
メイン画面イメージ(2008/6/15版)
総合動作テストとカメラの操作をするための画面です。起動するとこの画面が初めに表示されます。
露出調整操作や、頭についている2台のカメラでステレオ撮影した画像の確認などが出来ます。
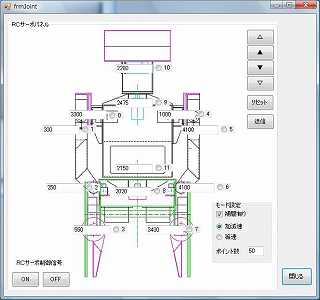
関節テスト画面イメージ(2008/6/15版)
各関節を個別に操作するための画面です。以前のバージョンに合ったモーションのテストに関する
機能はとりあえず必要ないので、まだ移植していません。Pen4号から流用したソースとフォーム
なので、他の部分とプログラミングスタイルが違いますが、細かいことは気にせず使っています。
関節の番号と実際の場所の対応が分かりやすいように、CADのイメージを背景に張っています

移動テスト画面イメージ(2008/6/15版)
一定距離の移動や、左右の移動用モーターの同期に関する機能のテストをしたり、テストの途中で
操縦してロボットをスタートポイントへ戻したりといった用途の画面です。
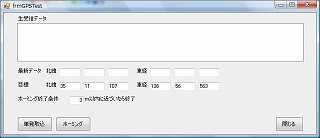
GPSテスト画面イメージ(2008/6/15版)
garminのハンディGPSであるeTraxHを積んで、野外での移動テストに使った画面です。目標の
緯度経度の場所へW6を誘導したり、eTraxHのシリアルポートから出力される座標情報を表示したり
するための画面です。eHrexHが移動用マイコンが出す電波の影響で衛星を捕捉出来ないことに気がついた
ところで、一時中断しています。