概要
-
このページでは今までに、自作ロボットに使ったことがある電源について簡単に紹介します。
具体的な電池の性能や、取り扱いは、メーカーのサイトからダウンロードできるデータシート
や、専門の書籍等に譲るとして、ここでは、実際に自分のロボットに使ってみた感想などを中心に
書いてみます。
電池、安定化電源、3端子レギュレータそして電源系統の 構成例に分けて書きます。
電池



|
リチウム系充電池
カメラ用の電池 NP-F730 19.4Wh と NP-F570 15.8Whという機種を使っています。2003年頃に買ったものですが、 2017年現在、互換性がある?と主張するサードパーティー製でより大容量のタイプが売っていました。
ラジコン用の電池(通称?リチウムポリマー(Lipo)電池) 過充電、過放電で簡単に壊れ、過充電やショートで過熱させてしまうと、電解物質が引火性のガスに なるので危険です。YouTubeなどで、火事になっているラジコン飛行機やスマートフォンなどを見かけます。
ただ、単位重量あたり内蔵しているエネルギーがニッケル系の電池よりずっと大きく、内部抵抗も
小さいく、おまけに電池と充電器のセットが安いので魅力的です。
ラジコン用の電池(通称リチウムフェライト(Li-fe)電池) 写真はタミヤの6.6V-1100mAhのタイプです。コレには書いてありませんが、以前はA123のロゴがプリント されていました。 |



|
NiCd(ニッカド)電池
1本あたり1.2Vの電池で、バラのものと、複数本をパックしたものが売っています。 |

|
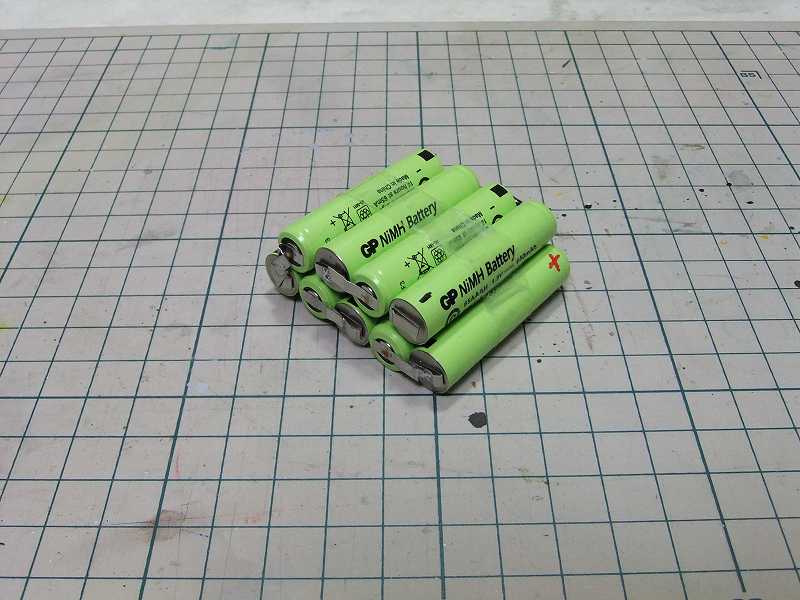
NiMH(ニッケル水素)電池
写真は2L5様に1.2V 650mAhの電池を9本パックしたものです。 |
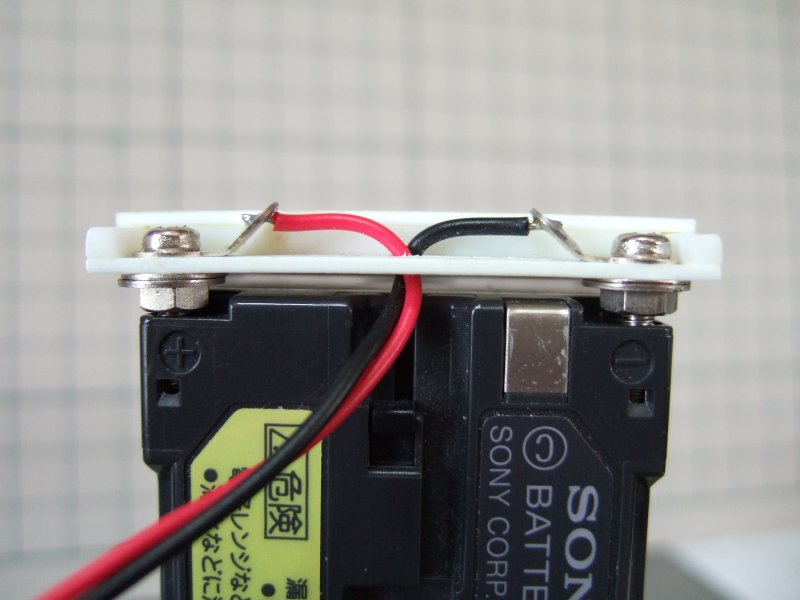
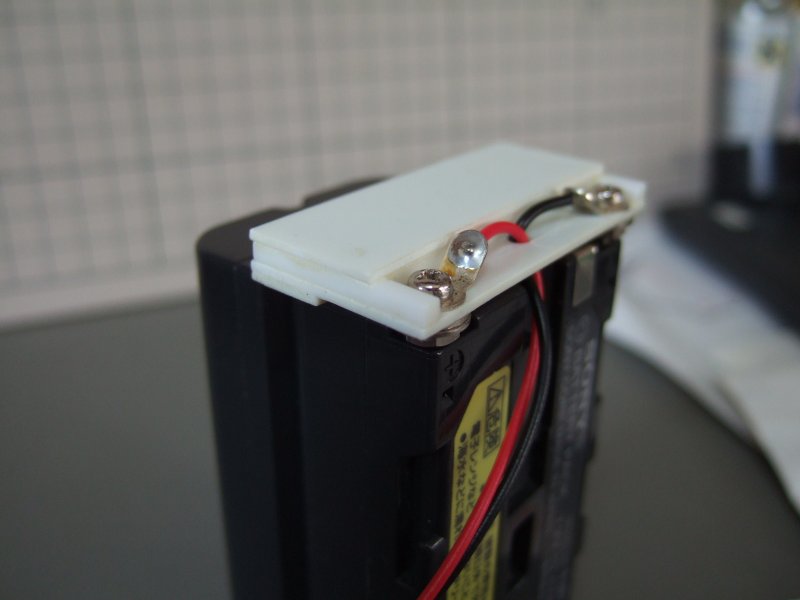
リチウムイオン電池スナップホルダ
-
ここで紹介しているカメラ用のリチウムイオン電池の類を使おうと思ったときに、製作しなければならないものなので
、参考に私が作ったものを紹介します。自分でもこの接点はどうかと思っていますが、使えています。
(電池の性能を十分引き出せていないような気もしています・・・)
   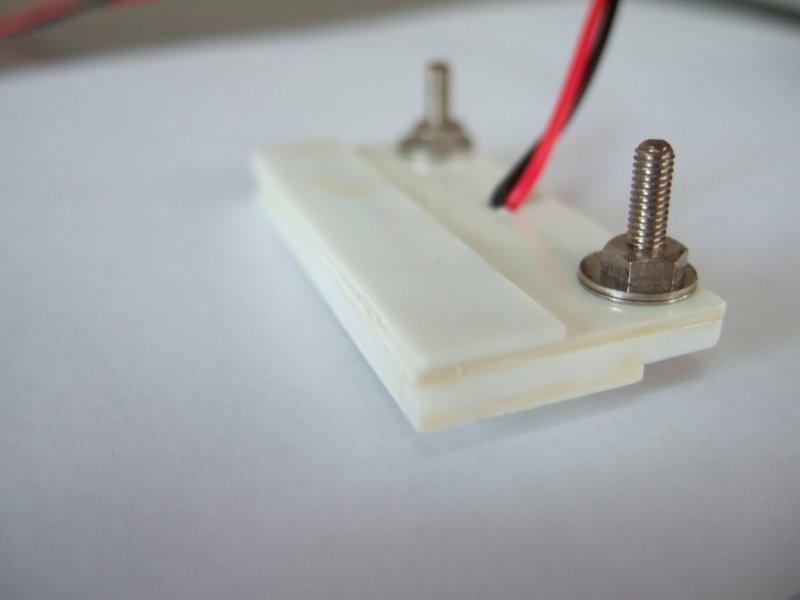 |
リチウムイオン電池スナップホルダ
図面のダウンロード(プラスチック製の部分、pdf形式) |
3端子レギュレータ
-
半導体で、電気の流れを制限することにより、安定させてながら電圧を変えるものです。
主にマイコンやセンサーユニットの電源系統に入れています。
例えば電池の7.2Vを5Vに安定化するときは、6L1、2L1等は7805を使っています。
それ以降は、より効率の高いNational Semiconductor製のLM2940CT-5.0を使っています。
部品選定は、これから作る回路の消費電力を良く考えて行うと良いでしょう。 可変抵抗で電圧を変えることに似て、 入力電圧と、出力電圧の差を熱にして出してきます。定格いっぱいまで使おうと 思う時はヒートシンク等の用意が必要になります。
私の場合、熱の処理(レギュレータ自体からの放熱と、ロボットのボディーからの放熱) が面倒なので、定格の半分くらいまでを目処に使っています。
スイッチング電源
-
回路を高速でスイッチングすることにより、安定させてながら電圧を変えるものです。
交流から直流、直流から直流(電圧を上げたり、下げたり)などいろいろあります。
DC-DCコンバータ
本サイトの2足歩行ロボットでは、電圧を安定化させることにより、ロボットの動きを
一定にする目的で入れています。
(各関節の角度の定常偏差が電池の残量に影響されなくなり、歩行が安定します。)
W6では、主に電池を1つにまとめることを目的として使っています。RCサーボの 出力を安定させると共に、関節がロックするなどして、異常に消費電力が大きい状態が 発生した時も、動力系統が電流を取りすぎて電池の出力電圧が下がり、マイコンがリセットする といったような事を防止する効果が期待できます。
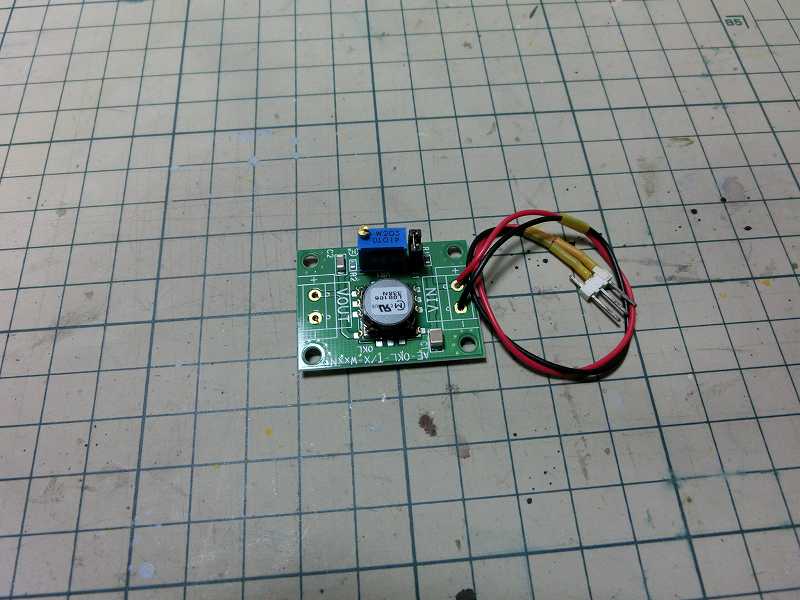
|
DC-DCコンバータ
|

|
電源ユニット
|
AC-DCコンバータ
主にプログラムを開発している間、ロボットが動き回らない時と、2足歩行ロボットの歩行調整時に使っています。

|
可変電圧型
出力を5~15Vで変えられます。2L5で使いました。 |

|
固定電圧型
|
電源系統の構成例
-
以下にW6の例を示します。
このロボットの電源系統は、主に制御系統、動力系統の2系統に分かれていますが
1個のLi-ionバッテリーから2系統に分けています。
制御系等の中でも、無線ユニットと超音波センサユニットが、それぞれ3.3Vと12Vを必要とするので 、制御系等の5Vから分岐して作っています。
ホームへ戻る