概要
このページではソフトウェアについて説明します。
この機体にはパソコン(Windows)用とマイコン(H8)用のソフトがあります。
センサとのインターフェイスやモーターの制御など、ハードに近い、リアルタイム性を要する
処理はマイコンで行い、それ以外をPC行う方針で作りました。図で示すとと下のような感じになっています。
ソースコード公開のスタンス
よくロボットを見ていて「このロボットはどんなソフトで動いている
のだろう?」と興味を持つ事が多いので、自分のロボットの制御ソフト
のソースコードを公開します。前作からの流用部分も多いため、
コメントが嘘になっている部分や、実験の途中で使った後
使われなくなっている部分等ありますが、適当にご覧ください。
これらソースコード
の中に利用可能な部分を見つけられた方は、ご自分の責任の下に、自由に
使っていただいて結構です。
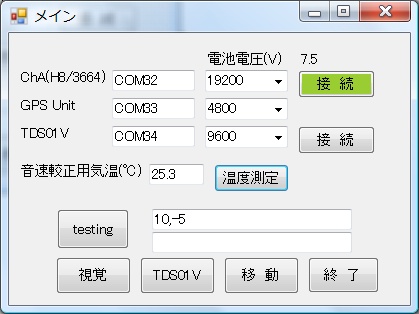
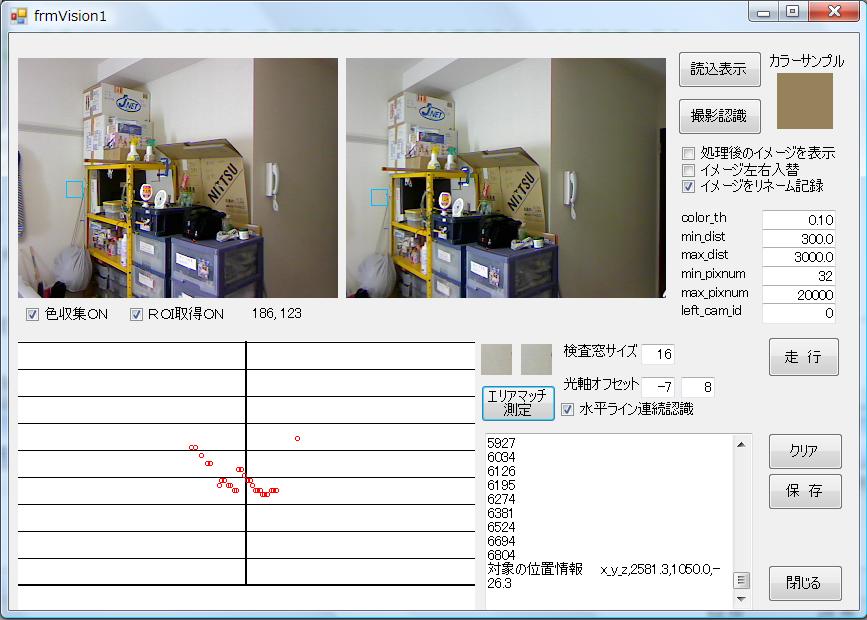
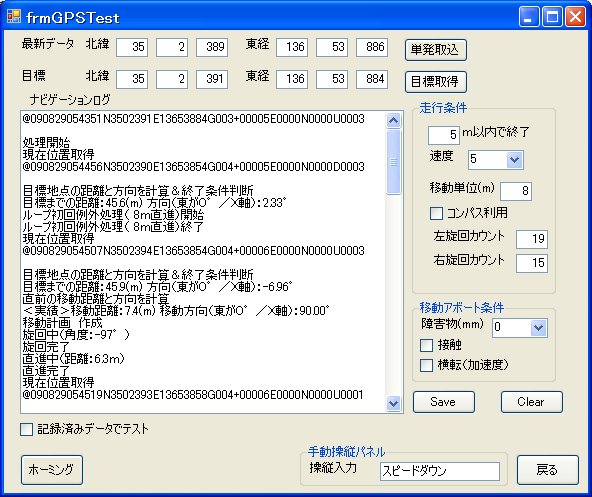
パソコン用ソフト
ソースコードのダウンロード:
アースローバーのハードが無いと使うことは出来ませんが、Windows上で動くVB&VC2008用の
プログラムなので
VB&VC2008でプロジェクトを新規定義し、圧縮ファイルに含まれるソースコード類を組み込むと
ハードに直接I/Oする部分以外の動きや、構成を確認できます。
プログラム名:w7b2--
ダウンロード(2010/10/23、VBのプロジェクトとフォーム)
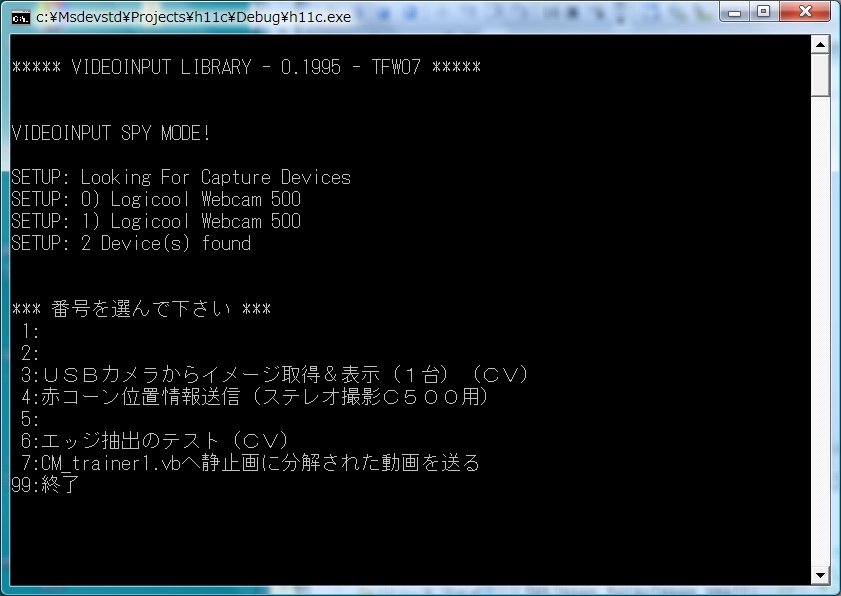
プログラム名:h11c--
ダウンロード(2010/10/23、VCのプロジェクトとフォーム)
こちらのソースコードはコンパイルにOpenCV1.0が必用です。
H8用ソフト
開発環境:
Visual C++2008 Express Editionでプログラムを作成し、コンパイルが通ることを確認した後、秋月で
H8キット用に販売されているCコンパイラを使っています。
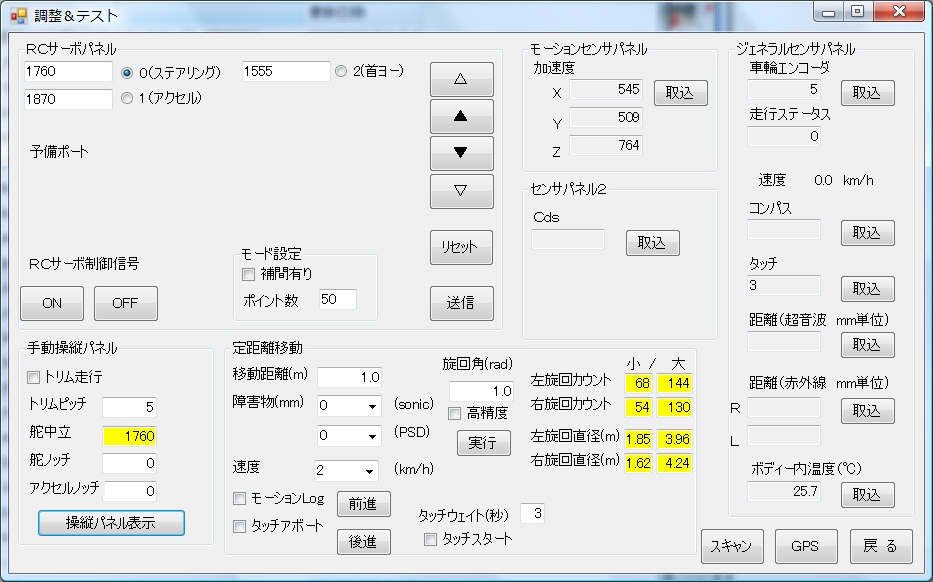
機能概要
移動距離の監視、走行用DCモーターの制御、
RCサーボ、加速度センサーおよびタッチセンサーとの
インターフェイスなど担当します。UNIのサブCPU用プログラムを
ベースとして開発しました。
走行中において、タッチセンサに反応があった場合にロボットを止める機能は、こちら側
のプログラムに実装されています。
ソースコードのダウンロード:
プログラム名:w7a
ダウンロード(2010/01/04、VCのプロジェクト、コンパイル用バッチファイル、バイナリなど)
戻る
ホームへ戻る