
(クリックで拡大)
マイコンのI/Oボード回路図(2009.08.16版)
USBシリアル変換モジュールのI/Oボード回路図(2009.08.16版)
{kind=link}
{kind=link}

|
制御用PC ロボット全体の制御を行います。WindowsXPのNetBookです。 機種はDELLのmini9でメインメモリ2G、HDDは32GのSSDです。 主に野外で歩きながら、場合によってはロボットに搭載して使うことを考えて、 安価なNetBookの中でも丈夫そうで、画面が明るく発熱が少なそうな機種ということで 選びました。 |
|
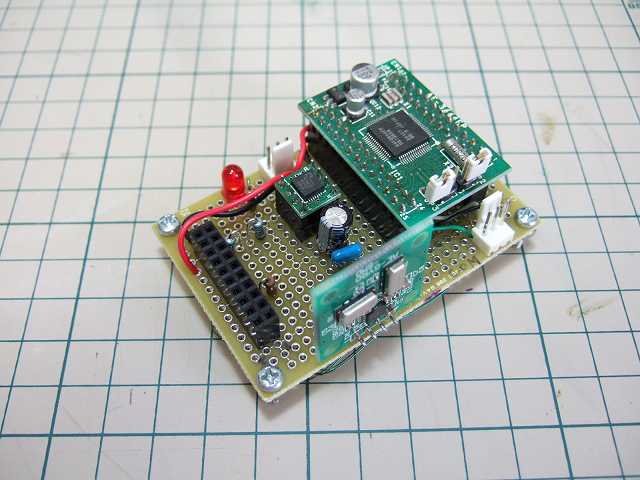
H8マイコン他 ハードと直接インターフェイスするためのマイコンです。機種はH8/3664を使っています。 I/OボードにはH8の他に3軸加速度センサ、2軸角速度センサ、動作確認用LED等が載っています。 下の写真の様にサイドボックスに搭載しています。
|

|
Webカメラ 周囲の画像取得に使用します。ステレオ処理で対象までの距離も分かるように2台装備します。 機種はロジクールのC500です。画角の広さとダイナミックレンジで選びました。
|
|
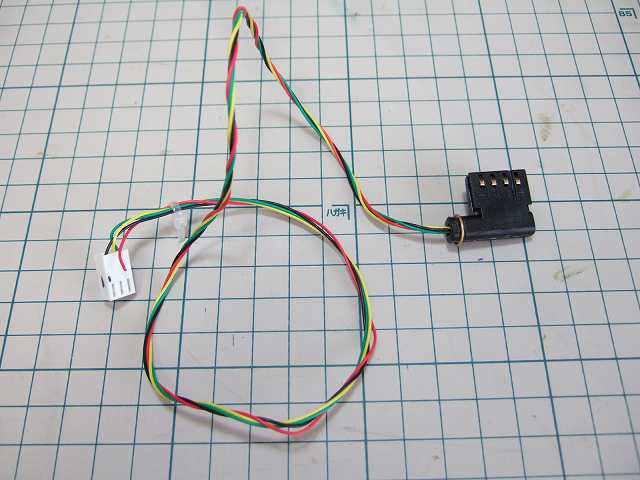
GPS Garmin社のeTrexHというハンディGPSレシーバーです。トレッキング用の機種です。 GPSレシーバーを工作に取り入れるのが初めてだったので、組み込み用のユニットではなく 単体で使えて画面まで付いている機種を選びました。ちなみにこのメーカで機種名にHが付いて いる機種は高感度型のレシーバー内蔵だそうです。RS232で測位情報を取り出せます。 測位情報のフォーマットは3種類選べますが、一般的なNMEA-0183を利用しています。 下の写真は自作の通信ケーブルです。GPS側のコネクタはサードパーティー製のキットを利用しました。 |
| 温度センサ |
ボディーの中にPCを内蔵するので、中が暑くなりすぎたら気がつくようにつけました。 センサーの機種は石塚電子製の AT502-1という使用温度範囲が-50度から105度のサーミスタです。
|
  
|
車輪エンコーダ 左側の後輪に付いています。走った距離を測ったり、旋回時の角度を割り出したりするのに使います。 ネオジム磁石とホール素子の組み合わせで構成されています。磁石は4個付いているので車輪が90度 回転するごとにパルスが出ます。パルスはH8マイコンのカウンタで受けています。 ホールセンサの機種はPanasonic製AN9027でデータシート上の検出距離は2.5mmです。 残念ながら2009/12/05現在は、生産終了状態です。
|
| RCサーボ |
ステアリングとセンサヘッドの向きを変えるために装備しています。 機種はセンサーヘッド用がサンワのERG-WRXで、ステアリングがKONDOのKRS2346ICSです。
|
|
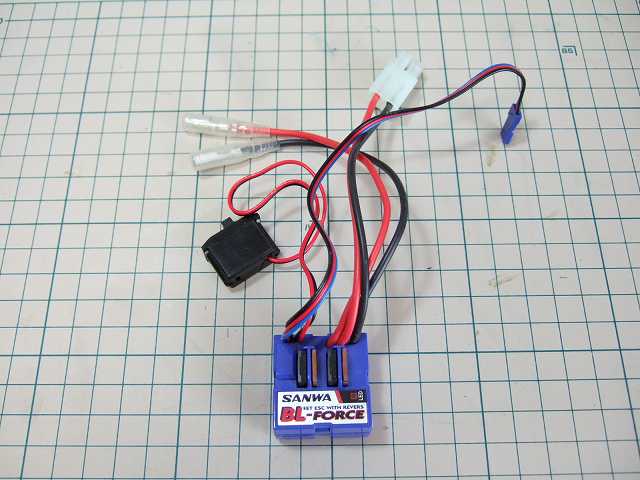
ESC(DCモーターコントローラー) 走行用のRS540モーターを制御するのに使用しています。ラジコンカー用のスピード コントローラーなのでRCサーボと同じ信号でRS540モーターを制御できます。 保護回路なども付いていて便利です。サンワのBL-FORCEという機種です。
|
|
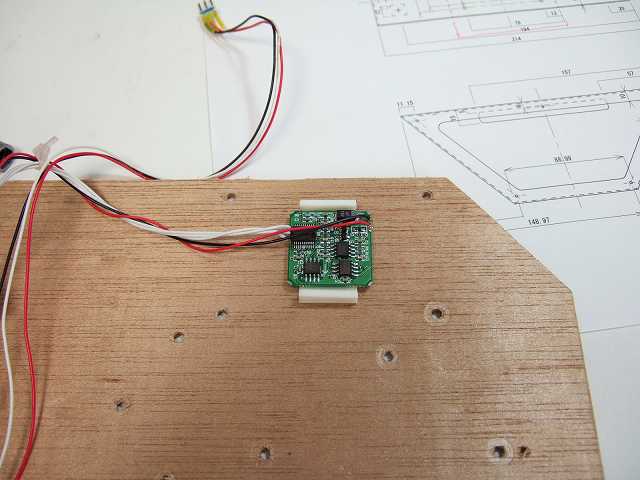
磁気コンパス 移動開始時に大体の向きが分かるようにRDCM-802を搭載しました。8方位の出力が得られます。
|
|
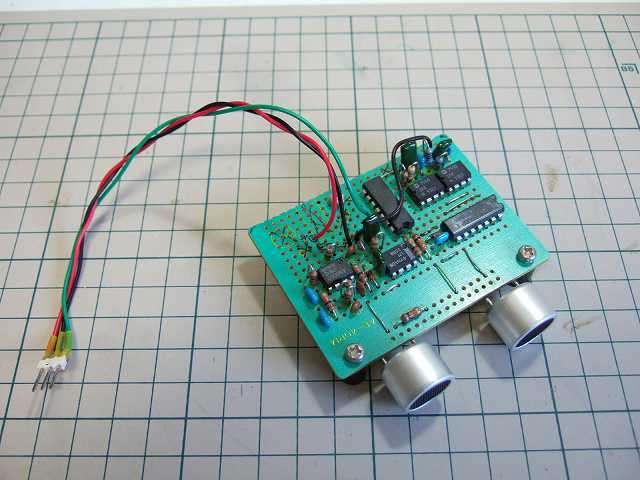
超音波距離センサ 秋月製のキットです。3mレンジ、40回/秒測定で使っています。
|