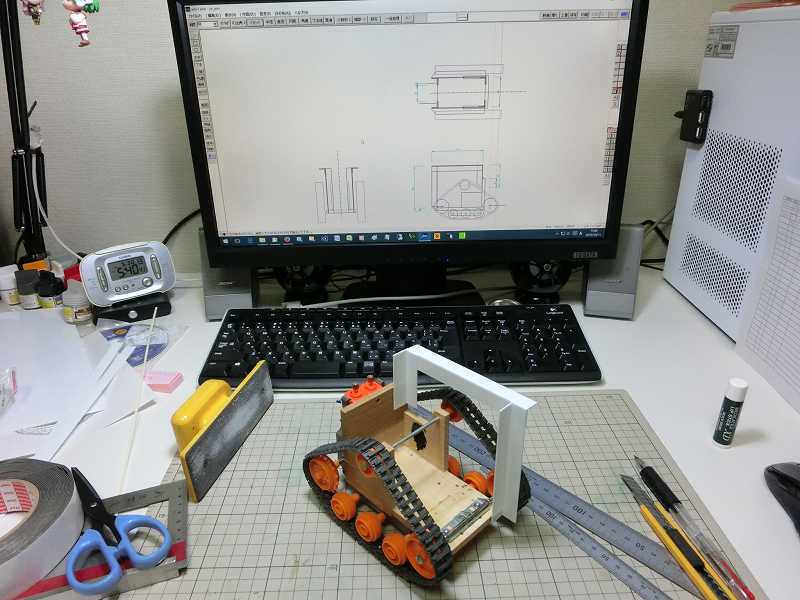
作業中のスナップ フレームの製作中です。 |
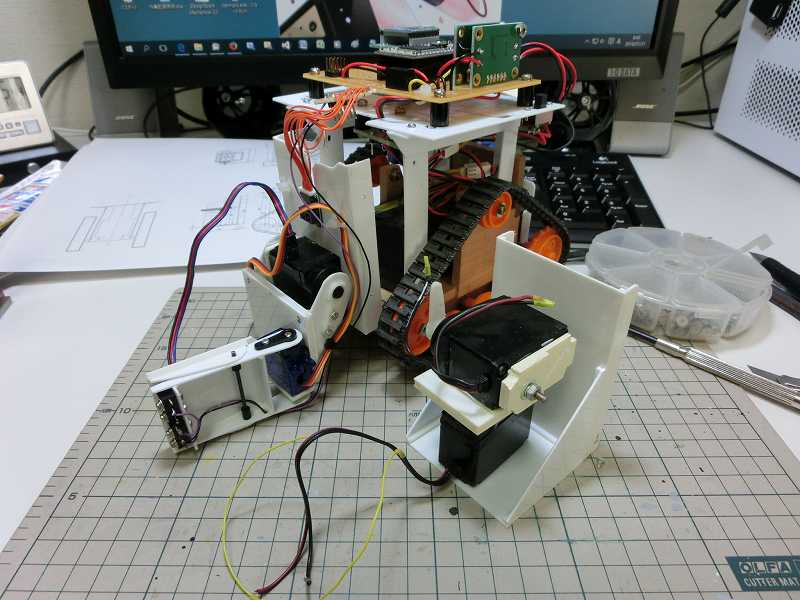
RCサーボの配置 グリッパーからセンサーヘッド への換装途中の写真です |
移動用モーター 田宮のツインモーターアボックスに FA-130系統のモーターを付けています |
 |
 |
 |
|
|
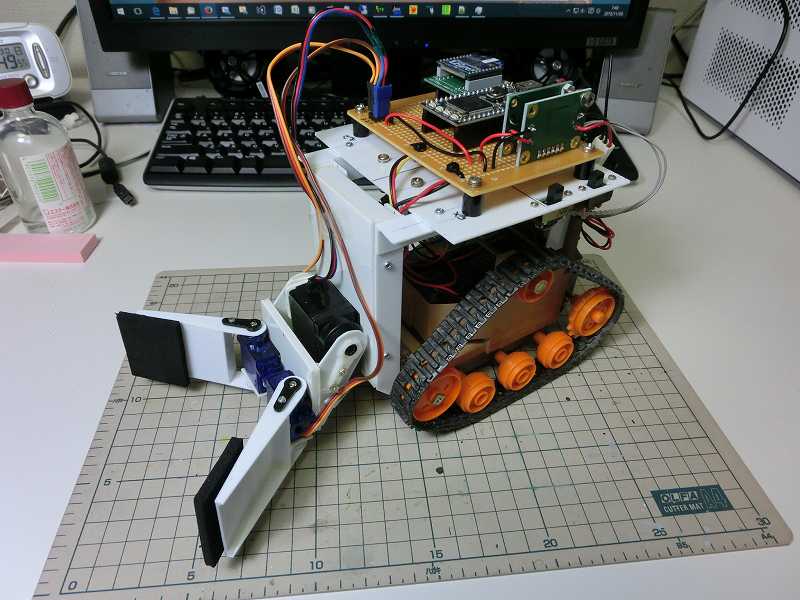
マイコンボード LPC1768とモータードライバ などが載っています。 |
Xboxコントローラ 操縦時に使います。 |
グリッパー 格安RCサーボの評価に 作ってみました。 |
|