頭と胴体は後で2足ロボットに流用しようと思っているので、 ある程度独立したものとして設計してあります。 インターフェイスの共通化を図ることにより、例えば 「移動ユニットを脚式のものと交換する」といったことも簡単に出来るように 考えています。
ユニット化することのメリットとしては、 ユニット単位でのアップグレードや、別ロボットへの 流用が簡単になる点があげられると思います。一方、デメリットとしては 「全体的に冗長で中途半端な ものになる可能性がある」ということがあると思います。
各CPUボード等の写真
  |
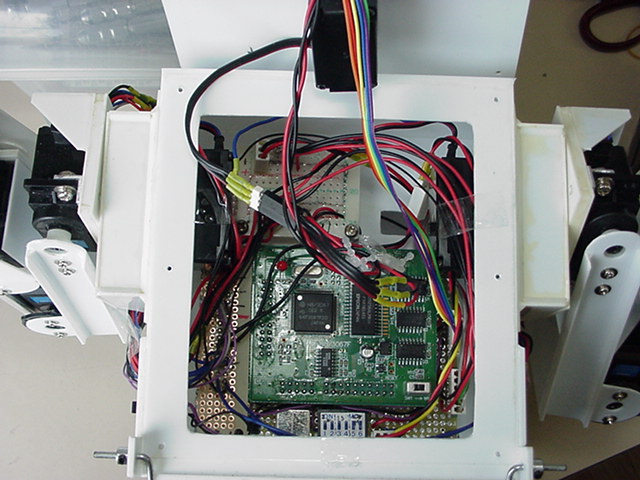
03.09.27:メインCPUボード 頭部ユニットの中にメインCPUとしてH8/3069Fのマイコンボードが入っています。 |
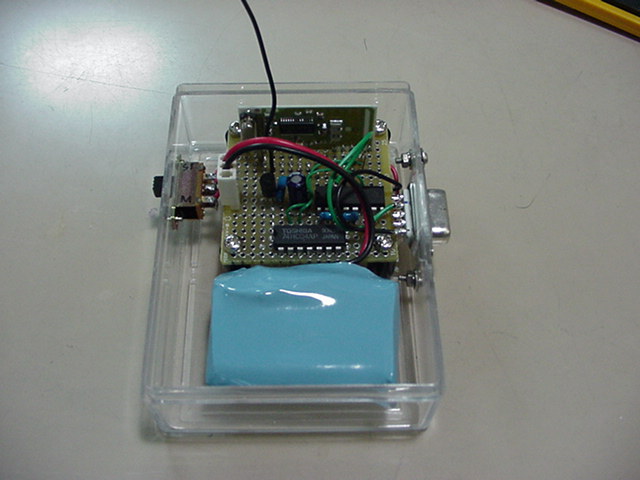 |
04.08.21:RF受信モジュール PCのシリアルポートにつないで使う無線モジュールの受信側です。 |
 |
03.09.23:No.2サブCPUボード 胸部ユニットの中にNo.2サブCPUとしてH8/3067Fのマイコンボードが入っています。 このアングルから見て、CPUボードの裏側に電池があります。 |
 |
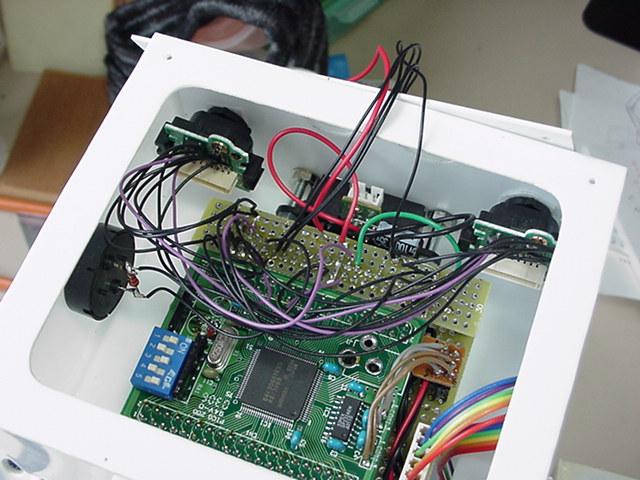
03.03.30 移動ユニットType1の中央にW6v2のNo.1サブCPUとしてH8/3664Fのボードがあります。 |
 |
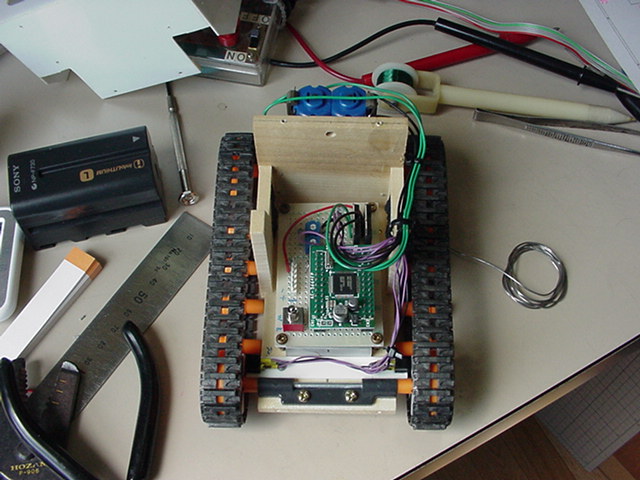
03.12.03 移動ユニットType2の後ろ寄りにW6v3のNo.1サブCPUとしてH8/3052Fのボードがあります。 |
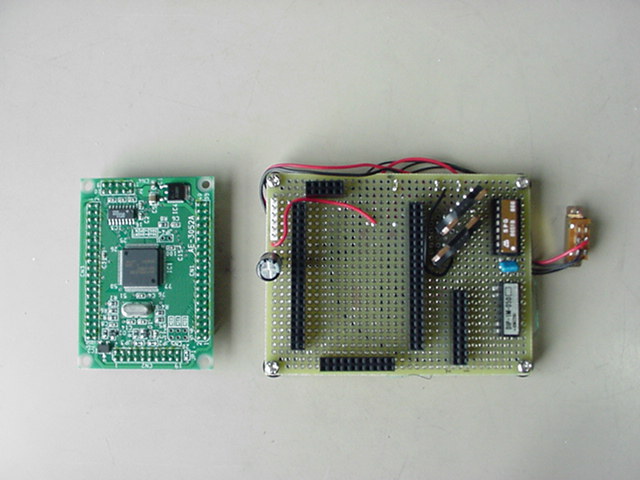 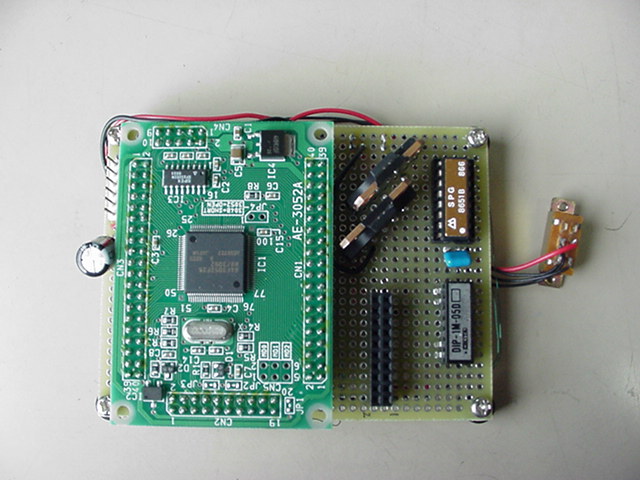 |
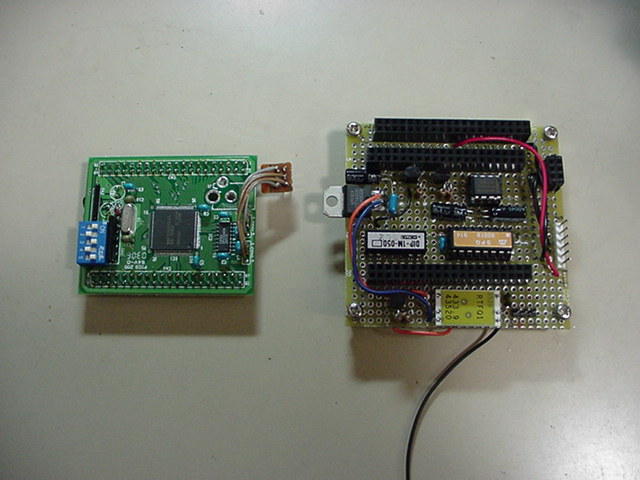
04.08.28:No.1サブCPUボード 移動ユニットType2用のNo.1サブCPUボードです。 クロック25MHzのH8/3052Fが付いています。 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}