  |
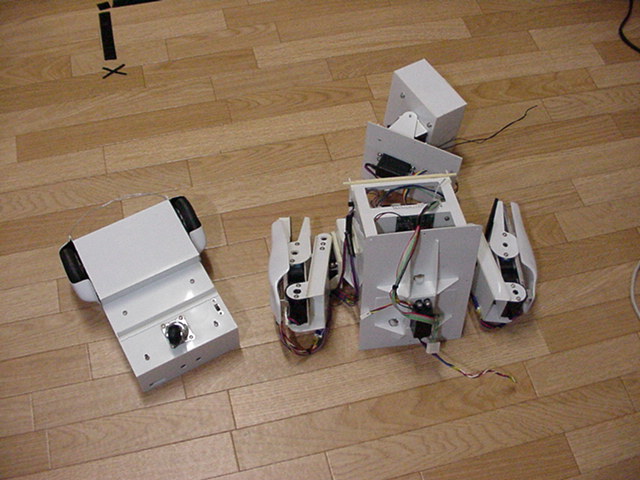
05.03.04 W6v3を頭部ユニット、胸部ユニット、移動ユニットに分解したところです。
頭にはメインCPUとカメラ、超音波距離センサ、赤外線距離センサ、磁気コンパス等の
センサ類が入っています。動きの統合や外界情報の取得を担当します。
胸部ユニットにはNo.2サブCPUと電源が入っています。RCサーボの制御を担当します。 移動ユニットにはNo.1サブCPUと移動用のモーターおよび車輪等が付いています。移動用の モーターの制御を担当します。
|
|
|
05.03.04 W6v3を頭部ユニット、胸部ユニット、移動ユニットに分解したところです。
頭にはメインCPUとカメラ、超音波距離センサ、赤外線距離センサ、磁気コンパス等の
センサ類が入っています。動きの統合や外界情報の取得を担当します。
胸部ユニットにはNo.2サブCPUと電源が入っています。RCサーボの制御を担当します。 移動ユニットにはNo.1サブCPUと移動用のモーターおよび車輪等が付いています。移動用の モーターの制御を担当します。
|
頭の部分は、主に「マイコンとカメラを入れる場所」として設計を始めました。 簡単に作るために箱型とし、マイコンとアナログ信号を出すセンサ類を、なるべく短い距離で 配線できることと、センサを配置した結果が「顔っぽく見える」こと等に留意しました。
首の可動範囲については、ヨー軸方向は、距離センサーでレーダーチャート を作る時の事を考えて±90度としました。ピッチ軸方向は手で拾おうとしているモノを 視野に納められることと、部屋の天井を見上げたり、床から近くに立っている人を見上げたり 出来るように±75度としました。
全体における頭の位置は、上記の視野確保等の目的に沿うよう一番高いところということで、 今の場所に決めました。
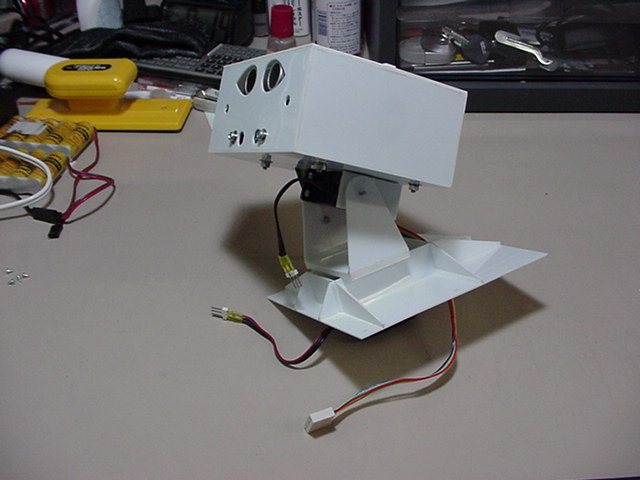 |
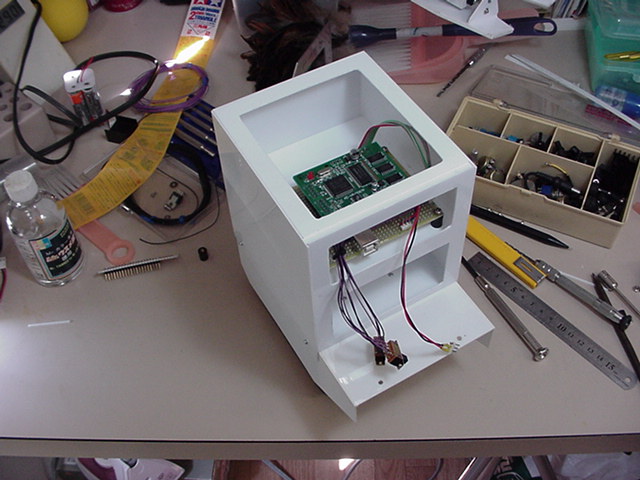
03.10.04 メインCPUとセンサー類を含む頭部ユニットです。6Pのコネクタで胸部ユニットの No.2CPUボードと接続します。RCサーボは全てNo.2サブCPUが制御しているので 、RCサーボのコネクタも2つ出ています。 |
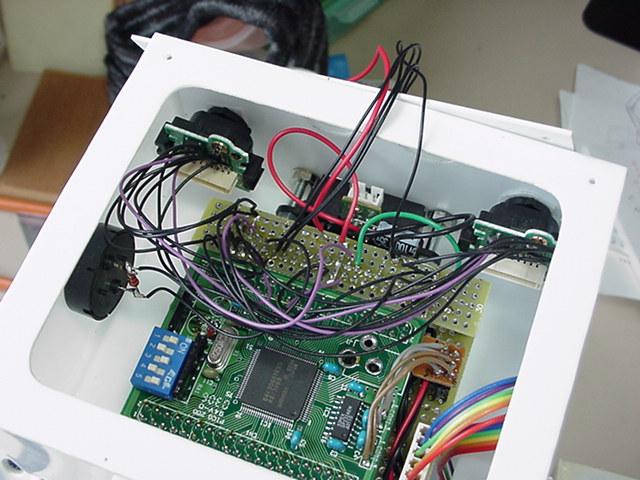 |
03.09.23 頭の中の写真です。あとで機能を拡張できるように 「とりあえず必要」と思ったスペースよりも大きめに作ってあります。 |
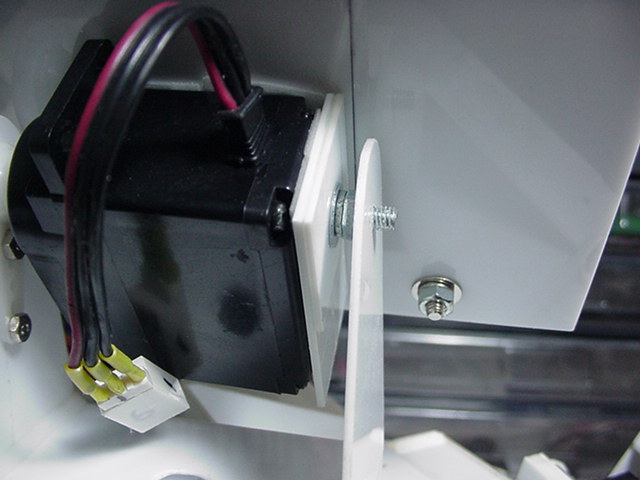 |
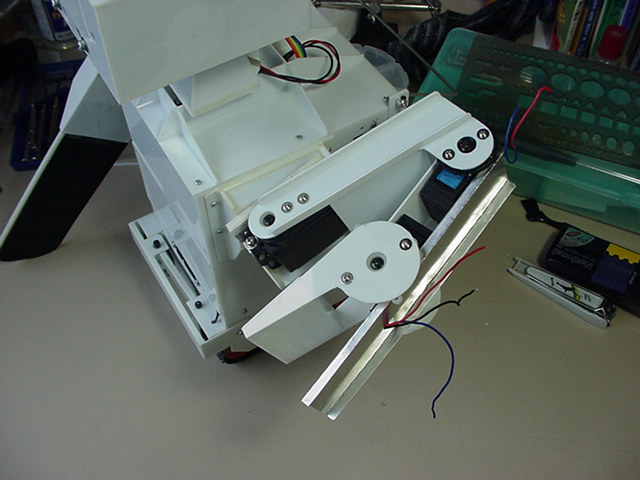
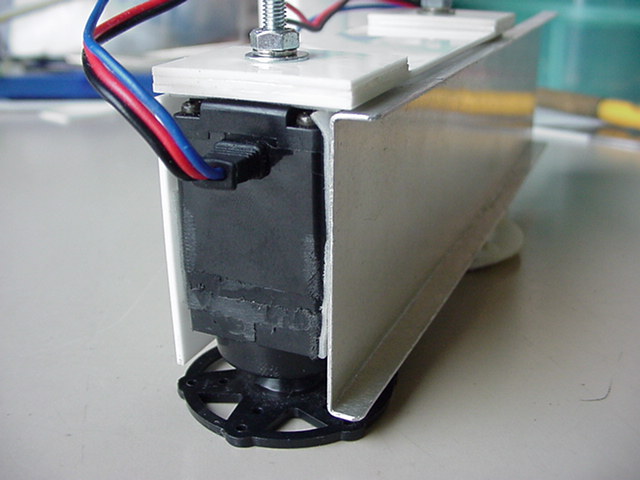
03.10.04 首のピッチ軸、RCサーボの出力軸の反対側の軸受けです。RCサーボの底フタに、 3mmの皿ネジを埋め込んだ2mm厚のプラ板を両面テープで貼り付けてあります。 |
 |
03.09.23 首の付け根の写真です。 |
腕部機構
腕は、肩や肘の関節がRCサーボの可動範囲いっぱいまで動けるように考えた関節の
配置としています。腕の長さは、床に置いてある知能ロボコンのスポンジボールに
手が届く長さということで決めました。パワーは、腕を伸ばした状態でも自分の腕の
重量を支えられることと、床の上から50g程度のモノを持ち上げられることを
設計の仕様としました。
肩部構造
このアームは、肩のピッチ軸方向の関節だけが片持ちの軸受けになっています。
そこで、モノを持ち上げた時などに発生する、軸に垂直な方向の荷重を支持するため、
サーボホーンと同じ高さの箱で囲んで支持するようにしています。
首部構造
ここも片持ちの軸受けになっているので、肩と同様にサーボホーンと同じ高さの箱で囲
んで支持するようにしています。
腰部構造
ここも片持ちの軸受けになっています。上半身の重量によって、RCサーボの軸に対して
スラスト方向に、比較的大きな一定方向の荷重がかかるので、RCサーボにスラスト荷重を
かけずに、スムーズに動くように、上半身を3個のローラーで支えるようにしています。
また、軸芯が狂っていても動くように、RCサーボはゴムブッシュを介して緩く弾性支持
しています。
 |
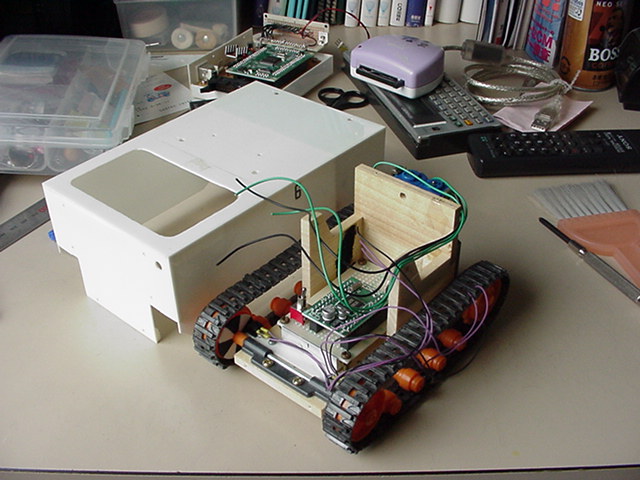
胸部構造 腕を付ける前の胸部構造です。移動ユニットType1の上に乗っています。 |
 |
03.08.25 腕部分の写真です。肩と肘の各関節は、およそ180度の可動範囲があります。 |
|
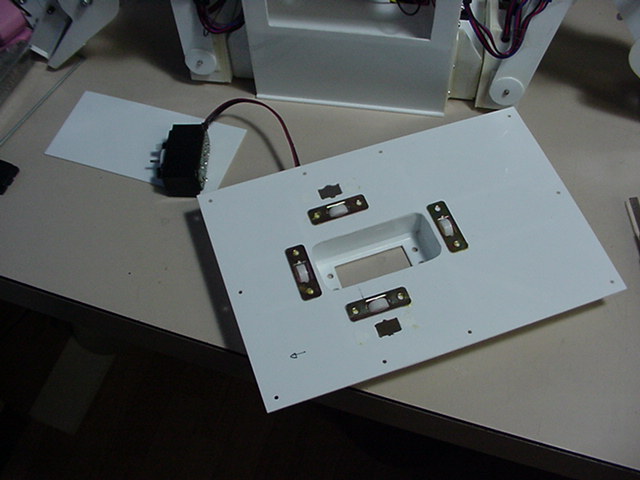
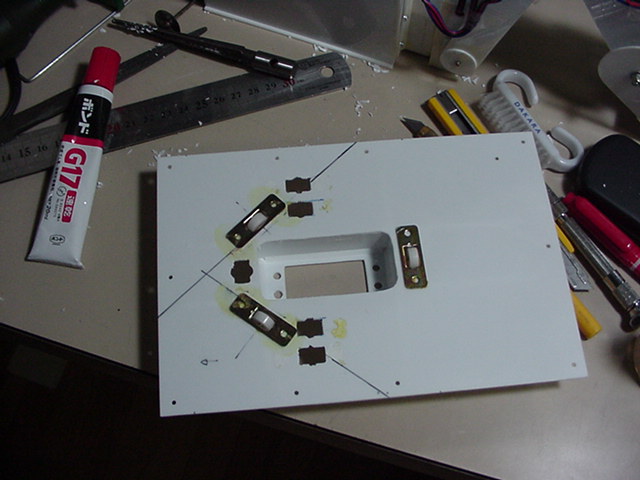
腰の裏側の写真です。こちらも、およそ180度の可動範囲があります。
RCサーボを囲むようにジュラコンのローラー付いています。
元々は4個のローラーで支えていましたが、必ず1つ以上が浮いてしまうので、 バランスよく3個に変更しました。 |
 |
02.08.24 肘と手のRCサーボは両面テープで取り付けてあります。 ここは、2足ロボットの足首等の様に「1つの関節に全ての自重プラス衝撃の荷重がかかる」 ということはないので、簡単に済ませてみました。 |
 |
02.08.30 肘から先(手の部分)の写真です。 |
移動ユニットType1
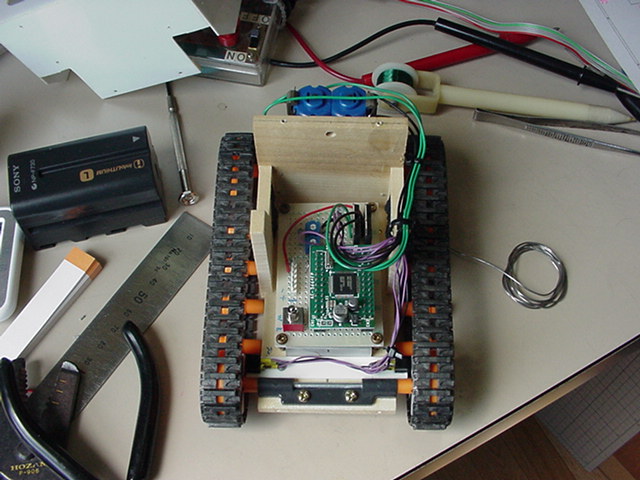  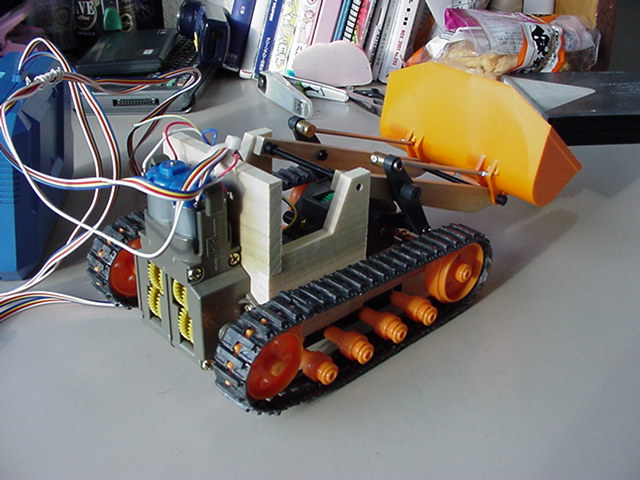 |
03.03.30 移動ユニットType1の写真です。田宮模型の「ショベルドーザー」キットに秋月のH8/3664マイコンキットが載っています。 キットの部品は、 「博物館」のページで紹介している「W1」の部品と見た目は似ていますが、材質も 金型も新しくなっていました。 「こんなに簡単で良いの」と言うくらい簡単に組上がります。 |
移動ユニットType2
 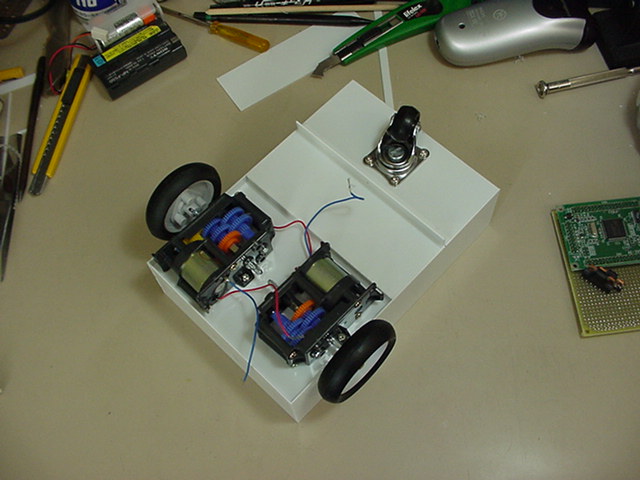 |
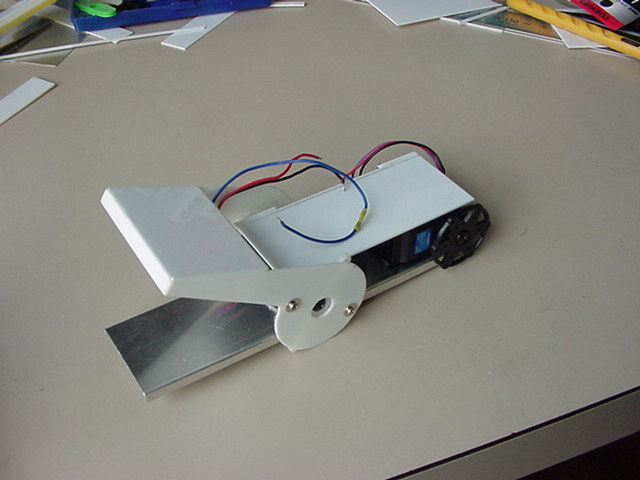
03.12.30 移動ユニットType2の写真です。 プラ板の箱に、「楽しい工作」のギアボックスとタイヤが付いています。キャスターは ホームセンターで売っているものです。マイコンはH8/3052Fが付いています。 |
CADデータ(JW-CAD for Windows Var.3.10用)