 |
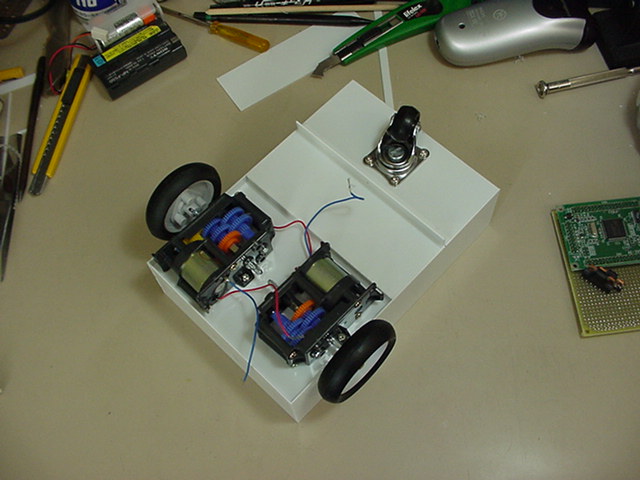
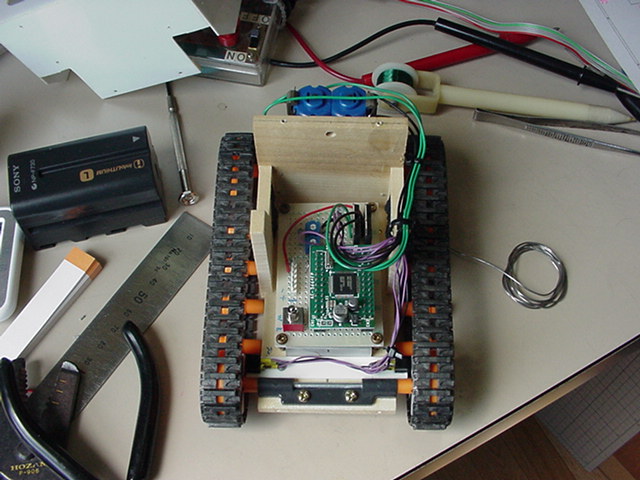
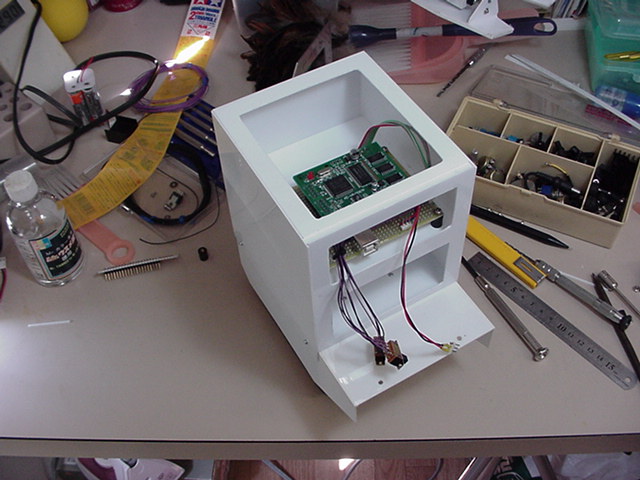
03.10.04 儊僀儞俠俹倀偲僙儞僒乕椶傪娷傓摢晹儐僯僢僩偱偡丅俇俹偺僐僱僋僞偱嫻晹儐僯僢僩偺 俶倧丏俀俠俹倀儃乕僪偲愙懕偟傑偡丅俼俠僒乕儃偼慡偰俶倧丏俀僒僽俠俹倀偑惂屼偟偰偄傞偺偱 丄俼俠僒乕儃偺僐僱僋僞傕俀偮弌偰偄傑偡丅 |
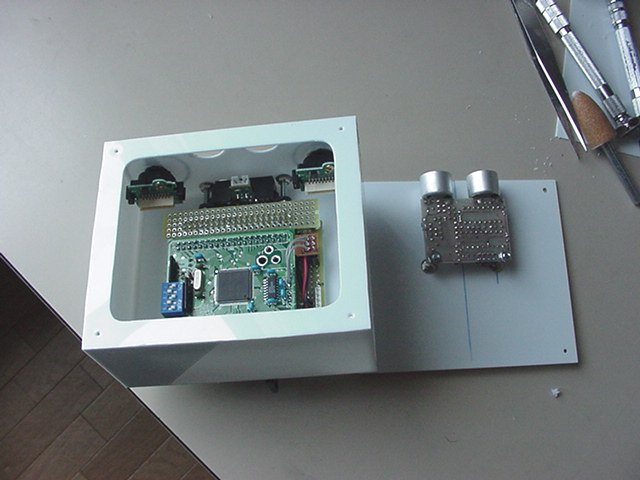 |
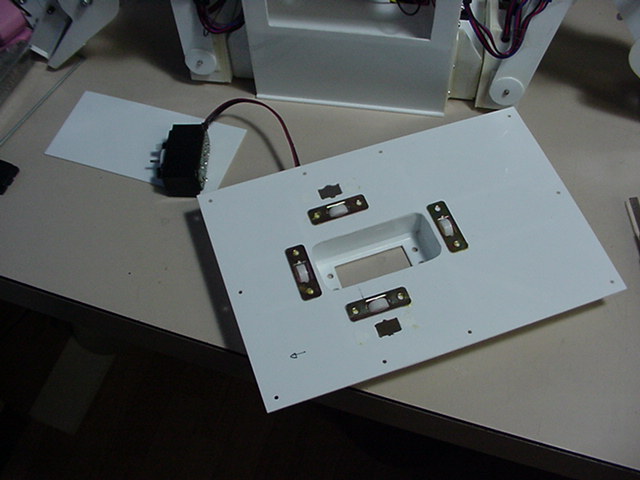
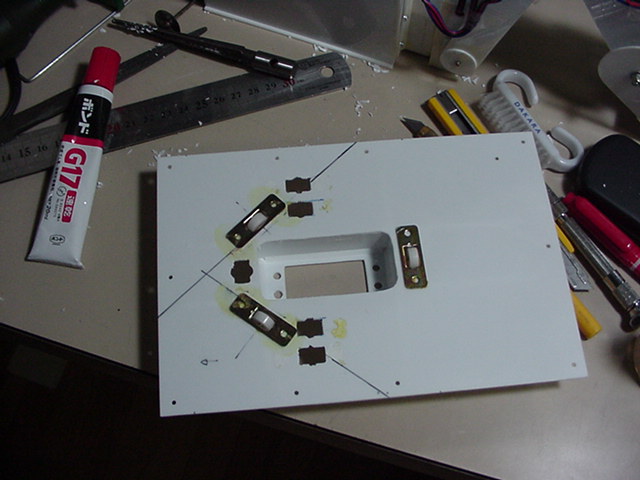
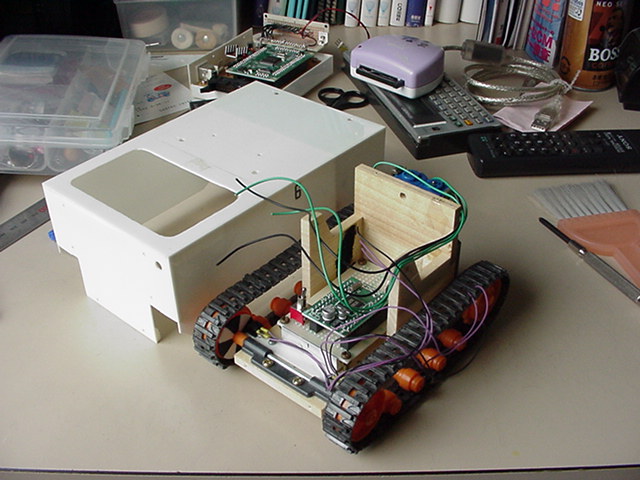
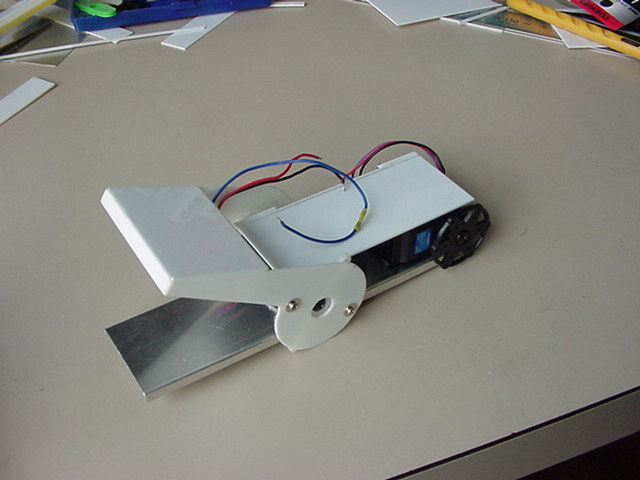
03.05.18 摢偺拞傪攝慄偺慜偵嶣塭偟偨幨恀偱偡丅偁偲偱婡擻傪奼挘偱偒傞傛偆偵 乽偲傝偁偊偢昁梫乿偲巚偭偨僗儁乕僗傛傝傕戝偒傔偵嶌偭偰偁傝傑偡丅 |
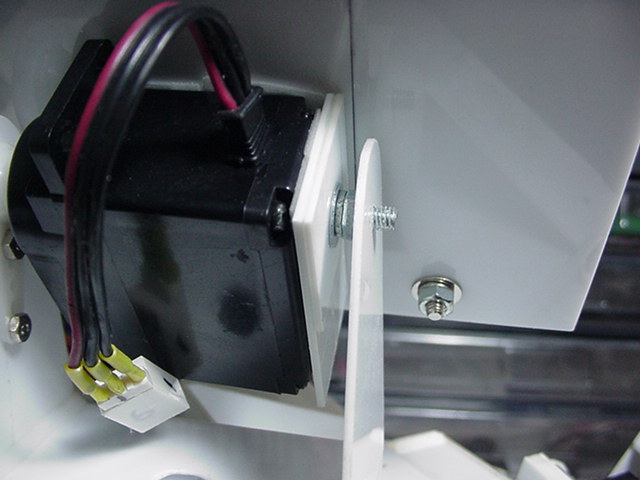 |
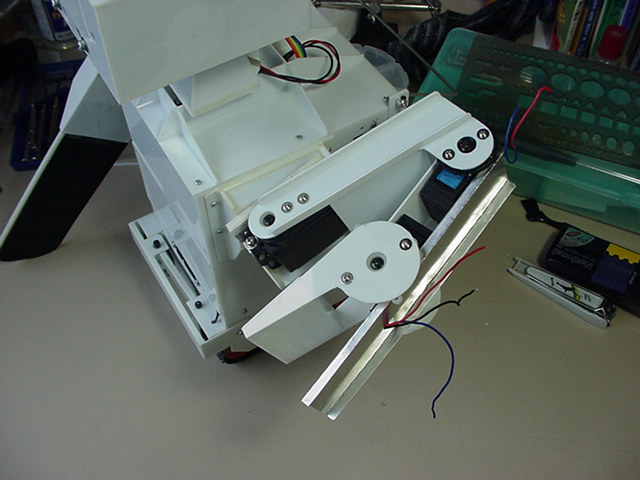
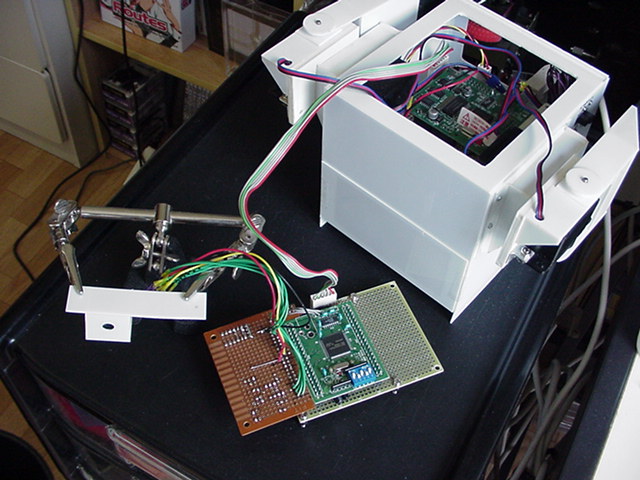
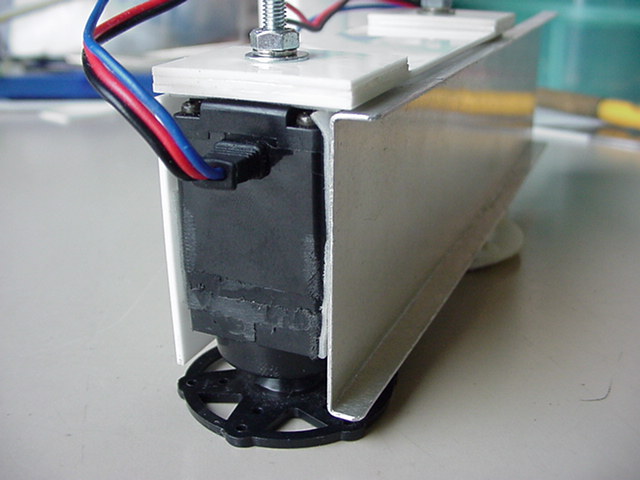
03.10.04 庱偺僺僢僠幉丄俼俠僒乕儃偺弌椡幉偺斀懳懁偺幉庴偗偱偡丅俼俠僒乕儃偺掙僼僞偵丄 俁倣倣偺嶮僱僕傪杽傔崬傫偩俀倣倣岤偺僾儔斅傪椉柺僥乕僾偱揬傝晅偗偰偁傝傑偡丅 |
 |
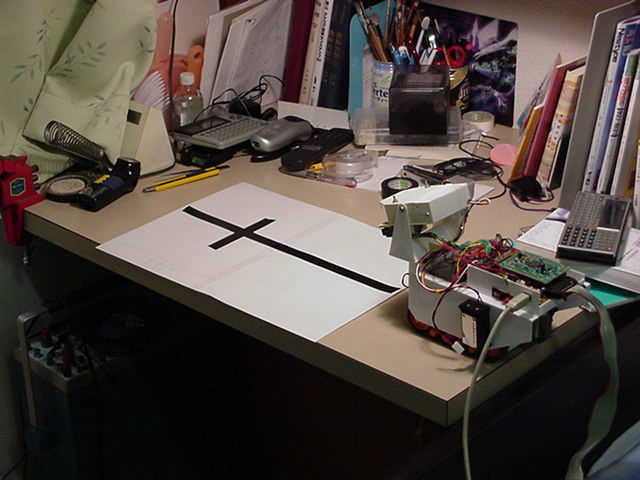
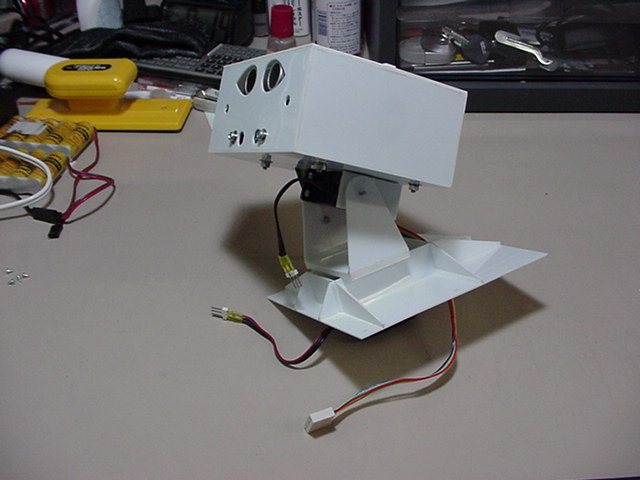
03.09.23 庱偺晅偗崻偺幨恀偱偡丅 |