外を走るときに、距離センサーとして「シャープGP2D12」だけではレンジが短すぎて寂しいので、 搭載しました。 測定レンジは10cmから3.5mくらいまでとなるように調整しました。 調整と読み取り方法がいい加減なので、誤差は3%程度です。
 |
03.09.27 「頭」のフタの裏側に付いています。 |
このページでは、W6で使っている視覚以外の外界センサーについて説明します。
概要
外を走るときに、距離センサーとして「シャープGP2D12」だけではレンジが短すぎて寂しいので、 搭載しました。 測定レンジは10cmから3.5mくらいまでとなるように調整しました。 調整と読み取り方法がいい加減なので、誤差は3%程度です。
|
|
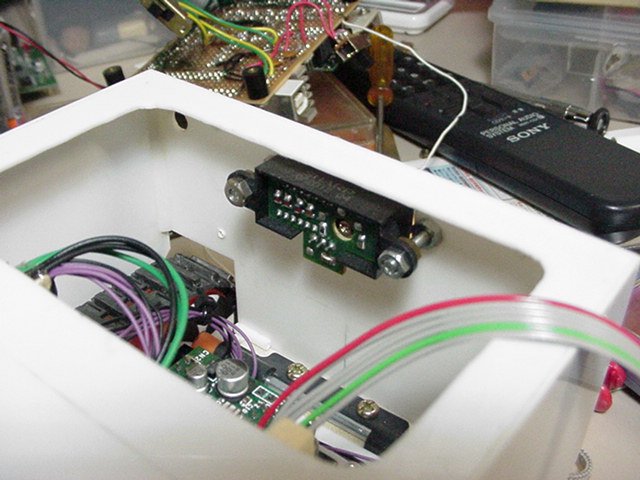
03.09.27 「頭」のフタの裏側に付いています。 |
インターフェイス
キットはそのままに組むと、電源電圧が9から12Vで動くようになります。W6v2は制御系電源も 動力系電源も5Vに統一してあるので、このユニットも5Vで動くように直そうかとも思ったのですが、 受動部品のストックが足りなかった一方、5V->12VのDC-DCコンバータIC(MAX662A)のストックがあったので、 12Vで使うこととしました。(ちなみに、W4とW6v1で使っていたころに、電源電圧9Vで使っていました。)
出力信号はトランジスタ(2SC945)を1つはさんで12V->5Vレベル変換しています。
概要
  |
03.04.05 移動ユニット前面についている方のセンサーです。同じものが頭にも付いています。 |
インターフェイス
こんな形の特性です。W6v2では下り坂の部分のみ多項式で近似して電圧から 距離に変換しています。測定結果の平均などの処理をしなくても使えるように 約10から60cmを測定レンジとして使っています。
参考文献:T.Yamamoto; ロボコンマガジンNo.13(2000年12月)「隔月の穴場 第1回」
概要
  |
03.04.20 移動ユニット前面についている方のセンサーです。左右独立して動作可能です。 |
 |
03.09.20 手のひら側の写真です。この上にカバーが付きます。 |
 |
03.09.20 手の甲側の写真です。指先側のマイクロスイッチは2mmのネジで留めていますが、 手のひら側は接着剤で留めてあります。 |
 |
03.09.20 手先のカバーを付けたところです。手に物を挟んだ時と、指先で物を押したときに反応します。 手のひら側のスイッチは独立して動作できますが、指先側は1つのスイッチとして働きます。 動作を確実にするために2つのスイッチを付けました。 |
インターフェイス
概要
 |
04.10.20 顔の真中に「鼻」のように付いている筒の奥に見えているのがCdsです。 乱反射を避け、正面の明るさをより良く捉えるように、望遠鏡などの光学機器に 倣い、内側をつや消しの黒で塗装してあります。 |
インターフェイス
概要
センサーの機種は石塚電子製の AT502-1という使用温度範囲が-50度から105度のサーミスタです。実際に計測する範囲は、W6がシステム全体として耐えられると思う0度から60度の範囲と決めて、センサーのデータシートの温度と抵抗値の表から、回帰計算で2次の多項式を出して、プログラムに組み込みました。
 |
04.10.20 頭の下(あごの辺り)に付いている黒い部品がサーミスタです。 |
インターフェイス